

U-Boot启动过程完全分析[zz]
转载地址:http://www.cnblogs.com/heaad/archive/2010/07/17/1779829.html
U-Boot启动内核的过程可以分为两个阶段,两个阶段的功能如下:
(1)第一阶段的功能
Ø 硬件设备初始化
Ø 加载U-Boot第二阶段代码到RAM空间
Ø 设置好栈
Ø 跳转到第二阶段代码入口
(2)第二阶段的功能
Ø 初始化本阶段使用的硬件设备
Ø 检测系统内存映射
Ø 将内核从Flash读取到RAM中
Ø 为内核设置启动参数
Ø 调用内核
1.1.1 U-Boot启动第一阶段代码分析
第一阶段对应的文件是cpu/arm920t/start.S和board/samsung/mini2440/lowlevel_init.S。
U-Boot启动第一阶段流程如下:
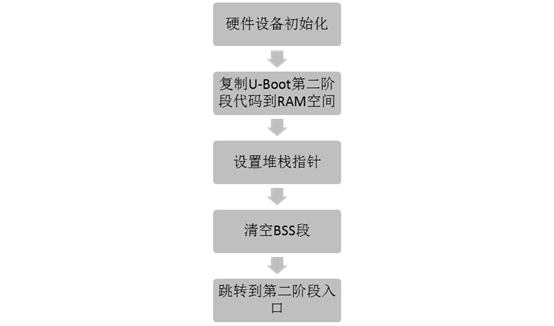
图 2.1 U-Boot启动第一阶段流程
根据cpu/arm920t/u-boot.lds中指定的连接方式:
ENTRY(_start)
SECTIONS
{
. = 0x00000000;
. = ALIGN(4);
.text :
{
cpu/arm920t/start.o (.text)
board/samsung/mini2440/lowlevel_init.o (.text)
board/samsung/mini2440/nand_read.o (.text)
*(.text)
}
… …
}
第一个链接的是cpu/arm920t/start.o,因此u-boot.bin的入口代码在cpu/arm920t/start.o中,其源代码在cpu/arm920t/start.S中。下面我们来分析cpu/arm920t/start.S的执行。
1. 硬件设备初始化
(1)设置异常向量
cpu/arm920t/start.S开头有如下的代码:
.globl _start
_start: b start_code /* 复位 */
ldr pc, _undefined_instruction /* 未定义指令向量 */
ldr pc, _software_interrupt /* 软件中断向量 */
ldr pc, _prefetch_abort /* 预取指令异常向量 */
ldr pc, _data_abort /* 数据操作异常向量 */
ldr pc, _not_used /* 未使用 */
ldr pc, _irq /* irq中断向量 */
ldr pc, _fiq /* fiq中断向量 */
/* 中断向量表入口地址 */
_undefined_instruction: .word undefined_instruction
_software_interrupt: .word software_interrupt
_prefetch_abort: .word prefetch_abort
_data_abort: .word data_abort
_not_used: .word not_used
_irq: .word irq
_fiq: .word fiq
.balignl 16,0xdeadbeef
以上代码设置了ARM异常向量表,各个异常向量介绍如下:
表 2.1 ARM异常向量表
| 地址 | 异常 | 进入模式 | 描述 |
| 0x00000000 | 复位 | 管理模式 | 复位电平有效时,产生复位异常,程序跳转到复位处理程序处执行 |
| 0x00000004 | 未定义指令 | 未定义模式 | 遇到不能处理的指令时,产生未定义指令异常 |
| 0x00000008 | 软件中断 | 管理模式 | 执行SWI指令产生,用于用户模式下的程序调用特权操作指令 |
| 0x0000000c | 预存指令 | 中止模式 | 处理器预取指令的地址不存在,或该地址不允许当前指令访问,产生指令预取中止异常 |
| 0x00000010 | 数据操作 | 中止模式 | 处理器数据访问指令的地址不存在,或该地址不允许当前指令访问时,产生数据中止异常 |
| 0x00000014 | 未使用 | 未使用 | 未使用 |
| 0x00000018 | IRQ | IRQ | 外部中断请求有效,且CPSR中的I位为0时,产生IRQ异常 |
| 0x0000001c | FIQ | FIQ | 快速中断请求引脚有效,且CPSR中的F位为0时,产生FIQ异常 |
在cpu/arm920t/start.S中还有这些异常对应的异常处理程序。当一个异常产生时,CPU根据异常号在异常向量表中找到对应的异常向量,然后执行异常向量处的跳转指令,CPU就跳转到对应的异常处理程序执行。
其中复位异常向量的指令“b start_code”决定了U-Boot启动后将自动跳转到标号“start_code”处执行。
(2)CPU进入SVC模式
start_code:
/*
* set the cpu to SVC32 mode
*/
mrs r0, cpsr
bic r0, r0, #0x1f /*工作模式位清零 */
orr r0, r0, #0xd3 /*工作模式位设置为“10011”(管理模式),并将中断禁止位和快中断禁止位置1 */
msr cpsr, r0
以上代码将CPU的工作模式位设置为管理模式,并将中断禁止位和快中断禁止位置一,从而屏蔽了IRQ和FIQ中断。
(3)设置控制寄存器地址
# if defined(CONFIG_S3C2400)
# define pWTCON 0x15300000
# define INTMSK 0x14400008
# define CLKDIVN 0x14800014
#else /* s3c2410与s3c2440下面4个寄存器地址相同 */
# define pWTCON 0x53000000 /* WATCHDOG控制寄存器地址 */
# define INTMSK 0x4A000008 /* INTMSK寄存器地址 */
# define INTSUBMSK 0x4A00001C /* INTSUBMSK寄存器地址 */
# define CLKDIVN 0x4C000014 /* CLKDIVN寄存器地址 */
# endif
对与s3c2440开发板,以上代码完成了WATCHDOG,INTMSK,INTSUBMSK,CLKDIVN四个寄存器的地址的设置。各个寄存器地址参见参考文献[4] 。
(4)关闭看门狗
ldr r0, =pWTCON
mov r1, #0x0
str r1, [r0] /* 看门狗控制器的最低位为0时,看门狗不输出复位信号 */
以上代码向看门狗控制寄存器写入0,关闭看门狗。否则在U-Boot启动过程中,CPU将不断重启。
(5)屏蔽中断
/*
* mask all IRQs by setting all bits in the INTMR - default
