Launch VINS-Mono with Realsense D435i in RTAB-Map
Preparation:
- Remap topic from D435i to rtabmap
- Feed the odometry to rtabmap
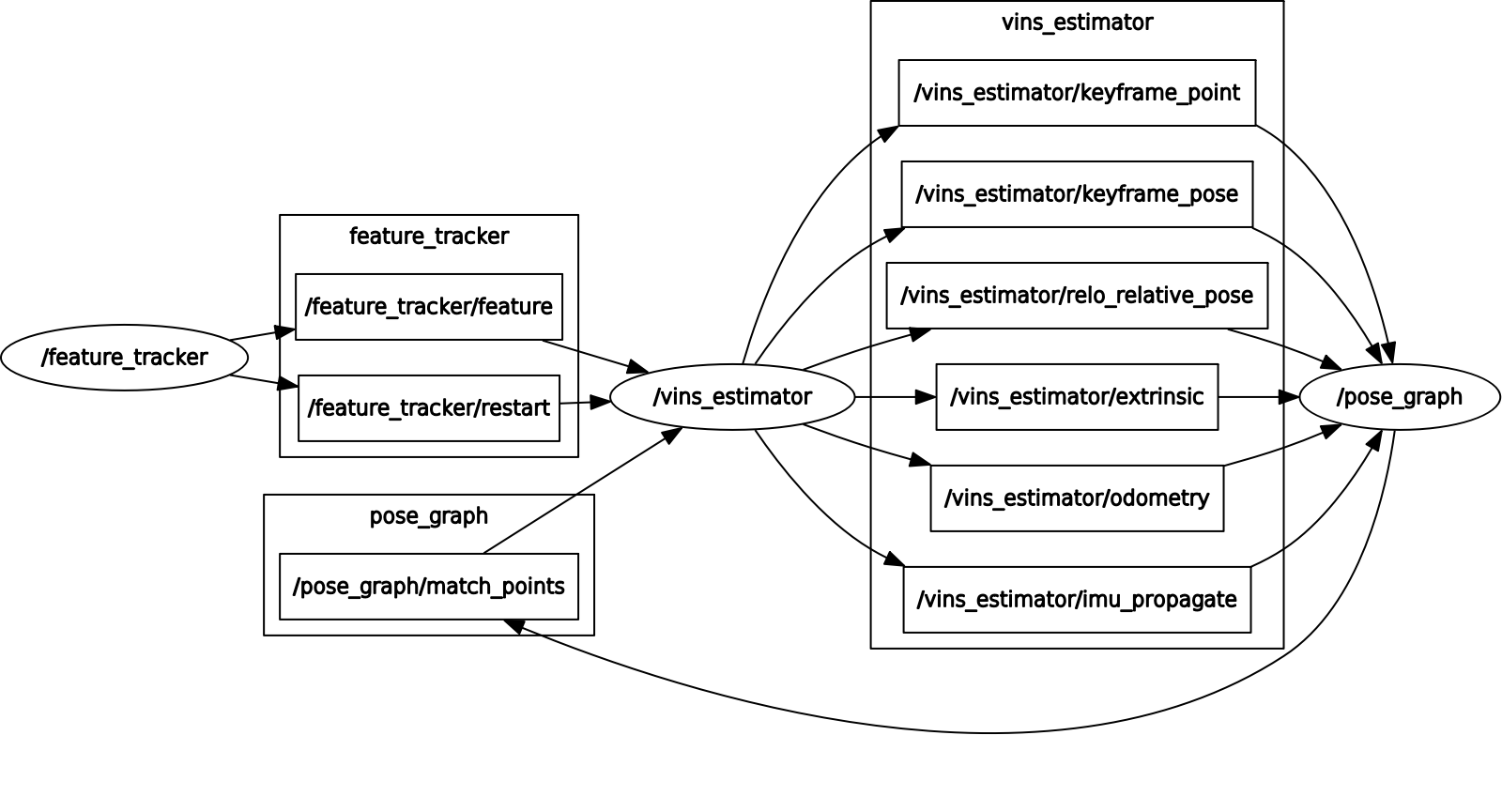
In the rqt_graph of vins_estimator, topic /vins_estimator/odometry is what rtabmap needs.
