opencv-pointPolygonTest检测点是否在轮廓内

10.png


#include<opencv2/opencv.hpp> #include<iostream> #include <vector> int main(int argc, char** argv) { cv::Mat src = cv::imread("D:/bb/tu/10.png",0); cv::GaussianBlur(src, src, cv::Size(3, 3), 0);//过滤 cv::Mat dst; cv::threshold(src, dst, 150, 255, 0); std::vector<std::vector<cv::Point>> contours; std::vector<cv::Vec4i> hierachy; findContours(dst, contours, hierachy, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE, cv::Point(0, 0));//找出轮廓坐标点 std::cerr << contours.size() << std::endl; //找到的轮廓数量 cv::Mat dst1(dst.size(), dst.type()); drawContours(dst1, contours, 1, cv::Scalar::all(255), 2, 8, hierachy); //画出树叶轮廓 cv::imshow("树叶轮廓", dst1); double distance = pointPolygonTest(contours[1], cv::Point2f(150, 50), true);//检测指定点是否在指定轮廓内 /* 参数1:轮廓 参数2:点 参数3:设置为true时,返回实际距离值【点到轮廓的最短距离】;若返回值为正,表示点在多边形内部,返回值为负,表示在多边形外部, 返回值为0,表示在多边形上 设置为false时,返回 -1、0、1三个固定值。若返回值为+1,表示点在多边形内部,返回值为-1,表示在多边 形外部,返回值为0,表示在多边形上 【遍历轮廓内每个点的距离,最大值就是内接圆的圆心】 */ std::cerr << distance << std::endl; //34.8855 cv::waitKey(0); return 0; }

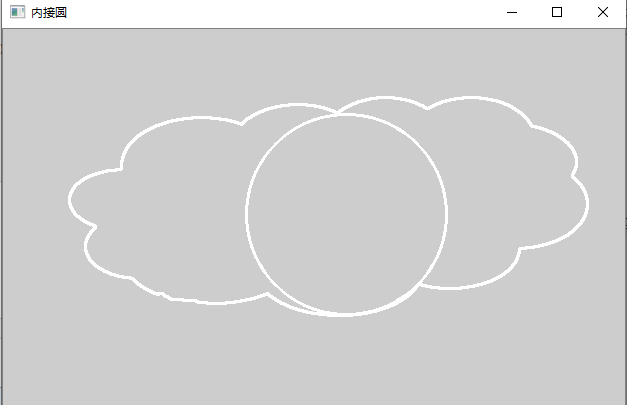
应用实例:内接圆
8.png
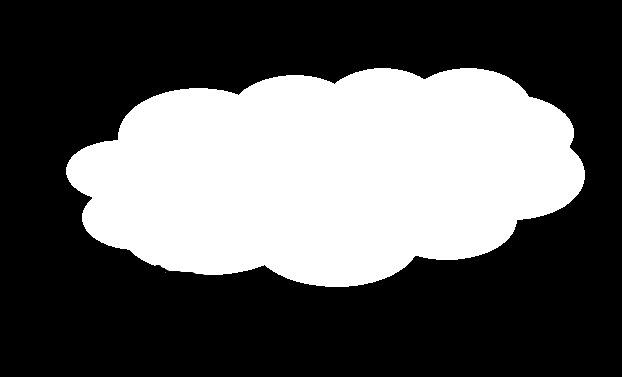
#include<opencv2/opencv.hpp> #include<iostream> #include <vector> int main(int argc, char** argv) { cv::Mat src = cv::imread("D:/bb/tu/8.png",0); cv::Mat dst; cv::threshold(src, dst, 150, 255, 0); std::vector<std::vector<cv::Point>> contours; std::vector<cv::Vec4i> hierachy; findContours(dst, contours, hierachy, cv::RETR_TREE, cv::CHAIN_APPROX_SIMPLE, cv::Point(0, 0));//找出轮廓坐标点 std::cerr << contours.size() << std::endl; //找到的轮廓数量 cv::Mat dst1(dst.size(), dst.type()); drawContours(dst1, contours, 0, cv::Scalar::all(255), 2, 8, hierachy); //画出云朵轮廓 int len = 0;//记录最大距离-半径 int x = 0, y = 0; //记录圆心 for (int row = 0; row < dst.rows;row++) { for (int col = 0; col < dst.cols;col++) { double distance = pointPolygonTest(contours[0], cv::Point2f(col, row), true);//检测指定点是否在指定轮廓内 if (distance > len) { len = distance; x = col; y = row; } } } cv::Point p= cv::Point(x, y); cv::circle(dst1, p, len, cv::Scalar(255), 2); //画内接圆 cv::imshow("内接圆", dst1); cv::waitKey(0); return 0; }







【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
2020-01-20 python--opencv-图像色彩转换
2020-01-20 python-opencv-旋转