【优秀论文解读】BoW3D: Bag of Words for Real-time Loop Closing in 3D LiDAR SLAM
论文简介
本论文新颖性在于3D激光雷达中实时闭环 且能够实时进行回环矫正 词袋模型为BoW3D 实时构建词袋 效率高 但是鲁棒性未知
词袋存储
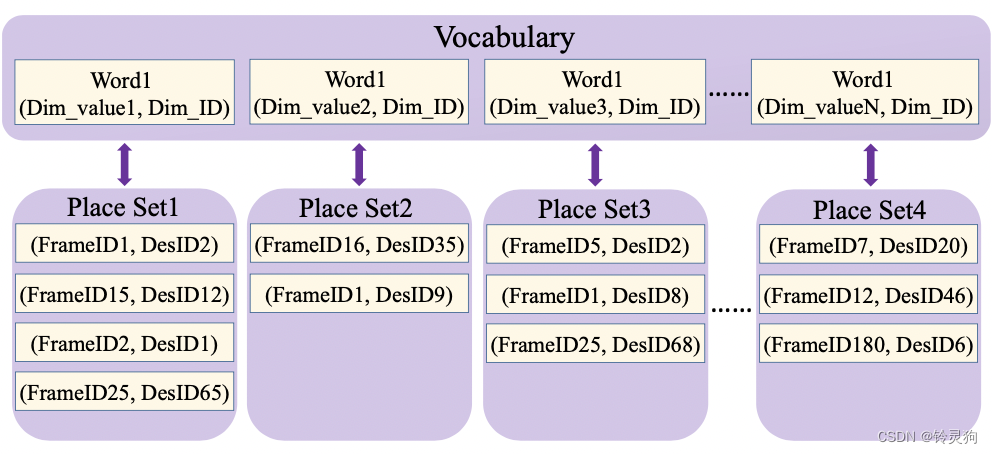
word包含两种变量:Dim_value为描述子计算得到的非零数和Dim_ID为word相对应的维度数 具体的计算可以查看论文:Link3d关键点的计算
Place Set为一张图片中的word集合 包含两种变量:FrameID为第几帧和DesID为一帧画面中的描述子的ID号、
Place Set记录了word出现在第几帧中的第几个描述子
优点:不需要加载额外的单词文件 且hash表的查找需要的时间复杂度很低 对于检索来说大大的提高了效率
类似于tf-idf的处理方式
当一个word出现次数过多并且超过了阈值时 认为这个特征比较普通 为了提高检测效率将不对这种word做记录
tf-idf的处理方式为:
\(n_{wi}\)为单词w在第i帧图片中出现的次数
\(n_i\)为图片中的单词总数
\(N\)所有的图片数 即当前记录了多少帧
\(n_w\)单词w在所有图片中出现的总次数
意思是如果单词w出现的次数越多 那么这个w的tf-idf得分就越高 表明这个word不适合用来分类
本文的做法使用一种类似于tf-idf的方法 目的同样是为了提高检索效率:
\(N_{set}\)为word对应的place set中包含的place个数(参考上面的图片)
