
CFS任务的负载均衡(概述)
CFS任务的负载均衡(概述)
我们描述负载均衡的系列文章一共三篇,第一篇是框架部分,即本文,主要描述了负载均衡相关的原理、场景和框架。后面的两篇是对均衡代码的情景分析,通过对tick balance、new idle balance和task placement等几个典型的负载均衡来呈现其实现细节,稍后发布,敬请期待。
本文出现的内核代码来自Linux5.10.61,如果有兴趣,读者可以配合代码阅读本文。
一、什么是负载均衡
1、什么是CPU负载(load)
CPU load是一个很容易和CPU usage混淆的概念。CPU usage是CPU忙闲的比例,例如在一个周期为1000ms的窗口中观察CPU的情况,如果500ms的时间在执行任务,500ms的时间处于idle状态,那么在这个窗口中CPU的usage是50%。CPU usage是一个直观的概念,
所见即所得,然而它不能用来对比。
例如一个任务在小核300MHz频率下执行1000ms,看到CPU usage是100%,同样的任务,在大核3GHz下的执行50ms,CPU usage是5%。
这种场景下,同样的任务,load是一样的,但是CPU usage差别很大。CPU 利用率(utility)是另外一个容易混淆的概念。Utility和usage的共同点都是考虑了running time,区别是Utility进行了归一化,即把running time归一化到了系统中最大算力(超大核最高频率)上的执行时间。为了能和CPU capacity进行运算,utility还归一化到了1024。
CPU load和utility一样,都进行了归一化,但是概念还是不同的。Utility是一个和busy time(运行时间)相关的量,在CPU利用率没有达到100%的时候,利用率基本上等于负载,利用率高的时候负载也大,一旦当CPU利用率达到了100%的时候,利用率其实是无法给出CPU负载的状况,因为大家的利用率都是100%,利用率相等,但是并不意味着CPUs的负载也是相等的,因为这时候不同CPU上runqueue中等待执行的任务数目不同,直觉上runque上挂着10任务的CPU承压比挂着5个任务的CPU的负载要更重一些。因此,早期的CPU负载是使用runqueue深度来描述的。
3.8版本的linux内核引入了PELT算法来跟踪每一个sched entity的负载,把负载跟踪的算法从per-CPU进化到per-entity。PELT算法不但能知道CPU的负载,而且知道负载来自哪一个调度实体,从而可以更精准的进行负载均衡。
2、什么是均衡
对于负载均衡而言,并不是把整个系统的负载平均的分配到系统中的各个CPU上。实际上,我们还是必须要考虑系统中各个CPU的算力,让CPU获得和其算力匹配的负载。例如在一个6个小核+2个大核的系统中,整个系统如果有800的负载,那么每个CPU上分配100的负载其实是不均衡的,因为大核CPU可以提供更强的算力。
