
三、STM8的学习笔记-----GPIO操作
三、STM8的学习笔记-----GPIO操作
3.1.前言
3.2.对STM8的GPIO介绍
3.3.简单操作单个IO口
3.4.模式介绍
3.5.例程
3.6.结尾
3.1.前言
STM8系列是意法半导体公司生产的8位的单片机。该型号单片机分为STM8A、STM8S、STM8L三个系列。本次学习我采用的STM8S103这块板;
在我的学习过程中,学习单片机,首先得知道如何控制它的GPIO口。关于GPIO共有12种工作模式,如果理解了这12种工作模式,那么在GPIO的学习过程中也会事半功倍。
3.2.对STM8的GPIO介绍
GPIO(英文:General-purpose input/output),通用型之输入输出的简称。其引角可以供使用者由程序控制并自由使用,通过对PIN脚的初始化可以实现通用输入(GPI)或者输出(GPO)或通用输入输出(GPIO)。
3.3.简单操作单个I/O口
STM8系列的单片机每一个端口都有一个输出数据寄存器(ODR),一个引脚输入寄存器(IDR),一个数据方向寄存器(DDR)。任何一个I/O引脚可以通过对DDR,ODR,CR1,CR2寄存器的相应位进行编程来配置。一个I/O口在工作是输入还是输出取决于该口数据方向寄存器的状态,对常用的几个寄存器介绍如下:
1、端口x数据方向寄存器(Px_DDR)
地址偏移值:0x20
复位值:0x00
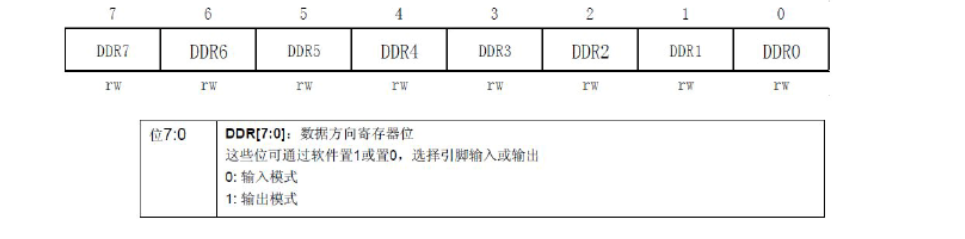
Px_DDR寄存器用于配置I/O口的输入输出模式,如果要点亮led灯,则需把与led灯相连的口配置成输出模式,如把PD4口的DDR寄存器置1,寄存器的配置如上图所示,即 PD_DDR|=0x01;就是DDR与十六进制10(00010000)相或。任何数与0相或都不变,与1相或则为1,所以相或有置位的效果,从右边低位0开始算起,第五个口刚好是PD4口,所以就是将PD4设置为输出模式。
2、端口x输出数据寄存器(Px_ODR)
地址偏移量:0x00
复位值:0x00
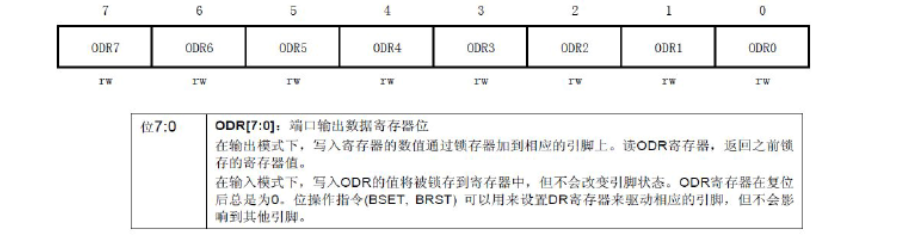
该寄存器通常只在IO口配置成输出时起作用,ODR寄存器里的值,表示输出模式下,IO口引脚上的值。所以,要想把IO口里某个或多个引脚置高或置低,只需操作ODR即可,寄存器如上图所示。
3、端口x输入寄存器(Px_IDR)
地址偏移值:0x03
复位值:0x00
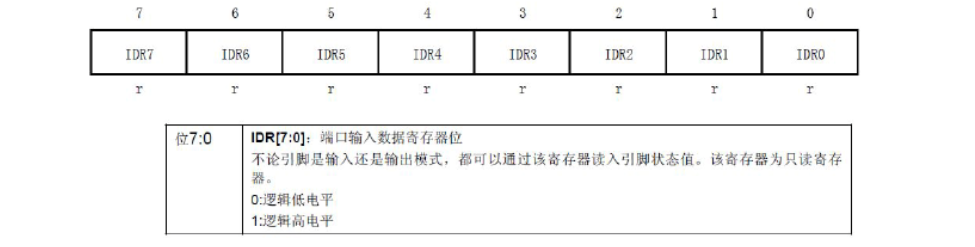
当IO口配置为输入时,可从此寄存器中读取当前IO口的状态值。
4、端口x控制寄存器1(Px_CR1)
地址偏移值:0x03
复位值:0x00

通常,模拟开漏输出需要外接上拉电阻,驱动能力较强,推挽输出不需要外接电阻,驱动能力较弱,对于led灯的点亮,推挽输出模式足以,所以 通常将IO口设置为推挽输出模式,当然设置为开漏输出模式的时候,在学习的过程中可能会遇到。
5、端口x控制寄存器2(Px_CR2)
地址偏移值:0x04
复位值:0x00

CR2控制寄存器多用来在输入模式下控制外部中断,在输出模式下作用不大。至此,我们已经把所有的GPIO口的寄存器都了解完了。
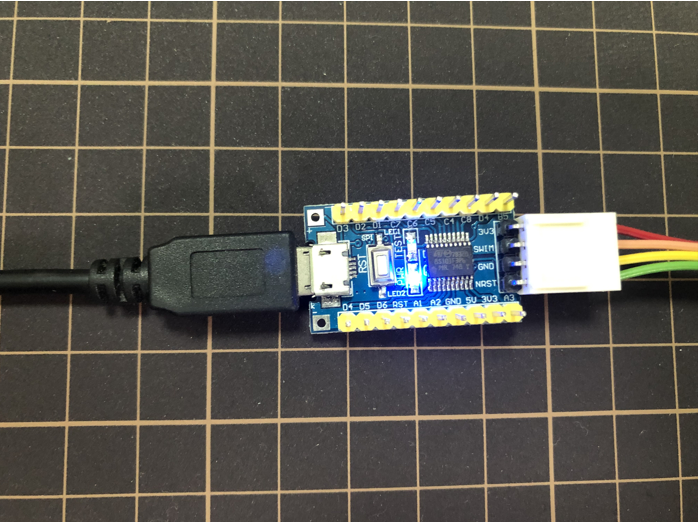
6、硬件连接原理

操作单个IO口,以点亮LED灯为例子,只需要配置PD4口就好
将下列代码放置在主函数中
PD_DDR |=0x10; //将PD.4设置为输出模式 PD_CR1|=0x10;; //将PD.4设置为推挽输出模式 PD_CR2 &= ~0x10; //设置PD.4输出速率最大为2MHZ PD_ODR |=0x10; //即PD.4=1 while(1)
操作单个IO口就简单讲到这里
下面就来了解STM8的12种I/O模式,在官方官方IAR例程中的库文件stm8s_gpio.h文件中可以找到,STM8全部的I\O模式。
typedef enum
{
GPIO_MODE_IN_FL_NO_IT = (uint8_t)0x00, /*!< Input floating, no external interrupt */