*/
mov r1, #0xffffffff /* 某位被置1则对应的中断被屏蔽 */
ldr r0, =INTMSK
str r1, [r0]
INTMSK是主中断屏蔽寄存器,每一位对应SRCPND(中断源引脚寄存器)中的一位,表明SRCPND相应位代表的中断请求是否被CPU所处理。
根据参考文献4,INTMSK寄存器是一个32位的寄存器,每位对应一个中断,向其中写入0xffffffff就将INTMSK寄存器全部位置一,从而屏蔽对应的中断。
# if defined(CONFIG_S3C2440)
ldr r1, =0x7fff
ldr r0, =INTSUBMSK
str r1, [r0]
# endif
INTSUBMSK每一位对应SUBSRCPND中的一位,表明SUBSRCPND相应位代表的中断请求是否被CPU所处理。
根据参考文献4,INTSUBMSK寄存器是一个32位的寄存器,但是只使用了低15位。向其中写入0x7fff就是将INTSUBMSK寄存器全部有效位(低15位)置一,从而屏蔽对应的中断。
(6)设置MPLLCON,UPLLCON, CLKDIVN
# if defined(CONFIG_S3C2440)
#define MPLLCON 0x4C000004
#define UPLLCON 0x4C000008
ldr r0, =CLKDIVN
mov r1, #5
str r1, [r0]
ldr r0, =MPLLCON
ldr r1, =0x7F021
str r1, [r0]
ldr r0, =UPLLCON
ldr r1, =0x38022
str r1, [r0]
# else
/* FCLK:HCLK:PCLK = 1:2:4 */
/* default FCLK is 120 MHz ! */
ldr r0, =CLKDIVN
mov r1, #3
str r1, [r0]
#endif
CPU上电几毫秒后,晶振输出稳定,FCLK=Fin(晶振频率),CPU开始执行指令。但实际上,FCLK可以高于Fin,为了提高系统时钟,需要用软件来启用PLL。这就需要设置CLKDIVN,MPLLCON,UPLLCON这3个寄存器。
CLKDIVN寄存器用于设置FCLK,HCLK,PCLK三者间的比例,可以根据表2.2来设置。
表 2.2 S3C2440 的CLKDIVN寄存器格式
| CLKDIVN | 位 | 说明 | 初始值 |
| HDIVN | [2:1] | 00 : HCLK = FCLK/1. 01 : HCLK = FCLK/2. 10 : HCLK = FCLK/4 (当 CAMDIVN[9] = 0 时) HCLK= FCLK/8 (当 CAMDIVN[9] = 1 时) 11 : HCLK = FCLK/3 (当 CAMDIVN[8] = 0 时) HCLK = FCLK/6 (当 CAMDIVN[8] = 1时) | 00 |
| PDIVN | [0] | 0: PCLK = HCLK/1 1: PCLK = HCLK/2 | 0 |
设置CLKDIVN为5,就将HDIVN设置为二进制的10,由于CAMDIVN[9]没有被改变过,取默认值0,因此HCLK = FCLK/4。PDIVN被设置为1,因此PCLK= HCLK/2。因此分频比FCLK:HCLK:PCLK = 1:4:8 。
MPLLCON寄存器用于设置FCLK与Fin的倍数。MPLLCON的位[19:12]称为MDIV,位[9:4]称为PDIV,位[1:0]称为SDIV。
对于S3C2440,FCLK与Fin的关系如下面公式:
MPLL(FCLK) = (2×m×Fin)/(p×)
其中: m=MDIC+8,p=PDIV+2,s=SDIV
MPLLCON与UPLLCON的值可以根据参考文献4中“PLL VALUE SELECTION TABLE”设置。该表部分摘录如下:
表 2.3 推荐PLL值
| 输入频率 | 输出频率 | MDIV | PDIV | SDIV |
| 12.0000MHz | 48.00 MHz | 56(0x38) | 2 | 2 |
| 12.0000MHz | 405.00 MHz | 127(0x7f) | 2 | 1 |
当mini2440系统主频设置为405MHZ,USB时钟频率设置为48MHZ时,系统可以稳定运行,因此设置MPLLCON与UPLLCON为:
MPLLCON=(0x7f<<12) | (0x02<<4) | (0x01) = 0x7f021
UPLLCON=(0x38<<12) | (0x02<<4) | (0x02) = 0x38022
(7)关闭MMU,cache
接着往下看:
#ifndef CONFIG_SKIP_LOWLEVEL_INIT
bl cpu_init_crit
#endif
cpu_init_crit这段代码在U-Boot正常启动时才需要执行,若将U-Boot从RAM中启动则应该注释掉这段代码。
下面分析一下cpu_init_crit到底做了什么:
320 #ifndef CONFIG_SKIP_LOWLEVEL_INIT
321 cpu_init_crit:
322 /*
323 * 使数据cache与指令cache无效 */
324 */
325 mov r0, #0
326 mcr p15, 0, r0, c7, c7, 0 /* 向c7写入0将使ICache与DCache无效*/
327 mcr p15, 0, r0, c8, c7, 0 /* 向c8写入0将使TLB失效 */
328
329 /*
330 * disable MMU stuff and caches
331 */
332 mrc p15, 0, r0, c1, c0, 0 /* 读出控制寄存器到r0中 */
333 bic r0, r0, #0x00002300 @ clear bits 13, 9:8 (--V- --RS)
334 bic r0, r0, #0x00000087 @ clear bits 7, 2:0 (B--- -CAM)
335 orr r0, r0, #0x00000002 @ set bit 2 (A) Align
336 orr r0, r0, #0x00001000 @ set bit 12 (I) I-Cache
337 mcr p15, 0, r0, c1, c0, 0 /* 保存r0到控制寄存器 */
338
339 /*
340 * before relocating, we have to setup RAM timing
341 * because memory timing is board-dependend, you will
342 * find a lowlevel_init.S in your board directory.
