
ARM编程模式和7钟工作模式
一. ARM的基本设定
1.1. ARM 采用的是32位架构
1.2. ARM约定:
a. Byte : 8 bits
b. Halfword :16 bits (2 byte)
c. Word : 32 bits (4 byte)
1.3. 大部分ARM core 提供:
a. ARM 指令集(32-bit)
b. Thumb 指令集(16-bit )
c. Thumb2指令集(16 & 32bit)
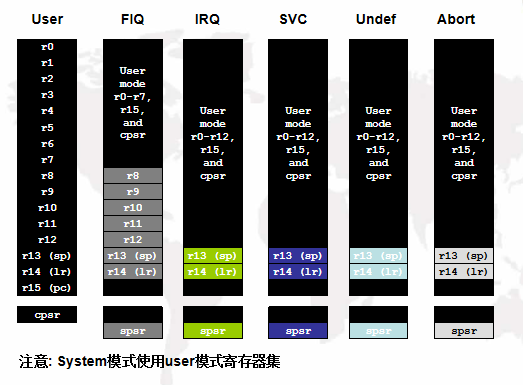
二. ARM处理器工作模式
2.1. ARM 有7个基本工作模式:
User : 非特权模式,大部分任务执行在这种模式
FIQ : 当一个高优先级(fast) 中断产生时将会进入这种模式
IRQ : 当一个低优先级(normal) 中断产生时将会进入这种模式
Supervisor :当复位或软中断指令执行时将会进入这种模式
Abort : 当存取异常时将会进入这种模式
Undef : 当执行未定义指令时会进入这种模式
System : 使用和User模式相同寄存器集的特权模式
注:1.除User(用户模式)是Normal(普通模式)外,其他6种都是Privilege(特权模式)。
2. Privilege中除Sys模式外,其余5种为异常模式
3. 各种模式的切换,可以是程序员通过代码主动切换(通过写CPSR寄存器);也可以是CPU在某些情况下自动切换。
4. 各种模式下权限和可以访问的寄存器不同
三. ARM通用寄存器
3.1. ARM共有37个寄存器,都是32位长度
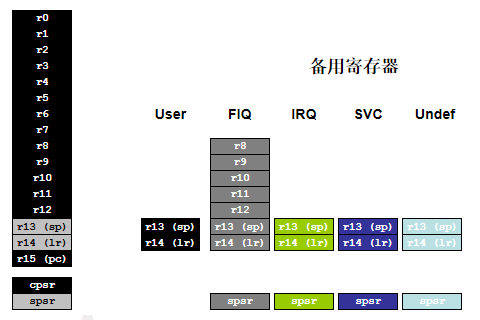
3.2. 不同模式下的寄存器分布
3.3. 寄存器说明
3.3.1. sp指针表示栈指针,是程序工作区。
3.3.2. lr用来做返回控制,用来存储返回值(函数调用返回值)。
3.3.3. pc表示程序控制寄存器,用来存储程序执行在哪。
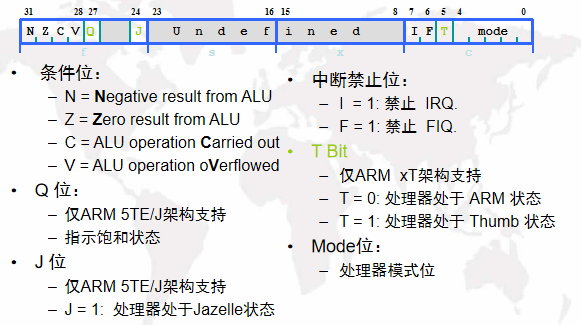
3.3.4. CPSR程序状态寄存器
3.3.5. spsr是用来保存cpsr。(例如:当从USER转换到IRQ模式时,将USER的状态保存到IRQ的spsr中)
四. 异常处理机制机制
4.1. 什么是异常
4.1.1. 异常会打断正在执行的工作,并且一般我们希望异常处理完成后继续回来执行原来的工作
4.1.2. 中断是异常的一种。
4.2. 异常向量表
4.2.1. 所有的CPU都有异常向量表,这是CPU设计时就设定好的,是硬件决定的
4.2.2. 当异常发生时,CPU会自动动作(PC跳转到异常向量处处理异常,有时伴有一些辅助动作)
4.2.3. 异常向量表是硬件向软件提供的处理异常的支持
4.3. 异常处理流程
4.3.1. 当异常产生时, ARM core:
4.3.1.1. 拷贝 CPSR 到 SPSR_<mode> 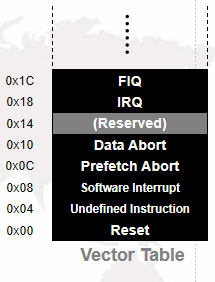
4.3.1.2. 设置适当的 CPSR 位
a. 改变处理器状态进入 ARM 态
b. 改变处理器模式进入相应的异常模式
c. 设置中断禁止位禁止相应中断 (如果需要)
4.3.1.3. 保存返回地址到 LR_<mode>
4.3.1.4. 设置 PC 为相应的异常向量
4.3.2. 返回时, 异常处理需要:
4.3.2.1. 从 SPSR_<mode>恢复CPSR
4.3.2.2. 从LR_<mode>恢复PC
Note: 1.这些操作只能在 ARM 态执行.
2. 以上说的是CPU设计时提供的异常向量表,一般成为一级向量表。有些CPU为了支持多个中断,还会提供二级中断向量表,处理思路类似于这里说的一级中断向量表。
参考《朱老师.1.2ARM裸机课件》

 浙公网安备 33010602011771号
浙公网安备 33010602011771号