\(N\)为place的总数
\(n_w\)为总的单词数
如果这个数值高于了阈值 那么这个word对应的place set将不会再被计算
回环矫正
构建误差方程:
\(l\)为回环检测到的历史帧的点云
\(c\)为当前帧的点云
\(s\)为激光点
求解R t的方法:
\(s_ls_c\)为去中心化的点云坐标 剩下的应该都不用太解释
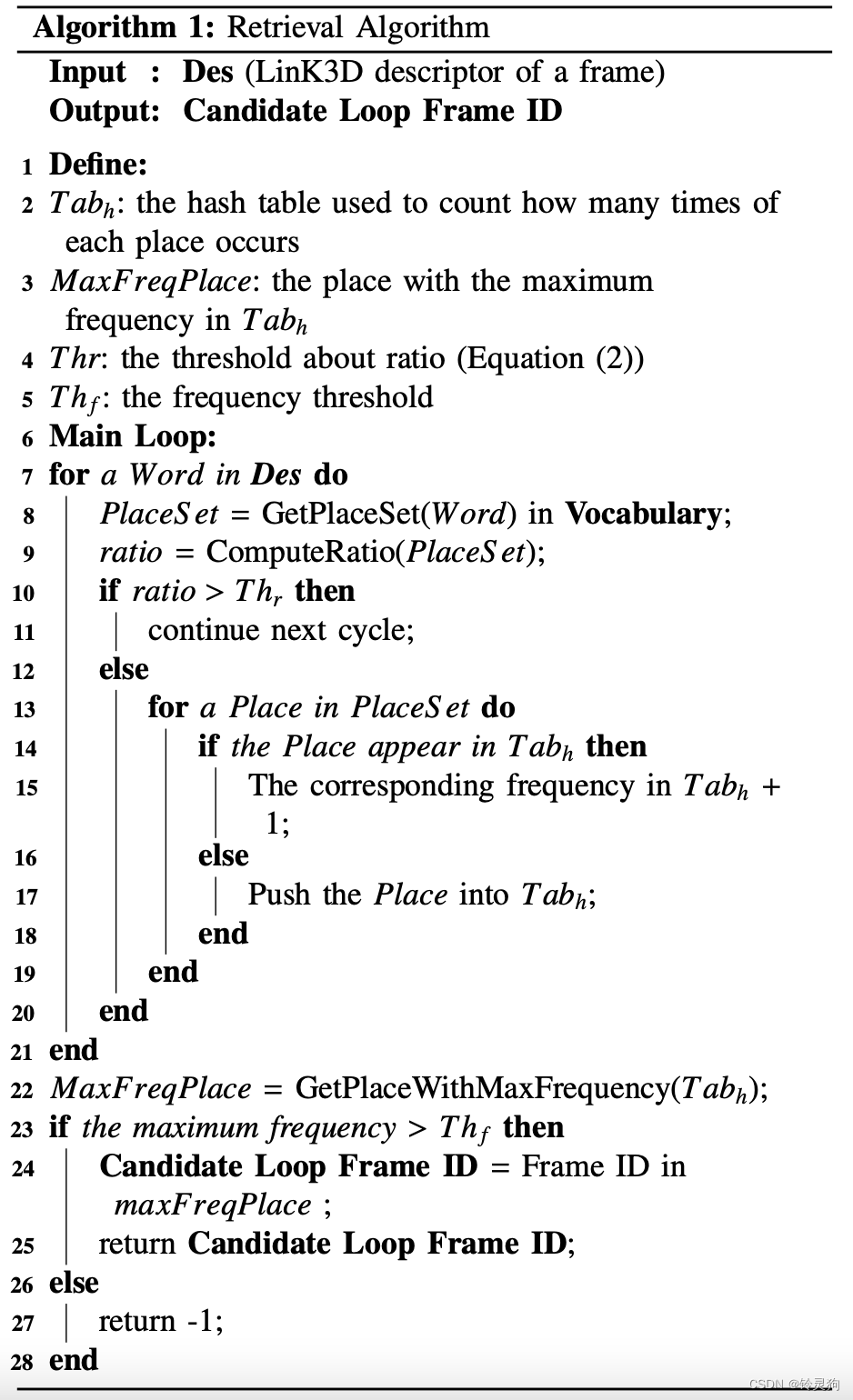
检测回环
- Link3D的描述子作为输入且维护一个记录该帧每个place出现频率的hash table
- 获得每一个Link3D描述子中的word对应的place set
- 为每一个place set计算ratio 如果某个单词的频率过高 则直接进入下一次循环
- 如果没有大于阈值 则遍历这个单词对应的place set中的每一个place
- 如果这个place在hash表中 则该place的频率加一 如果没有出现过 则把这个place加到hash表中
- 计算这个hash table中频率最高的place 如果高于了阈值 则认为这一帧是他的回环历史帧
原文的伪代码:
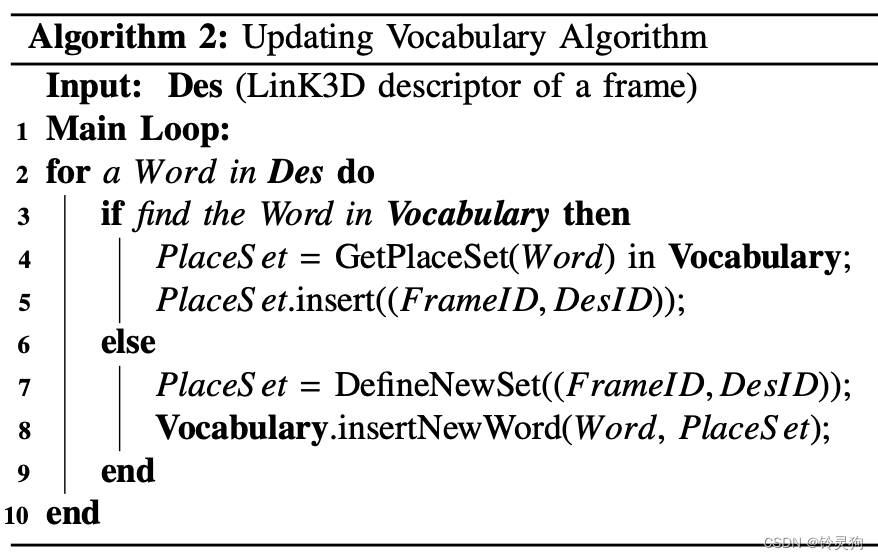
还有一个更新词典的策略 过于简单 不做文字详解:
优化全部相关变量
\(i,j\)两帧之间的残差定义为:
\(S\)为所有相邻的边的集合
\(L\)为回环检测的边
全部都会使用Levenberg-Marquadt方法在g2o上优化

 浙公网安备 33010602011771号
浙公网安备 33010602011771号