343 */
344 mov ip, lr
345
346 bl lowlevel_init
347
348 mov lr, ip
349 mov pc, lr
350 #endif /* CONFIG_SKIP_LOWLEVEL_INIT */
代码中的c0,c1,c7,c8都是ARM920T的协处理器CP15的寄存器。其中c7是cache控制寄存器,c8是TLB控制寄存器。325~327行代码将0写入c7、c8,使Cache,TLB内容无效。
第332~337行代码关闭了MMU。这是通过修改CP15的c1寄存器来实现的,先看CP15的c1寄存器的格式(仅列出代码中用到的位):
表 2.3 CP15的c1寄存器格式(部分)
| 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
| . | . | V | I | . | . | R | S | B | . | . | . | . | C | A | M |
各个位的意义如下:
V : 表示异常向量表所在的位置,0:异常向量在0x00000000;1:异常向量在 0xFFFF0000
I : 0 :关闭ICaches;1 :开启ICaches
R、S : 用来与页表中的描述符一起确定内存的访问权限
B : 0 :CPU为小字节序;1 : CPU为大字节序
C : 0:关闭DCaches;1:开启DCaches
A : 0:数据访问时不进行地址对齐检查;1:数据访问时进行地址对齐检查
M : 0:关闭MMU;1:开启MMU
332~337行代码将c1的 M位置零,关闭了MMU。
(8)初始化RAM控制寄存器
其中的lowlevel_init就完成了内存初始化的工作,由于内存初始化是依赖于开发板的,因此lowlevel_init的代码一般放在board下面相应的目录中。对于mini2440,lowlevel_init在board/samsung/mini2440/lowlevel_init.S中定义如下:
45 #define BWSCON 0x48000000 /* 13个存储控制器的开始地址 */
… …
129 _TEXT_BASE:
130 .word TEXT_BASE
131
132 .globl lowlevel_init
133 lowlevel_init:
134 /* memory control configuration */
135 /* make r0 relative the current location so that it */
136 /* reads SMRDATA out of FLASH rather than memory ! */
137 ldr r0, =SMRDATA
138 ldr r1, _TEXT_BASE
139 sub r0, r0, r1 /* SMRDATA减 _TEXT_BASE就是13个寄存器的偏移地址 */
140 ldr r1, =BWSCON /* Bus Width Status Controller */
141 add r2, r0, #13*4
142 0:
143 ldr r3, [r0], #4 /*将13个寄存器的值逐一赋值给对应的寄存器*/
144 str r3, [r1], #4
145 cmp r2, r0
146 bne 0b
147
148 /* everything is fine now */
149 mov pc, lr
150
151 .ltorg
152 /* the literal pools origin */
153
154 SMRDATA: /* 下面是13个寄存器的值 */
155 .word … …
156 .word … …
… …
lowlevel_init初始化了13个寄存器来实现RAM时钟的初始化。lowlevel_init函数对于U-Boot从NAND Flash或NOR Flash启动的情况都是有效的。
U-Boot.lds链接脚本有如下代码:
.text :
{
cpu/arm920t/start.o (.text)
board/samsung/mini2440/lowlevel_init.o (.text)
board/samsung/mini2440/nand_read.o (.text)
… …
}
board/samsung/mini2440/lowlevel_init.o将被链接到cpu/arm920t/start.o后面,因此board/samsung/mini2440/lowlevel_init.o也在U-Boot的前4KB的代码中。
U-Boot在NAND Flash启动时,lowlevel_init.o将自动被读取到CPU内部4KB的内部RAM中。因此第137~146行的代码将从CPU内部RAM中复制寄存器的值到相应的寄存器中。
对于U-Boot在NOR Flash启动的情况,由于U-Boot连接时确定的地址是U-Boot在内存中的地址,而此时U-Boot还在NOR Flash中,因此还需要在NOR Flash中读取数据到RAM中。
由于NOR Flash的开始地址是0,而U-Boot的加载到内存的起始地址是TEXT_BASE,SMRDATA标号在Flash的地址就是SMRDATA-TEXT_BASE。
综上所述,lowlevel_init的作用就是将SMRDATA开始的13个值复制给开始地址[BWSCON]的13个寄存器,从而完成了存储控制器的设置。
(9)复制U-Boot第二阶段代码到RAM
cpu/arm920t/start.S原来的代码是只支持从NOR Flash启动的,经过修改现在U-Boot在NOR Flash和NAND Flash上都能启动了,实现的思路是这样的:
bl bBootFrmNORFlash /* 判断U-Boot是在NAND Flash还是NOR Flash启动 */
cmp r0, #0 /* r0存放bBootFrmNORFlash函数返回值,若返回0表示NAND Flash启动,否则表示在NOR Flash启动 */
beq nand_boot /* 跳转到NAND Flash启动代码 */
/* NOR Flash启动的代码 */
b stack_setup /* 跳过NAND Flash启动的代码 */
nand_boot:
/* NAND Flash启动的代码 */
stack_setup:
/* 其他代码 */
其中bBootFrmNORFlash函数作用是判断U-Boot是在NAND Flash启动还是NOR Flash启动,若在NOR Flash启动则返回1,否则返回0。根据ATPCS规则,函数返回值会被存放在r0寄存器中,因此调用bBootFrmNORFlash函数后根据r0的值就可以判断U-Boot在NAND Flash启动还是NOR Flash启动。bBootFrmNORFlash函数在board/samsung/mini2440/nand_read.c中定义如下:
int bBootFrmNORFlash(void)
{
volatile unsigned int *pdw = (volatile unsigned int *)0;
unsigned int dwVal;