Running
Launch rtabmap:
roslaunch rtabmap_ros rtabmap.launch rtabmap_args:="--delete_db_on_start" depth_topic:=/camera/aligned_depth_to_color/image_raw rgb_topic:=/camera/color/image_raw camera_info_topic:=/camera/color/camera_info approx_sync:=false odom_topic:=/vins_estimator/odometry
Launch vins:
roslaunch vins_estimator realsense_color.launch
Launch realsense d434i:
roslaunch realsense2_camera rs_camera.launch
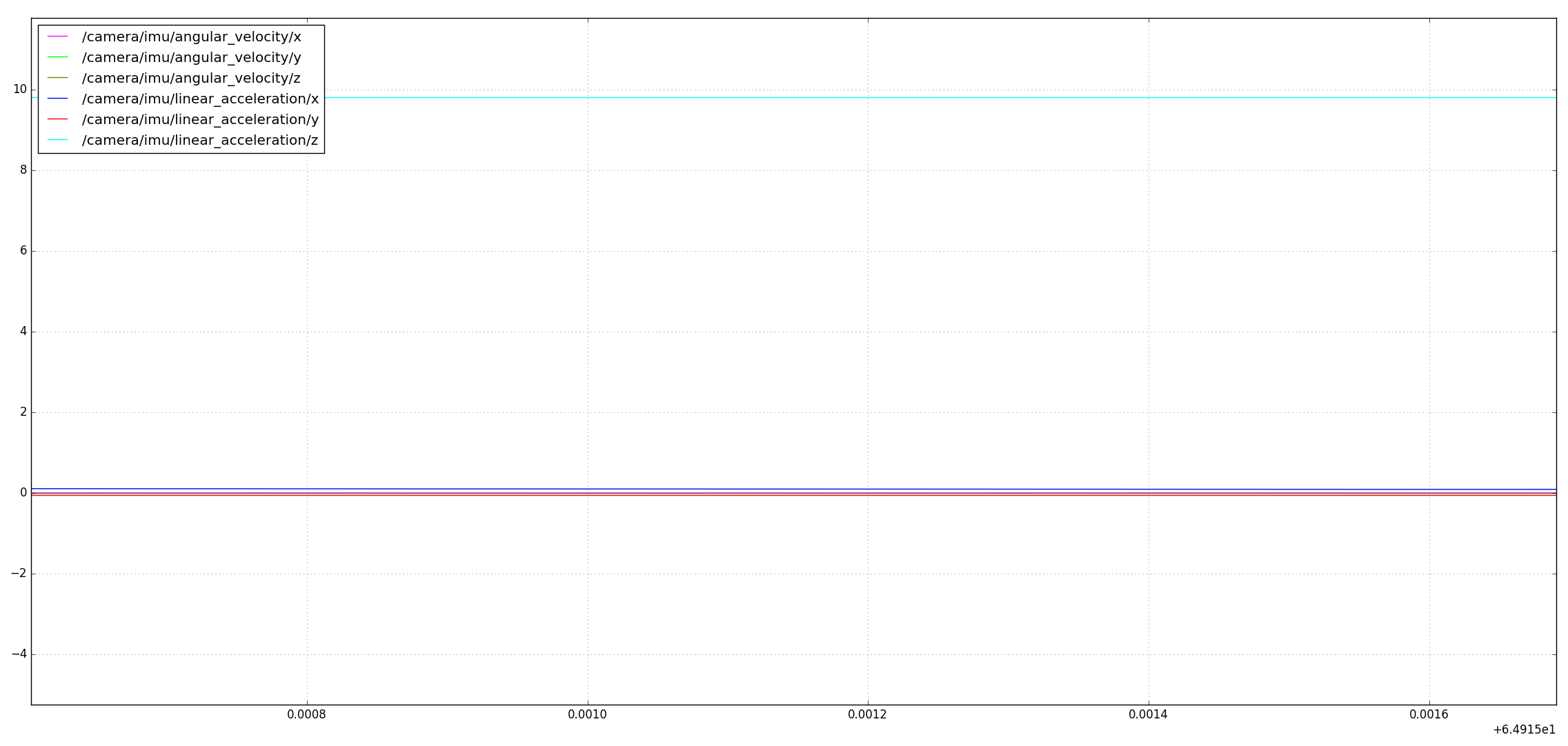
In addition, drifting of imu can be seen in rqt_plot by:
rqt_plot /camera/imu/linear_acceleration/x:y:z /camera/imu/angular_velocity/x:y:z
rosbag record
rosbag record -O wh_test /tf_static /camera/aligned_depth_to_color/image_raw /camera/color/image_raw /camera/color/camera_info /vins_estimator/odometry
Note that never forget topic /tf_static. It can be seen in rqt_graph when rtabmap was run successfully.
References:
[1] RGB-D Handheld Mapping
[2] 如何用Realsense D435i运行VINS-Mono等VIO算法 获取IMU同步数据

 浙公网安备 33010602011771号
浙公网安备 33010602011771号