什么是CPU算力(capacity),所谓算力就是描述CPU的能够提供的计算能力。在同样的频率下,一个微架构是A77的CPU显然算力要大于A57的CPU。如果CPU的微架构都是一样的,那么一个最大频率是2.2GHz的CPU算力肯定是大于最大频率是1.1GHz的CPU。因此,确定了微架构和最大频率,一个CPU的算力就基本确定了。struct rq数据结构中有两个和算力相关的成员:
| 成员 | 描述 |
|---|---|
| unsigned long cpu_capacity; | 可以用于CFS任务的算力 |
| unsigned long cpu_capacity_orig; | 该CPU的原始算力,和微架构及其最大频率相关 |
Cpufreq系统会根据当前的CPU util来调节CPU当前的运行频率,也许触发温控,限制了该CPU的最大频率,但这并不能改变cpu_capacity_orig。本文主要描述CFS任务的均衡(RT的均衡不考虑负载,是在另外的维度),因此均衡需要考虑的CPU算力是cpu_capacity,这个算力需要把CPU用于执行rt、dl、irq的算力以及温控损失的算力去掉,即该CPU可用于CFS任务的算力。
因此,CFS任务均衡中使用的CPU算力(cpu_capacity成员)其实一个不断变化的值,需要经常更新(参考update_cpu_capacity函数)。为了让CPU算力和utility可以对比,实际上我们采用了归一化的方式,即系统中处理能力最强的CPU运行在最高频率的算力是1024,其他的CPU算力根据微架构和最大运行频率相应的进行调整。
有了各个任务负载,将runqueue中的任务负载累加起来就可以得到CPU负载,配合系统中各个CPU的算力,看起来我们就可以完成负载均衡的工作,然而事情没有那么简单,当负载不均衡的时候,任务需要在CPU之间迁移,不同形态的迁移会有不同的开销。
例如一个任务在小核cluster上的CPU之间的迁移所带来的性能开销一定是小于任务从小核cluster的CPU迁移到大核cluster的开销。因此,为了更好的执行负载均衡,我们需要构建和CPU拓扑相关的数据结构,也就是调度域和调度组的概念。
3、调度域(sched domain)和调度组(sched group)
负载均衡的复杂性主要和复杂的系统拓扑有关。由于当前CPU很忙,我们把之前运行在该CPU上的一个任务迁移到新的CPU上的时候,如果迁移到新的CPU是和原来的CPU在不同的cluster中,性能会受影响(因为会cache会变冷)。但是对于超线程架构,cpu共享cache,这时候超线程之间的任务迁移将不会有特别明显的性能影响。NUMA上任务迁移的影响又不同,我们应该尽量避免不同NUMA node之间的任务迁移,除非NUMA node之间的均衡达到非常严重的程度。总之,一个好的负载均衡算法必须适配各种cpu拓扑结构。为了解决这些问题,linux内核引入了sched_domain的概念。
内核中struct sched_domain来描述调度域,其主要的成员如下:
| 成员 | 描述 |