dwVal = *pdw; /* 先记录下原来的数据 */
*pdw = 0x12345678;
if (*pdw != 0x12345678) /* 写入失败,说明是在NOR Flash启动 */
{
return 1;
}
else /* 写入成功,说明是在NAND Flash启动 */
{
*pdw = dwVal; /* 恢复原来的数据 */
return 0;
}
}
无论是从NOR Flash还是从NAND Flash启动,地址0处为U-Boot的第一条指令“ b start_code”。
对于从NAND Flash启动的情况,其开始4KB的代码会被自动复制到CPU内部4K内存中,因此可以通过直接赋值的方法来修改。
对于从NOR Flash启动的情况,NOR Flash的开始地址即为0,必须通过一定的命令序列才能向NOR Flash中写数据,所以可以根据这点差别来分辨是从NAND Flash还是NOR Flash启动:向地址0写入一个数据,然后读出来,如果发现写入失败的就是NOR Flash,否则就是NAND Flash。
下面来分析NOR Flash启动部分代码:
208 adr r0, _start /* r0 <- current position of code */
209 ldr r1, _TEXT_BASE /* test if we run from flash or RAM */
/* 判断U-Boot是否是下载到RAM中运行,若是,则不用 再复制到RAM中了,这种情况通常在调试U-Boot时才发生 */
210 cmp r0, r1 /*_start等于_TEXT_BASE说明是下载到RAM中运行 */
211 beq stack_setup
212 /* 以下直到nand_boot标号前都是NOR Flash启动的代码 */
213 ldr r2, _armboot_start
214 ldr r3, _bss_start
215 sub r2, r3, r2 /* r2 <- size of armboot */
216 add r2, r0, r2 /* r2 <- source end address */
217 /* 搬运U-Boot自身到RAM中*/
218 copy_loop:
219 ldmia r0!, {r3-r10} /* 从地址为[r0]的NOR Flash中读入8个字的数据 */
220 stmia r1!, {r3-r10} /* 将r3至r10寄存器的数据复制给地址为[r1]的内存 */
221 cmp r0, r2 /* until source end addreee [r2] */
222 ble copy_loop
223 b stack_setup /* 跳过NAND Flash启动的代码 */
下面再来分析NAND Flash启动部分代码:
nand_boot:
mov r1, #NAND_CTL_BASE
ldr r2, =( (7<<12)|(7<<8)|(7<<4)|(0<<0) )
str r2, [r1, #oNFCONF] /* 设置NFCONF寄存器 */
/* 设置NFCONT,初始化ECC编/解码器,禁止NAND Flash片选 */
ldr r2, =( (1<<4)|(0<<1)|(1<<0) )
str r2, [r1, #oNFCONT]
ldr r2, =(0x6) /* 设置NFSTAT */
str r2, [r1, #oNFSTAT]
/* 复位命令,第一次使用NAND Flash前复位 */
mov r2, #0xff
strb r2, [r1, #oNFCMD]
mov r3, #0
/* 为调用C函数nand_read_ll准备堆栈 */
ldr sp, DW_STACK_START
mov fp, #0
/* 下面先设置r0至r2,然后调用nand_read_ll函数将U-Boot读入RAM */
ldr r0, =TEXT_BASE /* 目的地址:U-Boot在RAM的开始地址 */
mov r1, #0x0 /* 源地址:U-Boot在NAND Flash中的开始地址 */
mov r2, #0x30000 /* 复制的大小,必须比u-boot.bin文件大,并且必须是NAND Flash块大小的整数倍,这里设置为0x30000(192KB) */
bl nand_read_ll /* 跳转到nand_read_ll函数,开始复制U-Boot到RAM */
tst r0, #0x0 /* 检查返回值是否正确 */
beq stack_setup
bad_nand_read:
loop2: b loop2 //infinite loop
.align 2
DW_STACK_START: .word STACK_BASE+STACK_SIZE-4
其中NAND_CTL_BASE,oNFCONF等在include/configs/mini2440.h中定义如下:
#define NAND_CTL_BASE 0x4E000000 // NAND Flash控制寄存器基址
#define STACK_BASE 0x33F00000 //base address of stack
#define STACK_SIZE 0x8000 //size of stack
#define oNFCONF 0x00 /* NFCONF相对于NAND_CTL_BASE偏移地址 */
#define oNFCONT 0x04 /* NFCONT相对于NAND_CTL_BASE偏移地址*/
#define oNFADDR 0x0c /* NFADDR相对于NAND_CTL_BASE偏移地址*/
#define oNFDATA 0x10 /* NFDATA相对于NAND_CTL_BASE偏移地址*/
#define oNFCMD 0x08 /* NFCMD相对于NAND_CTL_BASE偏移地址*/
#define oNFSTAT 0x20 /* NFSTAT相对于NAND_CTL_BASE偏移地址*/
#define oNFECC 0x2c /* NFECC相对于NAND_CTL_BASE偏移地址*/
NAND Flash各个控制寄存器的设置在S3C2440的数据手册有详细说明,这里就不介绍了。
代码中nand_read_ll函数的作用是在NAND Flash中搬运U-Boot到RAM,该函数在board/samsung/mini2440/nand_read.c中定义。
NAND Flash根据page大小可分为2种: 512B/page和2048B/page的。这两种NAND Flash的读操作是不同的。因此就需要U-Boot识别到NAND Flash的类型,然后采用相应的读操作,也就是说nand_read_ll函数要能自动适应两种NAND Flash。
参考S3C2440的数据手册可以知道:根据NFCONF寄存器的Bit3(AdvFlash (Read only))和Bit2 (PageSize (Read only))可以判断NAND Flash的类型。Bit2、Bit3与NAND Flash的block类型的关系如下表所示:
表 2.4 NFCONF的Bit3、Bit2与NAND Flash的关系
| Bit2 Bit3 | 0 | 1 |