GPIO_MODE_IN_PU_NO_IT = (uint8_t)0x40, /*!< Input pull-up, no external interrupt */
GPIO_MODE_IN_FL_IT = (uint8_t)0x20, /*!< Input floating, external interrupt */
GPIO_MODE_IN_PU_IT = (uint8_t)0x60, /*!< Input pull-up, external interrupt */
GPIO_MODE_OUT_OD_LOW_FAST = (uint8_t)0xA0, /*!< Output open-drain, low level, 10MHz */
GPIO_MODE_OUT_PP_LOW_FAST = (uint8_t)0xE0, /*!< Output push-pull, low level, 10MHz */
GPIO_MODE_OUT_OD_LOW_SLOW = (uint8_t)0x80, /*!< Output open-drain, low level, 2MHz */
GPIO_MODE_OUT_PP_LOW_SLOW = (uint8_t)0xC0, /*!< Output push-pull, low level, 2MHz */
GPIO_MODE_OUT_OD_HIZ_FAST = (uint8_t)0xB0, /*!< Output open-drain, high-impedance level,10MHz */
GPIO_MODE_OUT_PP_HIGH_FAST = (uint8_t)0xF0, /*!< Output push-pull, high level, 10MHz */
GPIO_MODE_OUT_OD_HIZ_SLOW = (uint8_t)0x90, /*!< Output open-drain, high-impedance level, 2MHz */
GPIO_MODE_OUT_PP_HIGH_SLOW = (uint8_t)0xD0 /*!< Output push-pull, high level, 2MHz */
}GPIO_Mode_TypeDef;
3.4.模式介绍
1.浮空输入(Input Floating)
浮空输入在 I\O 模式中带有 IN_FL 字眼,如:GPIO_MODE_IN_FL_NO_IT 、GPIO_MODE_IN_FL_IT。
浮空输入也叫悬浮输入,一般把浮空输入和上拉输入做类比学习。浮空输入的电平不确定的,即使外部的一个很小的输入信号都会使其发生改变。如果引脚设置为悬空的情况下,读取该端口的电平是不确定的。
2.上拉输入(Input pull-up)
上拉输入在 I\O 模式中带有 IN_PU 字眼,如:GPIO_MODE_IN_PU_NO_IT 、GPIO_MODE_IN_PU_IT。
上拉输入的时候,引脚内部有一个上拉电阻通过开关连接到电源VDD, 当引脚没有和外部电路连接时,设置上拉输入方式的I/O引脚电平是确定的高电平。
3.开漏输出(Output open-drain)
开漏输入在 I\O 模式中带有 OUT_OD 字眼,如:GPIO_MODE_OUT_OD_LOW_FAST 、GPIO_MODE_OUT_OD_LOW_SLOW 、 GPIO_MODE_OUT_OD_HIZ_FAST 、 GPIO_MODE_OUT_OD_HIZ_SLOW。
开漏输出就是不输出电压,低电平时接地,高电平时不接地。如果外接上拉电阻,则在输出高电平时电压会拉到上拉电阻的电源电压。这种方式适合在连接的外设电压比单片机电压低的时候。输出端出跟集电极开路十分相似,工作原理也是一样的。不同的是,开漏输出使用的场效应管,使用时要加上拉电阻。
4. 推挽输出(Output push-pull)