|---|---|
| Parent和child | Sched domain会形成层级结构,parent和child建立了不同层级结构的父子关系。对于base domain而言,其child等于NULL,对于top domain而言,其parent等于NULL。 |
| groups | 一个调度域中有若干个调度组,这些调度组形成一个环形链表,groups成员就是链表头。 |
| min_interval max_interval |
做均衡也是需要开销的,我们不可能时刻去检查调度域的均衡状态,这两个参数定义了检查该sched domain均衡状态的时间间隔范围 |
| busy_factor | 正常情况下,balance_interval定义了均衡的时间间隔,如果cpu繁忙,那么均衡要时间间隔长一些,即时间间隔定义为busy_factor x balance_interval |
| imbalance_pct | 调度域内的不均衡状态达到了一定的程度之后就开始进行负载均衡的操作。imbalance_pct这个成员定义了判定不均衡的门限 |
| cache_nice_tries | 这个成员应该是和nr_balance_failed配合控制负载均衡过程的迁移力度。当nr_balance_failed大于cache_nice_tries的时候,负载均衡会变得更加激进。 |
| nohz_idle | 每个cpu都有其对应的LLC sched domain,而LLC SD记录对应cpu的idle状态(是否tick被停掉),进一步得到该domain中busy cpu的个数,体现在(sd->shared->nr_busy_cpus) |
| flags | 调度域标志,下面有表格详细描述 |
| level | 该sched domain在整个调度域层级结构中的level。Base sched domain的level等于0,向上依次加一。 |
| last_balance | 上次进行balance的时间点。通过基础均衡时间间隔()和当前sd的状态可以计算最终的均衡间隔时间(get_sd_balance_interval),last_balance加上这个计算得到的均衡时间间隔就是下一次均衡的时间点。 |
| balance_interval | 定义了该sched domain均衡的基础时间间隔 |
| nr_balance_failed | 本sched domain中进行负载均衡失败的次数。当失败次数大于cache_nice_tries的时候,我们考虑迁移cache hot的任务,进行更激进的均衡操作。 |
| max_newidle_lb_cost | 在该domain上进行newidle balance的最大时间长度(即newidle balance的开销)。 最小值是sysctl_sched_migration_cost |