| 0 | 256 B/page | 512 B/page |
| 1 | 1024 B/page | 2048 B/page |
由于的NAND Flash只有512B/page和2048 B/page这两种,因此根据NFCONF寄存器的Bit3即可区分这两种NAND Flash了。
完整代码见board/samsung/mini2440/nand_read.c中的nand_read_ll函数,这里给出伪代码:
int nand_read_ll(unsigned char *buf, unsigned long start_addr, int size)
{
//根据NFCONF寄存器的Bit3来区分2种NAND Flash
if( NFCONF & 0x8 ) /* Bit是1,表示是2KB/page的NAND Flash */
{
////////////////////////////////////
读取2K block 的NAND Flash
////////////////////////////////////
}
else /* Bit是0,表示是512B/page的NAND Flash */
{
/////////////////////////////////////
读取512B block 的NAND Flash
/////////////////////////////////////
}
return 0;
}
(10)设置堆栈
/* 设置堆栈 */
stack_setup:
ldr r0, _TEXT_BASE /* upper 128 KiB: relocated uboot */
sub r0, r0, #CONFIG_SYS_MALLOC_LEN /* malloc area */
sub r0, r0, #CONFIG_SYS_GBL_DATA_SIZE /* 跳过全局数据区 */
#ifdef CONFIG_USE_IRQ
sub r0, r0, #(CONFIG_STACKSIZE_IRQ+CONFIG_STACKSIZE_FIQ)
#endif
sub sp, r0, #12 /* leave 3 words for abort-stack */
只要将sp指针指向一段没有被使用的内存就完成栈的设置了。根据上面的代码可以知道U-Boot内存使用情况了,如下图所示:

图2.2 U-Boot内存使用情况
(11)清除BSS段
clear_bss:
ldr r0, _bss_start /* BSS段开始地址,在u-boot.lds中指定*/
ldr r1, _bss_end /* BSS段结束地址,在u-boot.lds中指定*/
mov r2, #0x00000000
clbss_l:str r2, [r0] /* 将bss段清零*/
add r0, r0, #4
cmp r0, r1
ble clbss_l
初始值为0,无初始值的全局变量,静态变量将自动被放在BSS段。应该将这些变量的初始值赋为0,否则这些变量的初始值将是一个随机的值,若有些程序直接使用这些没有初始化的变量将引起未知的后果。
(12)跳转到第二阶段代码入口
ldr pc, _start_armboot
_start_armboot: .word start_armboot
跳转到第二阶段代码入口start_armboot处。
1.1.2 U-Boot启动第二阶段代码分析
start_armboot函数在lib_arm/board.c中定义,是U-Boot第二阶段代码的入口。U-Boot启动第二阶段流程如下:

图 2.3 U-Boot第二阶段执行流程
在分析start_armboot函数前先来看看一些重要的数据结构:
(1)gd_t结构体
U-Boot使用了一个结构体gd_t来存储全局数据区的数据,这个结构体在include/asm-arm/global_data.h中定义如下:
typedef struct global_data {
bd_t *bd;
unsigned long flags;
unsigned long baudrate;
unsigned long have_console; /* serial_init() was called */
unsigned long env_addr; /* Address of Environment struct */
unsigned long env_valid; /* Checksum of Environment valid? */
unsigned long fb_base; /* base address of frame buffer */
void **jt; /* jump table */
} gd_t;
U-Boot使用了一个存储在寄存器中的指针gd来记录全局数据区的地址:
#define DECLARE_GLOBAL_DATA_PTR register volatile gd_t *gd asm ("r8")
DECLARE_GLOBAL_DATA_PTR定义一个gd_t全局数据结构的指针,这个指针存放在指定的寄存器r8中。这个声明也避免编译器把r8分配给其它的变量。任何想要访问全局数据区的代码,只要代码开头加入“DECLARE_GLOBAL_DATA_PTR”一行代码,然后就可以使用gd指针来访问全局数据区了。
根据U-Boot内存使用图中可以计算gd的值:
gd = TEXT_BASE -CONFIG_SYS_MALLOC_LEN - sizeof(gd_t)
(2)bd_t结构体
bd_t在include/asm-arm.u/u-boot.h中定义如下:
typedef struct bd_info {
int bi_baudrate; /* 串口通讯波特率 */
unsigned long bi_ip_addr; /* IP 地址*/
struct environment_s *bi_env; /* 环境变量开始地址 */
ulong bi_arch_number; /* 开发板的机器码 */
ulong bi_boot_params; /* 内核参数的开始地址 */
struct /* RAM配置信息 */
{
ulong start;
ulong size;
}bi_dram[CONFIG_NR_DRAM_BANKS];
} bd_t;
U-Boot启动内核时要给内核传递参数,这时就要使用gd_t,bd_t结构体中的信息来设置标记列表。
(3)init_sequence数组
U-Boot使用一个数组init_sequence来存储对于大多数开发板都要执行的初始化函数的函数指针。init_sequence数组中有较多的编译选项,去掉编译选项后init_sequence数组如下所示:
typedef int (init_fnc_t) (void);
init_fnc_t *init_sequence[] = {
board_init, /*开发板相关的配置--board/samsung/mini2440/mini2440.c */
timer_init, /* 时钟初始化-- cpu/arm920t/s3c24x0/timer.c */