推挽输入在 I\O 模式中带有 Output push-pull 字眼,如:GPIO_MODE_OUT_PP_LOW_FAST 、 GPIO_MODE_OUT_PP_LOW_SLOW 、 GPIO_MODE_OUT_PP_HIGH_FAST 、GPIO_MODE_OUT_PP_HIGH_SLOW。
推挽输出可以输出高,低电平,连接数字器件; 推挽结构一般是指两个三极管分别受两互补信号的控制,总是在一个三极管导通的时候另一个截止。高低电平由IC的电源低定。
5.中断和输出速度
中断在 I\O 模式中带有 IT 字眼。中断只存在 I\O 输入中,因为在输出中设置中断也没有任何意义。中断的意思就是中止当前的工作,然后去执行另外的任务,执行完之后再回来执行原来的任务。
输出速度也只存在 I\O 输出中,可以调整 I\O 的输出速度来将它们进行等级划分,如:low level,10MHz、low level,2MHz、high-impedance level,10MHz、high level,10MHz、high-impedance level, 2MHz、high level, 2MHz。
6.初始电平
我们初始化GPIO时候,会有一个初始电平的操作,例如GPIO_MODE_OUT_OD_LOW_FAST,GPIO_MODE_OUT_OD_HIZ_FAST,GPIO_MODE_OUT_PP_HIGH_FAST中,含有LOW、HIZ、HIGH,分别为低电平、高阻抗电平、高电平三种状态。
3.5.例程
1.编译环境
我的编译环境是IAR,这款软件是现在STM8的主流平台,比较推荐。
2.主芯片
本次学习我采用的STM8S103这块芯片其中STM8S的003、005、和103、105,配置一样(外设和CPU频率,FLASH),在代码相同的情况下均可进行烧写。
5.3 代码
GPIO.H
#define Led_Opt_Pin GPIO_PIN_5
#define Led_Opt_GPIO_Port GPIOB
GPIO.C
* Function Name : MX_GPIO_Init
* Description : GPIO_Init
* Input : None
* Output : None
* Return : None
********************************************************************************/
void MX_GPIO_Init(void)
{
//LED 模式为推挽高速输出
GPIO_Init(Led_Opt_GPIO_Port,Led_Opt_Pin, GPIO_MODE_OUT_PP_HIGH_FAST);
}
/*******************************************************************************
* Function Name : GPIO_TogglePin
* Description : None
* Input : None
* Output : None
* Return : None
********************************************************************************/
void GPIO_TogglePin(GPIO_TypeDef* GPIOx, GPIO_Pin_TypeDef GPIO_Pin)
{
GPIOx->ODR ^= GPIO_Pin;
}
LED灯灭

LED灯亮
3.6.结尾
以上的代码是使用库函数开发的,控制LED灯。
对STM8的GPIO的说明和引用到这里结束,感谢各位看官的点击。
如果觉得有所收获请点下推荐,若认为该博客中存在错误的说明或者对博客中某方面有疑问请留言。
本博客转载了一部分浩宇99的博文,大家如果有兴趣也可以前往下方链接去查看浩宇99的博客。
作 者:浩宇99✌
出 处:https://www.cnblogs.com/zhenghaoyu/p/10676192.html
版权声明:本文原创发表于 博客园,欢迎转载,但未经作者同意必须保留此段声明,且在文章页面明显位置给出原文连接,否则视为侵权。