| next_decay_max_lb_cost | max_newidle_lb_cost会记录最近在该sched domain上进行newidle balance的最大时间长度,这个max cost不是一成不变的,它有一个衰减过程,每秒衰减1%,这个成员就是用来控制衰减的。 |
| avg_scan_cost | 平均扫描成本 |
| 负载均衡统计成员 | 负载均衡的统计信息 |
| struct sched_domain_shared *shared | 为了降低锁竞争,Sched domain是per-CPU的,然而有一些信息是需要在per-CPU 的sched domain之间共享的,不能在每个sched domain上构建。这些共享信息是:1、该sched domain中的busy cpu的个数2、该sched domain中是否有idle的cpu |
| span_weight span |
该调度域的跨度,在手机场景下,span等于该sched domain中所有CPU core形成的cpu mask。span_weight说明该sched domain中CPU的个数。 |
关于调度域标记解释如下:
| 调度域标记 | 描述 |
|---|---|
| SD_BALANCE_NEWIDLE | 标记domain是否支持newidle balance。 |
| SD_BALANCE_EXEC SD_BALANCE_FORK SD_BALANCE_WAKE |
在exec、fork、wake的时候,该domain是否支持指定类型的负载均衡。这些标记符号主要用来在确定exec、fork和wakeup场景下选核的范围。 |
| SD_WAKE_AFFINE | 是否在该domain上考虑进行wake affine,即满足一定条件下,让waker和wakee尽量靠近 |
| SD_ASYM_CPUCAPACITY | 该domain上的CPU上是否具有一样的capacity?MC domain上的CPU算力一样,但是DIE domain上会设置该flag |
| SD_SHARE_CPUCAPACITY | 该domain上的CPU上是否共享计算单元?例如SMT下,两个硬件线程被看做两个CPU core,但是它们之间不是完全独立的,会竞争一些硬件的计算单元。手机上未使用该flag |
| SD_SHARE_PKG_RESOURCES | Domain中的cpu是否共享SOC上的资源(例如cache)。手机平台上,MC domain会设定该flag。 |
调度域并不是一个平层结构,而是根据CPU拓扑形成层级结构。相对应的,负载均衡也不是一蹴而就的,而是会在多个sched domain中展开(例如从base domain开始,一直到顶层sched domain,逐个domain进行均衡)。具体如何进行均衡(自底向上还是自顶向下,在哪些domain中进行均衡)是和均衡类型和各个sched domain设置的flag相关,具体细节后面会描述。