env_init, /*初始化环境变量--common/env_flash.c 或common/env_nand.c*/
init_baudrate, /*初始化波特率-- lib_arm/board.c */
serial_init, /* 串口初始化-- drivers/serial/serial_s3c24x0.c */
console_init_f, /* 控制通讯台初始化阶段1-- common/console.c */
display_banner, /*打印U-Boot版本、编译的时间-- gedit lib_arm/board.c */
dram_init, /*配置可用的RAM-- board/samsung/mini2440/mini2440.c */
display_dram_config, /* 显示RAM大小-- lib_arm/board.c */
NULL,
};
其中的board_init函数在board/samsung/mini2440/mini2440.c中定义,该函数设置了MPLLCOM,UPLLCON,以及一些GPIO寄存器的值,还设置了U-Boot机器码和内核启动参数地址 :
/* MINI2440开发板的机器码 */
gd->bd->bi_arch_number = MACH_TYPE_MINI2440;
/* 内核启动参数地址 */
gd->bd->bi_boot_params = 0x30000100;
其中的dram_init函数在board/samsung/mini2440/mini2440.c中定义如下:
int dram_init (void)
{
/* 由于mini2440只有 */
gd->bd->bi_dram[0].start = PHYS_SDRAM_1;
gd->bd->bi_dram[0].size = PHYS_SDRAM_1_SIZE;
return 0;
}
mini2440使用2片32MB的SDRAM组成了64MB的内存,接在存储控制器的BANK6,地址空间是0x30000000~0x34000000。
在include/configs/mini2440.h中PHYS_SDRAM_1和PHYS_SDRAM_1_SIZE 分别被定义为0x30000000和0x04000000(64M)。
分析完上述的数据结构,下面来分析start_armboot函数:
void start_armboot (void)
{
init_fnc_t **init_fnc_ptr;
char *s;
… …
/* 计算全局数据结构的地址gd */
gd = (gd_t*)(_armboot_start - CONFIG_SYS_MALLOC_LEN - sizeof(gd_t));
… …
memset ((void*)gd, 0, sizeof (gd_t));
gd->bd = (bd_t*)((char*)gd - sizeof(bd_t));
memset (gd->bd, 0, sizeof (bd_t));
gd->flags |= GD_FLG_RELOC;
monitor_flash_len = _bss_start - _armboot_start;
/* 逐个调用init_sequence数组中的初始化函数 */
for (init_fnc_ptr = init_sequence; *init_fnc_ptr; ++init_fnc_ptr) {
if ((*init_fnc_ptr)() != 0) {
hang ();
}
}
/* armboot_start 在cpu/arm920t/start.S 中被初始化为u-boot.lds连接脚本中的_start */
mem_malloc_init (_armboot_start - CONFIG_SYS_MALLOC_LEN,
CONFIG_SYS_MALLOC_LEN);
/* NOR Flash初始化 */
#ifndef CONFIG_SYS_NO_FLASH
/* configure available FLASH banks */
display_flash_config (flash_init ());
#endif /* CONFIG_SYS_NO_FLASH */
… …
/* NAND Flash 初始化*/
#if defined(CONFIG_CMD_NAND)
puts ("NAND: ");
nand_init(); /* go init the NAND */
#endif
… …
/*配置环境变量,重新定位 */
env_relocate ();
… …
/* 从环境变量中获取IP地址 */
gd->bd->bi_ip_addr = getenv_IPaddr ("ipaddr");
stdio_init (); /* get the devices list going. */
jumptable_init ();
… …
console_init_r (); /* fully init console as a device */
… …
/* enable exceptions */
enable_interrupts ();
#ifdef CONFIG_USB_DEVICE
usb_init_slave();
#endif
/* Initialize from environment */
if ((s = getenv ("loadaddr")) != NULL) {
load_addr = simple_strtoul (s, NULL, 16);
}
#if defined(CONFIG_CMD_NET)
if ((s = getenv ("bootfile")) != NULL) {
copy_filename (BootFile, s, sizeof (BootFile));
}
#endif
… …
/* 网卡初始化 */
#if defined(CONFIG_CMD_NET)
#if defined(CONFIG_NET_MULTI)
puts ("Net: ");
#endif
eth_initialize(gd->bd);
… …
#endif
/* main_loop() can return to retry autoboot, if so just run it again. */
for (;;) {
main_loop ();
}
/* NOTREACHED - no way out of command loop except booting */
}
main_loop函数在common/main.c中定义。一般情况下,进入main_loop函数若干秒内没有
1.1.3 U-Boot启动Linux过程
U-Boot使用标记列表(tagged list)的方式向Linux传递参数。标记的数据结构式是tag,在U-Boot源代码目录include/asm-arm/setup.h中定义如下:
struct tag_header {
u32 size; /* 表示tag数据结构的联合u实质存放的数据的大小*/
u32 tag; /* 表示标记的类型 */
};
struct tag {
struct tag_header hdr;
union {
