
在HDevelop中

dev_close_window ()
read_image (Image, 'D:/bb/tu/7.jpg')
rgb1_to_gray (Image, GrayImage)
edges_sub_pix (GrayImage, Edges, 'canny', 1, 5, 10)
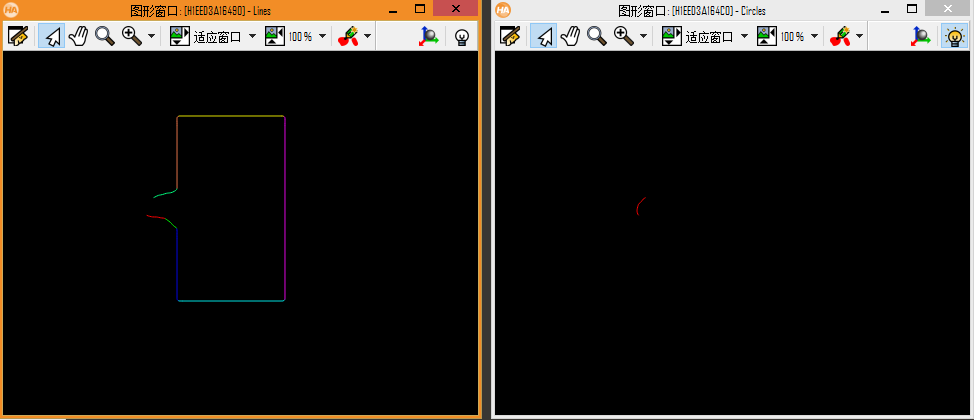
segment_contours_xld (Edges, ContoursSplit, 'lines_circles', 5, 4, 2)
*分割xld轮廓
*参数1:需要进行分割的轮廓
*参数2:分割后的轮廓tuple
*参数3:分割轮廓的方式
* 'lines' 将输入轮廓分割成线条
* 'lines_circles' 将其分割成线条和圆弧
* 'lines_ellipses' 将其分割成线条和椭圆弧
*参数4:轮廓平滑的参数,可以抑制在折线逼近过程中过短的线段
* 注意:不能等于0;最好大于等于3并且是奇数;建议值是5
*参数5:第一次用Ramer算法(即用直线段递进逼近轮廓)时的MaxLineDist,在逼近完
* 成之后,再用圆弧或椭圆弧对相邻分割线段进行拟合,如果拟合圆弧到轮廓的距
* 离小于逼近线段到轮廓的距离,就用圆弧替代逼近线段,这个过程一致迭代直到
* 所有的线段拟合完毕。
*参数6:第二次逼近轮廓时的MaxLineDist
* 只有当MaxLineDist2这种两步逼近算法效率较高,因为在第一次逼近过程中,递进
* 逼近的直线段较少,因此较大直径的圆弧能够被高效的分割出来。在第二次逼近过程
* 中,能够被小直径圆弧逼近的轮廓被找到,同时大直径圆弧的末端被重新定义
count_obj (ContoursSplit, Number)
*9
gen_empty_obj (Lines)
*实例化一个空对象
gen_empty_obj(Circles)
for I:=1 to Number by 1
*遍历
select_obj (ContoursSplit, ObjectSelected, I)
get_contour_global_attrib_xld (ObjectSelected, 'cont_approx', Attrib)
*返回XLD轮廓的全局属性名的值,全局属性是为每个轮廓定义的附加值
*参数1:xld轮廓
*参数2:全局属性名,包含如下:
* 'regr_norm_row'
* 'regr_norm_col'
* 'regr_mean_dist'
* 'regr_dev_dist'
* 'cont_approx'
* 可判断轮廓段的种类是直线、圆弧 还是 椭圆弧 具体如下:
* cont_approx = -1 对应XLD为直线,可以拟合为直线
* cont_approx = 0 对应XLD为圆,可以拟合为圆
* cont_approx = 1 对应XLD为椭圆,可以拟合为椭圆
* 'bright_dark'
* 'is_hole'
*参数3:返回的属性值
if(Attrib=-1)
concat_obj (Lines, ObjectSelected, Lines)
*两个区域组合成区域集
else
concat_obj (Circles, ObjectSelected, Circles)
endif
endfor
get_image_size (GrayImage, Width, Height)
dev_open_window(10,10,Width, Height,'black',WindowHandle)
dev_display(Lines)
dev_open_window(10,10,Width, Height,'black',WindowHandle1)
dev_display(Circles)
在QtCreator中
HObject ho_Image, ho_GrayImage, ho_Edges, ho_ContoursSplit;
HObject ho_Lines, ho_Circles, ho_ObjectSelected;
HTuple hv_Number, hv_I, hv_Attrib, hv_Width;
HTuple hv_Height, hv_WindowHandle, hv_WindowHandle1;
ReadImage(&ho_Image, "D:/bb/tu/7.jpg");
Rgb1ToGray(ho_Image, &ho_GrayImage);
EdgesSubPix(ho_GrayImage, &ho_Edges, "canny", 1, 5, 10);
SegmentContoursXld(ho_Edges, &ho_ContoursSplit, "lines_circles", 5, 4, 2);