在指定调度域内进行均衡的时候不考虑系统中其他调度域的CPU负载情况,只考虑该调度域内的sched group之间的负载是否均衡。对于base doamin,其所属的sched group中只有一个cpu,对于更高level的sched domain,其所属的sched group中可能会有多个cpu core。内核中struct sched_group来描述调度组,其主要的成员如下:
| 成员 | 描述 |
|---|---|
| next | sched domain中的所有sched group会形成环形链表,next指向groups链表中的下一个节点。 |
| ref | 该sched group的引用计数 |
| group_weight | 该调度组中有多少个cpu |
| sgc | 该调度组的算力信息 |
| cpumask | 该调度组包括哪些CPU |
上面的描述过于枯燥,我们后面会使用一个具体的例子来描述负载如何在各个level的sched domain上进行均衡的,不过在此之前,我们先看看负载均衡的整体软件架构。
二、负载均衡的软件架构
负载均衡的整体软件结构图如下:
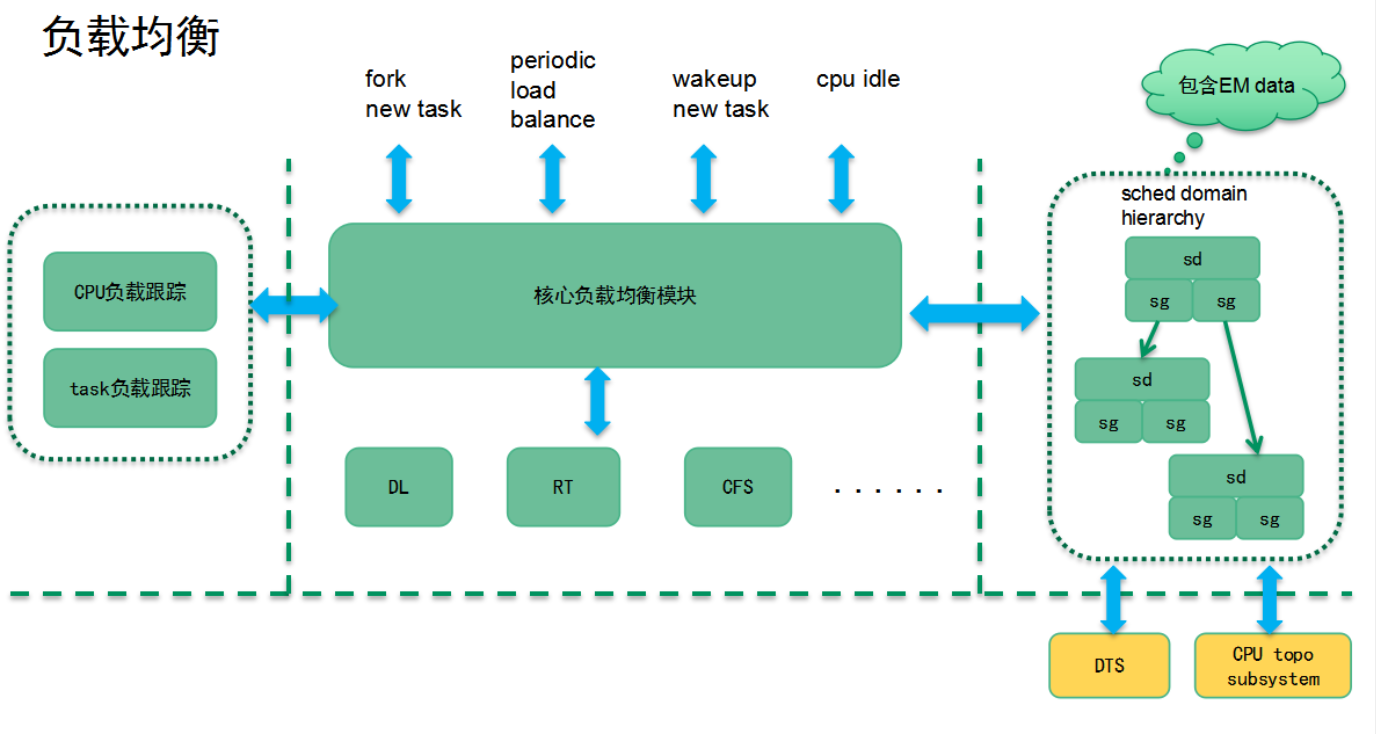
负载均衡模块主要分两个软件层次:核心负载均衡模块和class-specific均衡模块。内核对不同的类型的任务有不同的均衡策略,普通的CFS(complete fair schedule)任务和RT、Deadline任务处理方式是不同的,由于篇幅原因,本文主要讨论CFS任务的负载均衡。
(1)判断该任务是否适合当前CPU算力
(2)如果判定需要均衡,那么需要在CPU之间迁移多少的任务才能达到平衡?有了任务负载跟踪模块,这个问题就比较好回答了。
为了更好的进行高效的均衡,我们还需要构建调度域的层级结构(sched domain hierarchy),图中显示的是二级结构(这里给的是逻辑结构,实际内核中的各个level的sched domain是per cpu的)。手机场景多半是二级结构,支持NUMA的服务器场景可能会形成更复杂的结构。
通过DTS和CPU topo子系统,我们可以构建sched domain层级结构,用于具体的均衡算法。在手机平台上,负载均衡会进行两个level:MC domain的均衡和DIE domain的均衡。
- 在MC domain上,我们会对跟踪每个CPU负载状态(sched group只有一个CPU)并及时更新其算力,使得每个CPU上有其匹配的负载。
- 在DIE domain上,我们会跟踪cluster上所有负载(每个cluster对应一个sched group)以及cluster的总算力,然后计算cluster之间负载的不均衡状况,通过inter-cluster迁移让整个DIE domain进入负载均衡状态。
有了上面描述的基础设施,那么什么时候进行负载均衡呢?这主要和调度事件相关,当发生任务唤醒、任务创建、tick到来等调度事件的时候,我们可以检查当前系统的不均衡情况,并酌情进行任务迁移,以便让系统负载处于平衡状态。
三、如何做负载均衡
1、一个CPU拓扑示例