struct tag_core core;
struct tag_mem32 mem;
struct tag_videotext videotext;
struct tag_ramdisk ramdisk;
struct tag_initrd initrd;
struct tag_serialnr serialnr;
struct tag_revision revision;
struct tag_videolfb videolfb;
struct tag_cmdline cmdline;
/*
* Acorn specific
*/
struct tag_acorn acorn;
/*
* DC21285 specific
*/
struct tag_memclk memclk;
} u;
};
U-Boot使用命令bootm来启动已经加载到内存中的内核。而bootm命令实际上调用的是do_bootm函数。对于Linux内核,do_bootm函数会调用do_bootm_linux函数来设置标记列表和启动内核。do_bootm_linux函数在lib_arm/bootm.c 中定义如下:
59 int do_bootm_linux(int flag, int argc, char *argv[], bootm_headers_t *images)
60 {
61 bd_t *bd = gd->bd;
62 char *s;
63 int machid = bd->bi_arch_number;
64 void (*theKernel)(int zero, int arch, uint params);
65
66 #ifdef CONFIG_CMDLINE_TAG
67 char *commandline = getenv ("bootargs"); /* U-Boot环境变量bootargs */
68 #endif
… …
73 theKernel = (void (*)(int, int, uint))images->ep; /* 获取内核入口地址 */
… …
86 #if defined (CONFIG_SETUP_MEMORY_TAGS) || \
87 defined (CONFIG_CMDLINE_TAG) || \
88 defined (CONFIG_INITRD_TAG) || \
89 defined (CONFIG_SERIAL_TAG) || \
90 defined (CONFIG_REVISION_TAG) || \
91 defined (CONFIG_LCD) || \
92 defined (CONFIG_VFD)
93 setup_start_tag (bd); /* 设置ATAG_CORE标志 */
… …
100 #ifdef CONFIG_SETUP_MEMORY_TAGS
101 setup_memory_tags (bd); /* 设置内存标记 */
102 #endif
103 #ifdef CONFIG_CMDLINE_TAG
104 setup_commandline_tag (bd, commandline); /* 设置命令行标记 */
105 #endif
… …
113 setup_end_tag (bd); /* 设置ATAG_NONE标志 */
114 #endif
115
116 /* we assume that the kernel is in place */
117 printf ("\nStarting kernel ...\n\n");
… …
126 cleanup_before_linux (); /* 启动内核前对CPU作最后的设置 */
127
128 theKernel (0, machid, bd->bi_boot_params); /* 调用内核 */
129 /* does not return */
130
131 return 1;
132 }
其中的setup_start_tag,setup_memory_tags,setup_end_tag函数在lib_arm/bootm.c中定义如下:
(1)setup_start_tag函数
static void setup_start_tag (bd_t *bd)
{
params = (struct tag *) bd->bi_boot_params; /* 内核的参数的开始地址 */
params->hdr.tag = ATAG_CORE;
params->hdr.size = tag_size (tag_core);
params->u.core.flags = 0;
params->u.core.pagesize = 0;
params->u.core.rootdev = 0;
params = tag_next (params);
}
标记列表必须以ATAG_CORE开始,setup_start_tag函数在内核的参数的开始地址设置了一个ATAG_CORE标记。
(2)setup_memory_tags函数
static void setup_memory_tags (bd_t *bd)
{
int i;
/*设置一个内存标记 */
for (i = 0; i < CONFIG_NR_DRAM_BANKS; i++) {
params->hdr.tag = ATAG_MEM;
params->hdr.size = tag_size (tag_mem32);
params->u.mem.start = bd->bi_dram[i].start;
params->u.mem.size = bd->bi_dram[i].size;
params = tag_next (params);
}
}
setup_memory_tags函数设置了一个ATAG_MEM标记,该标记包含内存起始地址,内存大小这两个参数。
(3)setup_end_tag函数
static void setup_end_tag (bd_t *bd)
{
params->hdr.tag = ATAG_NONE;
params->hdr.size = 0;
}
标记列表必须以标记ATAG_NONE结束,setup_end_tag函数设置了一个ATAG_NONE标记,表示标记列表的结束。
U-Boot设置好标记列表后就要调用内核了。但调用内核前,CPU必须满足下面的条件:
(1) CPU寄存器的设置
Ø r0=0
Ø r1=机器码
Ø r2=内核参数标记列表在RAM中的起始地址
(2) CPU工作模式
Ø 禁止IRQ与FIQ中断
Ø CPU为SVC模式
(3) 使数据Cache与指令Cache失效
do_bootm_linux中调用的cleanup_before_linux函数完成了禁止中断和使Cache失效的功能。cleanup_before_linux函数在cpu/arm920t/cpu.中定义:
int cleanup_before_linux (void)
{
/*
* this function is called just before we call linux
* it prepares the processor for linux
*
* we turn off caches etc ...