//分割xld轮廓
//参数1:需要进行分割的轮廓
//参数2:分割后的轮廓tuple
//参数3:分割轮廓的方式
// 'lines' 将输入轮廓分割成线条
// 'lines_circles' 将其分割成线条和圆弧
// 'lines_ellipses' 将其分割成线条和椭圆弧
//参数4:轮廓平滑的参数,可以抑制在折线逼近过程中过短的线段
// 注意:不能等于0;最好大于等于3并且是奇数;建议值是5
//参数5:第一次用Ramer算法(即用直线段递进逼近轮廓)时的MaxLineDist,在逼近完
// 成之后,再用圆弧或椭圆弧对相邻分割线段进行拟合,如果拟合圆弧到轮廓的距
// 离小于逼近线段到轮廓的距离,就用圆弧替代逼近线段,这个过程一致迭代直到
// 所有的线段拟合完毕。
//参数6:第二次逼近轮廓时的MaxLineDist
// 只有当MaxLineDist2这种两步逼近算法效率较高,因为在第一次逼近过程中,递进
// 逼近的直线段较少,因此较大直径的圆弧能够被高效的分割出来。在第二次逼近过程
// 中,能够被小直径圆弧逼近的轮廓被找到,同时大直径圆弧的末端被重新定义
CountObj(ho_ContoursSplit, &hv_Number);
//9
GenEmptyObj(&ho_Lines);
//实例化一个空对象
GenEmptyObj(&ho_Circles);
{
HTuple end_val31 = hv_Number;
HTuple step_val31 = 1;
for (hv_I=1; hv_I.Continue(end_val31, step_val31); hv_I += step_val31)
{
//遍历
SelectObj(ho_ContoursSplit, &ho_ObjectSelected, hv_I);
GetContourGlobalAttribXld(ho_ObjectSelected, "cont_approx", &hv_Attrib);
//返回XLD轮廓的全局属性名的值,全局属性是为每个轮廓定义的附加值
//参数1:xld轮廓
//参数2:全局属性名,包含如下:
// 'regr_norm_row'
// 'regr_norm_col'
// 'regr_mean_dist'
// 'regr_dev_dist'
// 'cont_approx'
// 可判断轮廓段的种类是直线、圆弧 还是 椭圆弧 具体如下:
// cont_approx = -1 对应XLD为直线,可以拟合为直线
// cont_approx = 0 对应XLD为圆,可以拟合为圆
// cont_approx = 1 对应XLD为椭圆,可以拟合为椭圆
// 'bright_dark'
// 'is_hole'
//参数3:返回的属性值
if (0 != (hv_Attrib==-1))
{
ConcatObj(ho_Lines, ho_ObjectSelected, &ho_Lines);
//两个区域组合成区域集
}
else
{
ConcatObj(ho_Circles, ho_ObjectSelected, &ho_Circles);
}
}
}
GetImageSize(ho_GrayImage, &hv_Width, &hv_Height);
SetWindowAttr("background_color","black");
OpenWindow(10,10,hv_Width,hv_Height,0,"visible","",&hv_WindowHandle);
HDevWindowStack::Push(hv_WindowHandle);
if (HDevWindowStack::IsOpen())
DispObj(ho_Lines, HDevWindowStack::GetActive());
SetWindowAttr("background_color","black");
OpenWindow(10,10,hv_Width,hv_Height,0,"visible","",&hv_WindowHandle1);
HDevWindowStack::Push(hv_WindowHandle1);
if (HDevWindowStack::IsOpen())
DispObj(ho_Circles, HDevWindowStack::GetActive());








【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
2020-03-15 python-qrcode模块生成二维码
2019-03-15 python随机数random模块
2019-03-15 随机数random
2019-03-15 时间戳time