我们以一个4小核+4大核的处理器来描述CPU的domain和group:
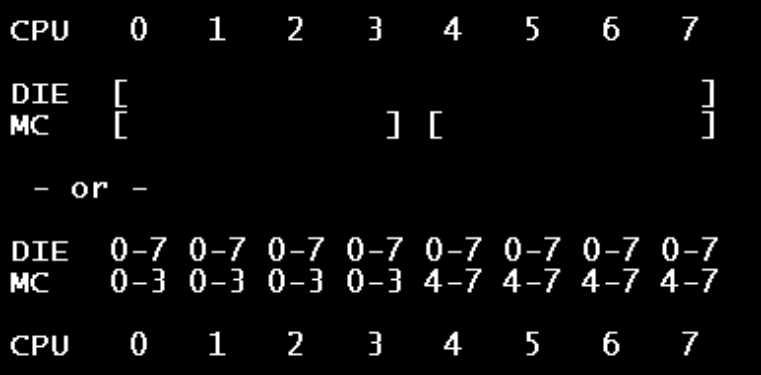
在上面的结构中,sched domain是分成两个level,base domain称为MC domain(multi core domain)
- 顶层的domain称为DIE domain。顶层的DIE domain覆盖了系统中所有的CPU
- 小核cluster的MC domain包括所有小核cluster中的cpu,同理,大核cluster的MC domain包括所有大核cluster中的cpu。
对于小核MC domain而言,其所属的sched group有四个,cpu0、1、2、3分别形成一个sched group,形成了MC domain的sched group环形链表。
不同CPU的MC domain的环形链表首元素(即sched domain中的groups成员指向的那个sched group)是不同的,对于cpu0的MC domain,其groups环形链表的顺序是0-1-2-3,对于cpu1的MC domain,其groups环形链表的顺序是1-2-3-0,以此类推。大核MC domain也是类似,这里不再赘述。
对于非base domain而言,其sched group有多个cpu,覆盖其child domain的所有cpu。
例如上面图例中的DIE domain,它有两个child domain,分别是大核domain和小核domian,因此,DIE domain的groups环形链表有两个元素,分别是小核group和大核group。不同CPU的DIE domain的环形链表首元素(即链表头)是不同的,对于cpu0的DIE domain,其groups环形链表的顺序是(0,1,2,3)--(4,5,6,7),对于cpu6的MC domain,其groups环形链表的顺序是(4,5,6,7)--(0,1,2,3),以此类推。
为了减少锁的竞争,每一个cpu都有自己的MC domain和DIE domain,并且形成了sched domain之间的层级结构。在MC domain,其所属cpu形成sched group的环形链表结构,各个cpu对应的MC domain的groups成员指向环形链表中的自己的cpu group。在DIE domain,cluster形成sched group的环形链表结构,各个cpu对应的DIE domain的groups成员指向环形链表中的自己的cluster group。
2、负载均衡的基本过程
负载均衡不是一个全局CPU之间的均衡,实际上那样做也不现实,当系统的CPU数量较大的时候,很难一次性的完成所有CPU之间的均衡,这也是提出sched domain的原因之一。
