打包mysql workbench
sudo apt-get install python3-rosdep
rosdep where-defined ANTLR4
sudo rosdep init
rosdep update sudo apt install g++ libx11-dev swig antlr4 libantlr4-runtime-dev gtk+-3.0 gtkmm-3.0 libpython3.7-dev libpython2.7-dev libgdal-dev libssh-dev
https://blog.csdn.net/czsnooker/article/details/120058151
sudo rosdep init
这个可能报错:
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
原因:网站被墙了,挂vpn可以访问
解决方法:
1、换手机热点,成功几率不大
2、sudo gedit /etc/hosts
底部添加:
151.101.84.133 raw.githubusercontent.com
185.199.111.133 raw.github.com
可能有效
3、直接写入文件
我挂vpn访问上面这个网站,得到
# os-specific listings first yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx # generic yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte # newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
sudo mkdir -p /etc/ros/rosdep/sources.list.d cd /etc/ros/rosdep/sources.list.d sudo gedit 20-default.list
把上面的内容粘贴到该文件中,保存、退出
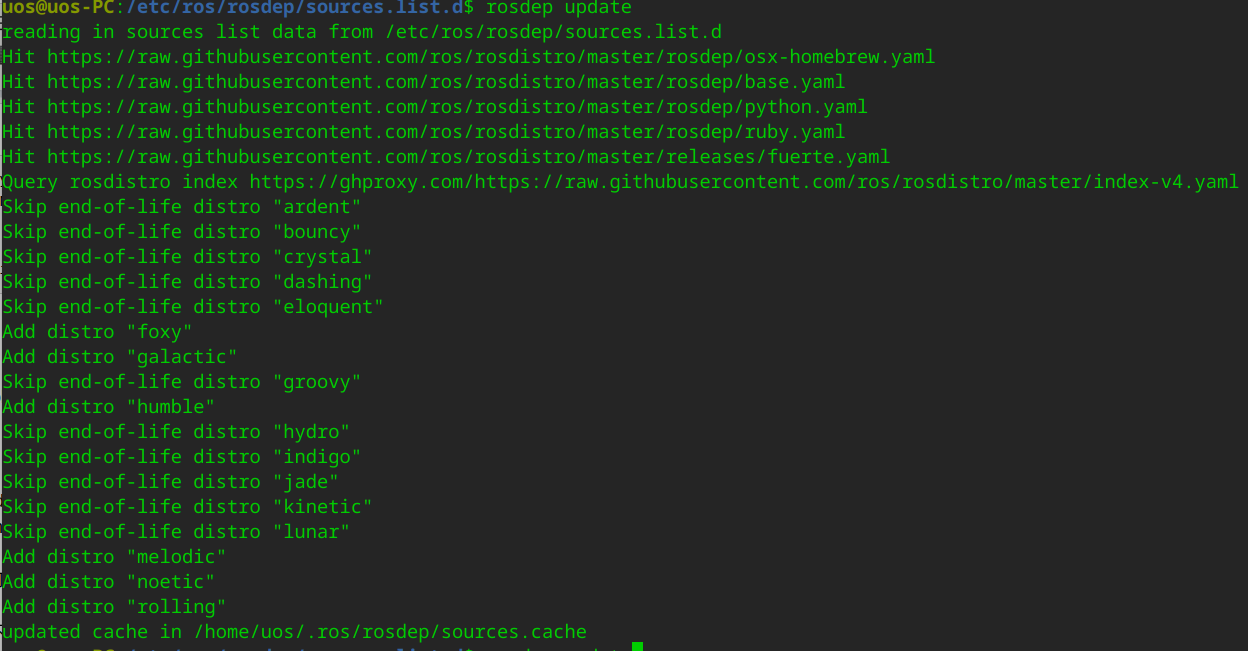
rosdep update
ERROR: error loading sources list:
<urlopen error (https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml)>
可能会出现连接超时这种错误,多运行几次,还可以换阿里云源试试,注意网络环境一定要好。
终极方法-----修改下载源文件。
网站https://ghproxy.com/支持github的资源代理,非常好用,我们将用此代理加速rosdep对Github Raw的访问,进而解决rosdep update超时问题
1、/usr/lib/python2.7/dist-packages/rosdep2/sources_list.py
添加
url = 'https://ghproxy.com/'+url

2、/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
第36行,如下添加:

第204行如下添加:

3、/usr/lib/python2.7/dist-packages/rosdep2/rep3.py
定位到39行,如下添加

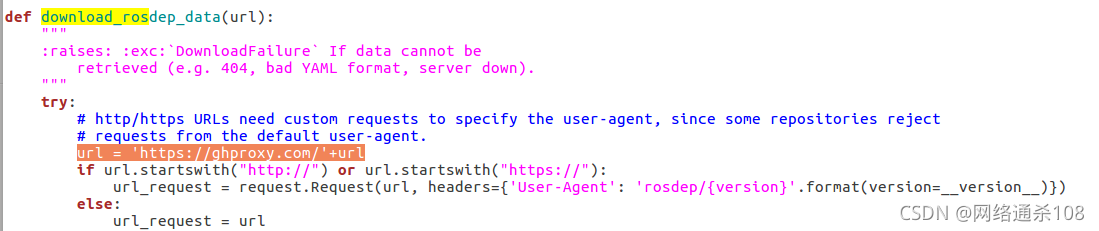
4、/usr/lib/python2.7/dist-packages/rosdistro/__init__.py
定位到68行,修改如下

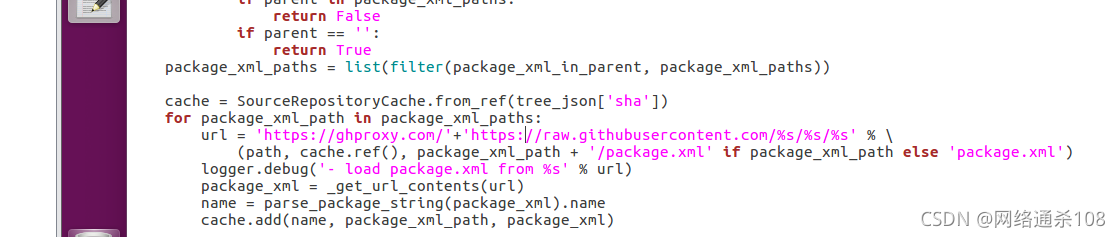
5\ /usr/lib/python2.7/dist-packages/rosdistro/manifest_provider/github.py
定位到68行修改如下

再rosdep update一下,成功!!!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号