*/
disable_interrupts (); /* 禁止FIQ/IRQ中断 */
/* turn off I/D-cache */
icache_disable(); /* 使指令Cache失效 */
dcache_disable(); /* 使数据Cache失效 */
/* flush I/D-cache */
cache_flush(); /* 刷新Cache */
return 0;
}
由于U-Boot启动以来就一直工作在SVC模式,因此CPU的工作模式就无需设置了。
do_bootm_linux中:
64 void (*theKernel)(int zero, int arch, uint params);
… …
73 theKernel = (void (*)(int, int, uint))images->ep;
… …
128 theKernel (0, machid, bd->bi_boot_params);
第73行代码将内核的入口地址“images->ep”强制类型转换为函数指针。根据ATPCS规则,函数的参数个数不超过4个时,使用r0~r3这4个寄存器来传递参数。因此第128行的函数调用则会将0放入r0,机器码machid放入r1,内核参数地址bd->bi_boot_params放入r2,从而完成了寄存器的设置,最后转到内核的入口地址。
到这里,U-Boot的工作就结束了,系统跳转到Linux内核代码执行。
1.1.4 U-Boot添加命令的方法及U-Boot命令执行过程
下面以添加menu命令(启动菜单)为例讲解U-Boot添加命令的方法。
(1) 建立common/cmd_menu.c
习惯上通用命令源代码放在common目录下,与开发板专有命令源代码则放在board/<board_dir>目录下,并且习惯以“cmd_<命令名>.c”为文件名。
(2) 定义“menu”命令
在cmd_menu.c中使用如下的代码定义“menu”命令:
_BOOT_CMD(
menu, 3, 0, do_menu,
"menu - display a menu, to select the items to do something\n",
" - display a menu, to select the items to do something"
);
其中U_BOOT_CMD命令格式如下:
U_BOOT_CMD(name,maxargs,rep,cmd,usage,help)
各个参数的意义如下:
name:命令名,非字符串,但在U_BOOT_CMD中用“#”符号转化为字符串
maxargs:命令的最大参数个数
rep:是否自动重复(按Enter键是否会重复执行)
cmd:该命令对应的响应函数
usage:简短的使用说明(字符串)
help:较详细的使用说明(字符串)
在内存中保存命令的help字段会占用一定的内存,通过配置U-Boot可以选择是否保存help字段。若在include/configs/mini2440.h中定义了CONFIG_SYS_LONGHELP宏,则在U-Boot中使用help命令查看某个命令的帮助信息时将显示usage和help字段的内容,否则就只显示usage字段的内容。
U_BOOT_CMD宏在include/command.h中定义:
#define U_BOOT_CMD(name,maxargs,rep,cmd,usage,help) \
cmd_tbl_t __u_boot_cmd_##name Struct_Section = {#name, maxargs, rep, cmd, usage, help}
“##”与“#”都是预编译操作符,“##”有字符串连接的功能,“#”表示后面紧接着的是一个字符串。
其中的cmd_tbl_t在include/command.h中定义如下:
struct cmd_tbl_s {
char *name; /* 命令名 */
int maxargs; /* 最大参数个数 */
int repeatable; /* 是否自动重复 */
int (*cmd)(struct cmd_tbl_s *, int, int, char *[]); /* 响应函数 */
char *usage; /* 简短的帮助信息 */
#ifdef CONFIG_SYS_LONGHELP
char *help; /* 较详细的帮助信息 */
#endif
#ifdef CONFIG_AUTO_COMPLETE
/* 自动补全参数 */
int (*complete)(int argc, char *argv[], char last_char, int maxv, char *cmdv[]);
#endif
};
typedef struct cmd_tbl_s cmd_tbl_t;
一个cmd_tbl_t结构体变量包含了调用一条命令的所需要的信息。
其中Struct_Section在include/command.h中定义如下:
#define Struct_Section __attribute__ ((unused,section (".u_boot_cmd")))
凡是带有__attribute__ ((unused,section (".u_boot_cmd"))属性声明的变量都将被存放在".u_boot_cmd"段中,并且即使该变量没有在代码中显式的使用编译器也不产生警告信息。
在U-Boot连接脚本u-boot.lds中定义了".u_boot_cmd"段:
. = .;
__u_boot_cmd_start = .; /*将 __u_boot_cmd_start指定为当前地址 */
.u_boot_cmd : { *(.u_boot_cmd) }
__u_boot_cmd_end = .; /* 将__u_boot_cmd_end指定为当前地址 */
这表明带有“.u_boot_cmd”声明的函数或变量将存储在“u_boot_cmd”段。这样只要将U-Boot所有命令对应的cmd_tbl_t变量加上“.u_boot_cmd”声明,编译器就会自动将其放在“u_boot_cmd”段,查找cmd_tbl_t变量时只要在__u_boot_cmd_start与__u_boot_cmd_end之间查找就可以了。
因此“menu”命令的定义经过宏展开后如下:
cmd_tbl_t __u_boot_cmd_menu __attribute__ ((unused,section (".u_boot_cmd"))) = {menu, 3, 0, do_menu, "menu - display a menu, to select the items to do something\n", " - display a menu, to select the items to do something"}
实质上就是用U_BOOT_CMD宏定义的信息构造了一个cmd_tbl_t类型的结构体。编译器将该结构体放在“u_boot_cmd”段,执行命令时就可以在“u_boot_cmd”段查找到对应的cmd_tbl_t类型结构体。
(3) 实现命令的函数
在cmd_menu.c中添加“menu”命令的响应函数的实现。具体的实现代码略:
int do_menu (cmd_tbl_t *cmdtp, int flag, int argc, char *argv[])
{
/* 实现代码略 */
}
(4) 将common/cmd_menu.c编译进u-boot.bin
在common/Makefile中加入如下代码:
COBJS-$(CONFIG_BOOT_MENU) += cmd_menu.o
在include/configs/mini2440.h加入如代码:
#define CONFIG_BOOT_MENU 1
重新编译下载U-Boot就可以使用menu命令了
(5)menu命令执行的过程
在U-Boot中输入“menu”命令执行时,U-Boot接收输入的字符串“menu”,传递给run_command函数。run_command函数调用common/command.c中实现的find_cmd函数在__u_boot_cmd_start与__u_boot_cmd_end间查找命令,并返回menu命令的cmd_tbl_t结构。然后run_command函数使用返回的cmd_tbl_t结构中的函数指针调用menu命令的响应函数do_menu,从而完成了命令的执行。
作者:heaad
http://www.cnblogs.com/heaad/
邮箱:heaad@qq.com
本文摘选自作者所写的一篇文章。转载请注明,水平有限,欢迎拍砖。