我们以周期性均衡为例来描述负载均衡的基本过程。当一个CPU上进行周期性负载均衡的时候,我们总是从base domain开始(对于上面的例子,base domain就是MC domain),检查其所属sched group之间(即各个cpu之间)的负载均衡情况,如果有不均衡情况,那么会在该cpu所属cluster之间进行迁移,以便维护cluster内各个cpu core的任务负载均衡。
(1)找到MC domain中最繁忙的sched group
(2)找到最繁忙sched group中最繁忙的CPU(对于MC domain而言,这一步不存在,毕竟其sched group只有一个cpu)
(3)从选中的那个繁忙的cpu上拉取任务,具体拉取多少的任务到本CPU runqueue上是和不均衡的程度相关,越是不均衡,拉取的任务越多。
完成MC domain均衡之后,继续沿着sched domain层级结构向上检查,进入DIE domain,在这个level的domain上,我们仍然检查其所属sched group之间(即各个cluster之间)的负载均衡情况,如果有不均衡的情况,那么会进行inter-cluster的任务迁移。基本方法和MC domain类似,只不过在计算均衡的时候,DIE domain不再考虑单个CPU的负载和算力,它考虑的是:
(1)该sched group的负载,即sched group中所有CPU负载之和
(2)该sched group的算力,即sched group中所有CPU算力之和
3、其他需要考虑的事项
之所以要进行负载均衡主要是为了系统整体的throughput,避免出现一核有难,七核围观的状况。
然而,进行负载均衡本身需要额外的算力开销,为了降低开销,我们为不同level的sched domain定义了时间间隔,不能太密集的进行负载均衡。
之外,我们还定义了不均衡的门限值,也就是说domain的group之间如果有较小的不均衡,我们也是可以允许的,超过了门限值才发起负载均衡的操作。很显然,越高level的sched domain其不均衡的threashhold越高,越高level的均衡会带来更大的性能开销。
在引入异构计算系统之后,任务在placement的时候可以有所选择。如果负载比较轻,或者该任务对延迟要求不高,我们可以放置在小核CPU执行,如果负载比较重或者该该任务和用户体验相关,那么我们倾向于让它在算力更高的CPU上执行。为了应对这种状况,内核引入了misfit task的概念。一旦任务被标记了misfit task,那么负载均衡算法要考虑及时的将该任务进行upmigration,从而让重载任务尽快完成,或者提升该任务的执行速度,从而提升用户体验。
除了性能,负载均衡也会带来功耗的收益。例如系统有4个CPU,共计8个进入执行态的任务(负载相同)。这些任务在4个CPU上的排布有两种选择:
(1)全部放到一个CPU上
(2)每个CPU runqueue挂2个任务
负载均衡算法会让任务均布,从而带来功耗的收益。虽然方案一中有三个CPU是处于idle状态的,但是那个繁忙CPU运行在更高的频率上。而方案二中,由于任务均布,CPU处于较低的频率运行,功耗会比方案一更低。
四、负载均衡场景分析
1、整体的场景描述
在linux内核中,为了让任务均衡的分布在系统的所有CPU上,我们主要考虑下面三个场景:
(1)负载均衡(load balance)。通过搬移cpu runqueue上的任务,让各个CPU上的负载匹配CPU算力。
(2)任务放置(task placement)。当阻塞的任务被唤醒的时候,确定该任务应该放置在那个CPU上执行
(3)主动均衡(active upmigration)。当一个低算力CPU的runqueue中出现misfit task的时候,如果该任务持续执行,那么负载均衡无能为力,因为它只负责迁移runnable状态的任务。这种场景下,active upmigration可以把当前正在运行的misfit task向上迁移到算力更高的CPU上去。
2、Task placement
任务放置主要发生在:
(1)唤醒一个新fork的线程
(2)Exec一个线程的时候
(3)唤醒一个阻塞的进程
在上面的三个场景中都会调用select_task_rq来为task选择一个适合的CPU core。
3、Load balance
Load balance主要有三种:
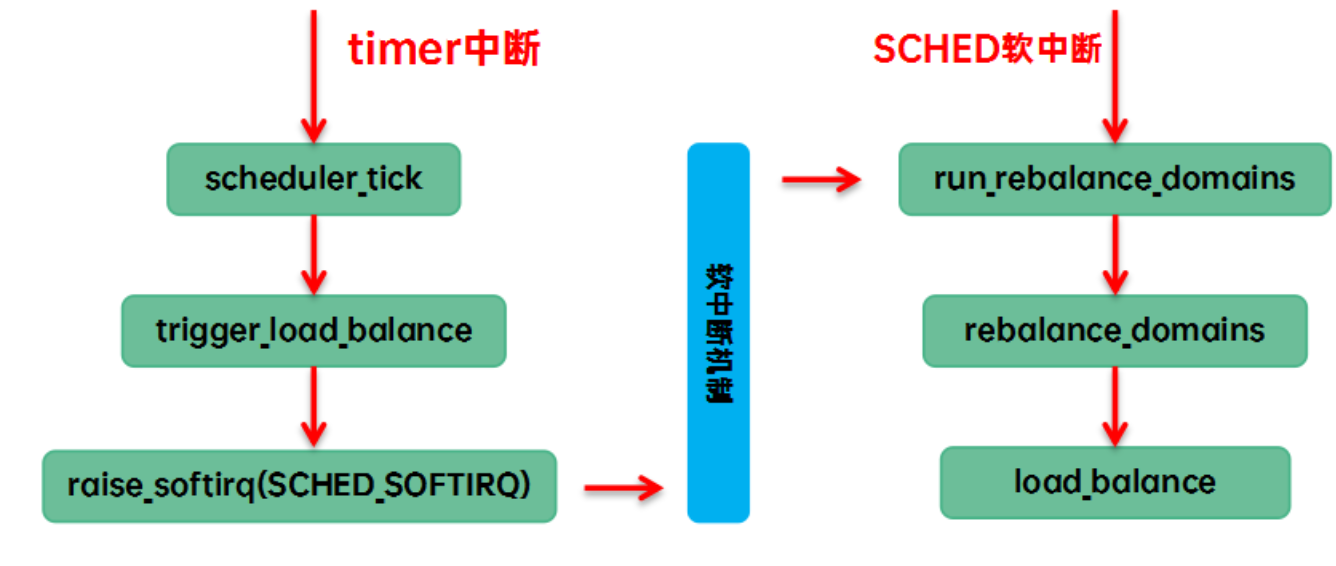
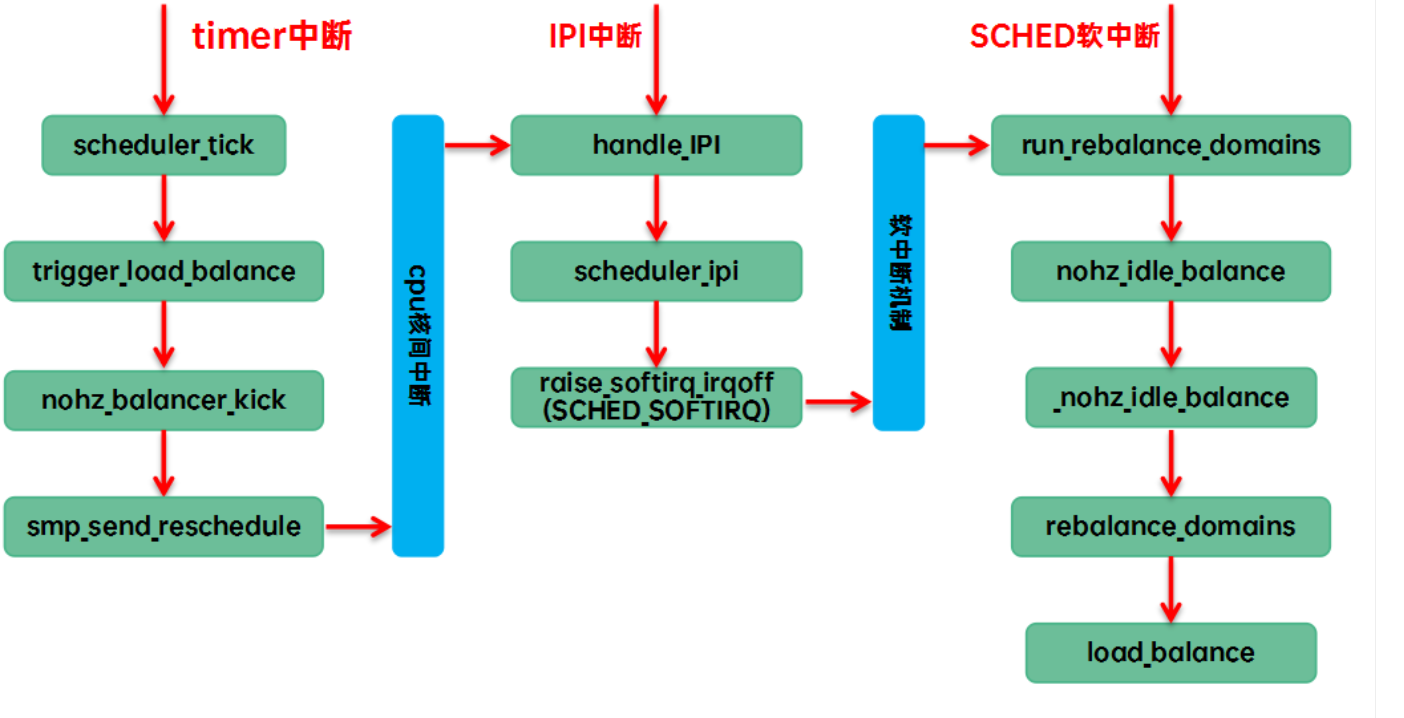
(1)在tick中触发load balance。我们称之tick load balance或者periodic load balance。具体的代码执行路径是:
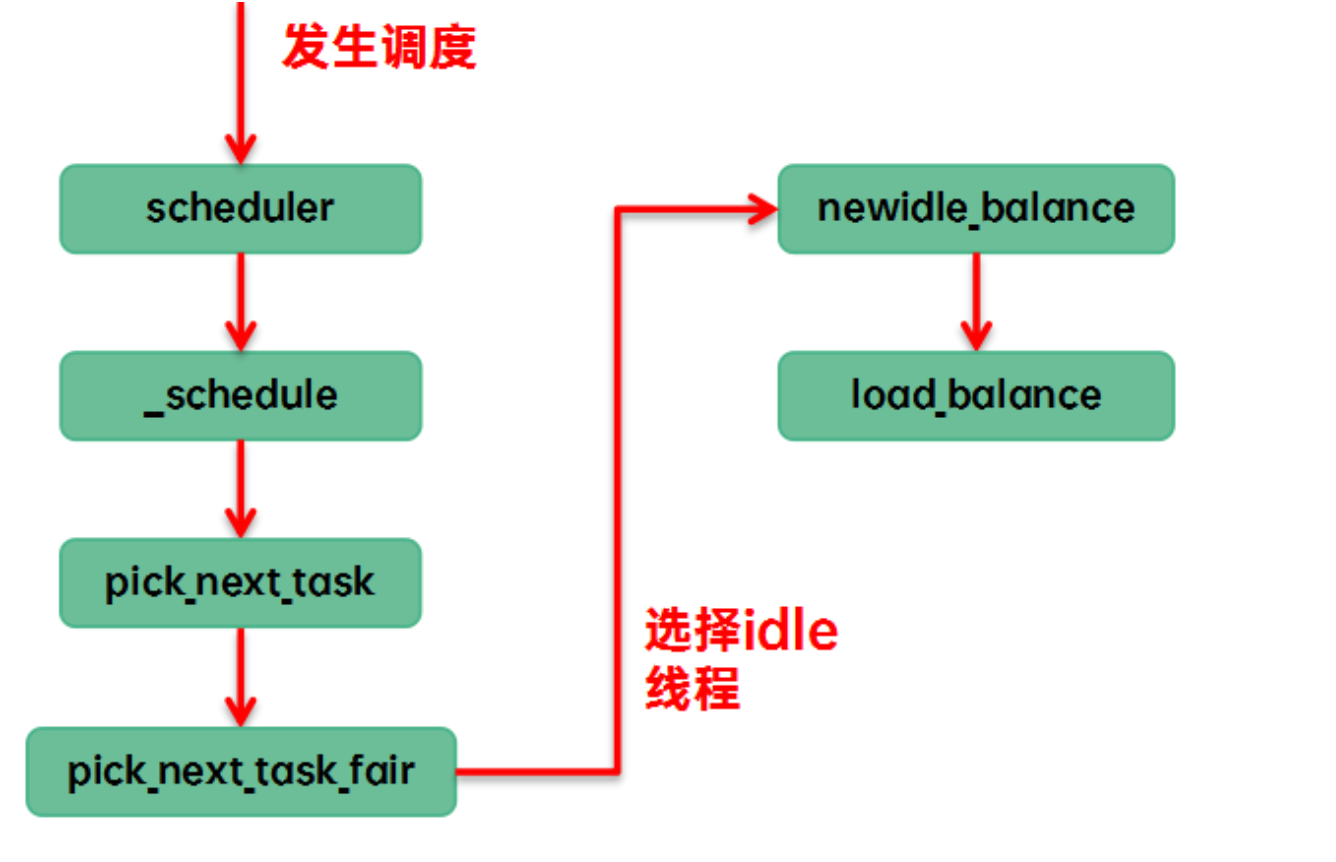
(2)调度器在pick next的时候,当前cfs runque中没有runnable,只能执行idle线程,让CPU进入idle状态。我们称之new idle load balance。具体的代码执行路径是:
(3)其他的cpu已经进入idle,本CPU任务太重,需要通过ipi将其idle的cpu唤醒来进行负载均衡。我们称之nohz idle load banlance,具体的代码执行路径是:
如果没有dynamic tick特性,那么其实不需要进行nohz idle load balance,因为tick会唤醒处于idle的cpu,从而周期性tick就可以覆盖这个场景。
4、Active upmigration
主动迁移是Load balance的一种特殊场景。
在负载均衡中,只要运用适当的同步机制(持有一个或者多个rq lock),runnable的任务可以在各个CPU runqueue之间移动,然而running的任务是例外,它不挂在CPU runqueue中,load balance无法覆盖。为了能够迁移running状态的任务,内核提供了Active upmigration的方法(利用stop machine调度类)。这个feature原生内核没有提供,故不再详述。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号