opencv-calcBackProject反向投影

反向投影概念
反向投影是一种记录给定图像中的像素点如何适应直方图模型像素分布的方式,简单来讲,反向投影就是首先计算某一特征的直方图模型,然后使用模型去寻找图像中存在的特征。反向投影在某一位置的值就是原图对应位置像素值在原图像中的总数目
反向投影原理

#include<opencv2/opencv.hpp> #include<iostream> int main(int argc, char** argv) { cv::Mat M(4, 4, CV_8UC1, cv::Scalar(0)); M.at<uchar>(0, 1) = 1; M.at<uchar>(0, 2) = 2; M.at<uchar>(0, 3) = 3; M.at<uchar>(1, 0) = 4; M.at<uchar>(1, 1) = 5; M.at<uchar>(1, 2) = 6; M.at<uchar>(1, 3) = 7; M.at<uchar>(2, 0) = 8; M.at<uchar>(2, 1) = 9; M.at<uchar>(2, 2) = 10; M.at<uchar>(2, 3) = 11; M.at<uchar>(3, 0) = 8; M.at<uchar>(3, 1) = 9; M.at<uchar>(3, 2) = 14; M.at<uchar>(3, 3) = 15; std::cerr << "M="<< std::endl << M << std::endl << std::endl; cv::Mat hist; //保存直方图 int bins = 4; //设定bins数目 float range[] = { 0, 16 };//设定取值范围 //注意:取值范围[0,16) const float* histRange = { range }; calcHist(&M, 1, 0, cv::Mat(), hist, 1, &bins, &histRange, true, false); std::cerr << "hist=" << std::endl << hist << std::endl << std::endl; cv::waitKey(0); return 0; }
(1)上面灰度图像如下 :
(2)该灰度图的直方图为(bin指定的区间为[0,3],[4,7],[8,11],[12,16))

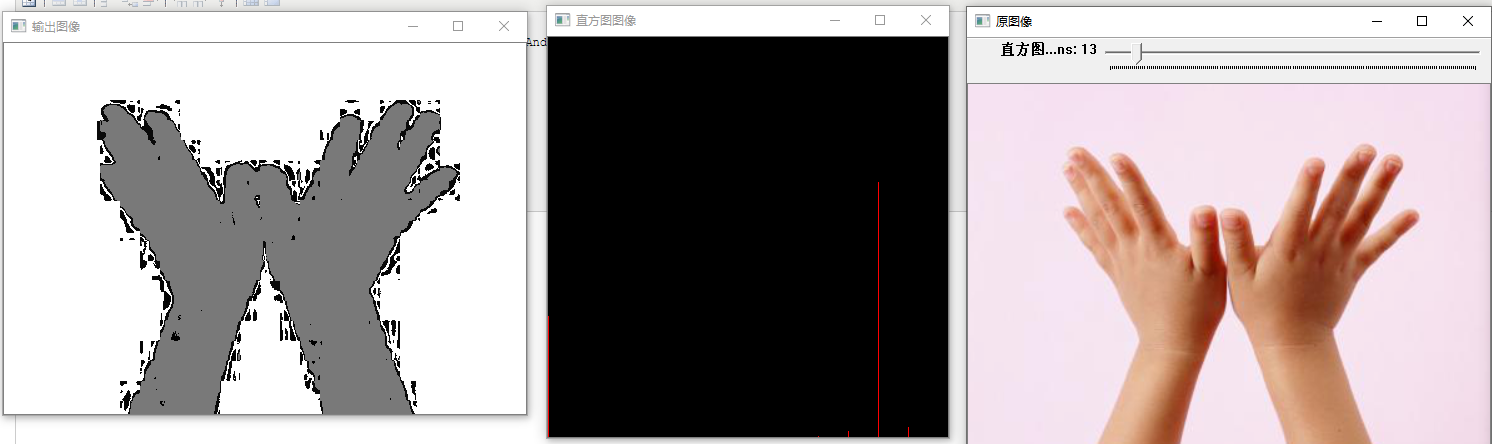
(3)反向投影图
4 4 4 4
4 4 4 4
6 6 6 6
6 6 2 2
说明:位置(0,0)上的像素值为0,对应的bin为[0,3],所以反向直方图在该位置上的值这个bin的值4
实例
7.png

#include<opencv2/opencv.hpp> #include<iostream> cv::Mat backProjectionImg; void Hist_And_BackProjection(int bins, void* hue1) { //自定义函数 float range[] = { 0,180 }; const float* histRanges = { range }; int hist_h = 400; int hist_w = 400; int bin_w = hist_w / bins; cv::Mat h_hist; cv::Mat histImage(hist_w, hist_h, CV_8UC3, cv::Scalar(0, 0, 0)); //直方图计算及归一化处理 cv::Mat hue = *(cv::Mat*)(hue1); //void*转换成cv::Mat calcHist(&hue, 1, 0, cv::Mat(), h_hist, 1, &bins, &histRanges, true, false);//直方图计算 normalize(h_hist, h_hist, 0, 255, cv::NORM_MINMAX, -1, cv::Mat()); calcBackProject(&hue, 1, 0, h_hist, backProjectionImg, &histRanges, 1, true); //直方图反向投影 /* 参数1:Mat* images:输入图像,图像深度必须是CV_8U, CV_16U或CV_32F中的一种,尺寸相同,每一幅图像都可以有任意的通道数 参数2:int 输入图像的数量 参数3:int* channels : 用于计算反向投影的通道列表,通道数必须与直方图维度相匹配,第一个数组的通道是从0到image[0].channels() - 1, 第二个数组通道从图像image[0].channels()到image[0].channels() + image[1].channels() - 1计数 参数4:输入的直方图,直方图的bin可以是密集(dense)或稀疏(sparse) 参数5:反向投影输出图像,是一个单通道图像,与原图像有相同的尺寸和深度 参数6:直方图中bin的取值范围 参数7:double scale = 1 : 可选输出反向投影的比例因子 输出8:bool uniform = true : 直方图是否均匀分布(uniform)的标识符,有默认值true */ //画直方图分部图 for (int i = 0; i < bins; i++) { rectangle(histImage, cv::Point((i) * bin_w, (hist_h - cvRound(h_hist.at<float>(i) * (400 / 255)))), cv::Point(i * bin_w, hist_h), cv::Scalar(0, 0, 255), -1); } imshow("输出图像", backProjectionImg); imshow("直方图图像", histImage); } int main(int argc, char** argv) { cv::Mat src, hsv_src, hue, backProjectionImg; int bins = 12; int nchannels[] = { 0,0 };//通道复制对应信息 src = cv::imread("D:/bb/tu/7.png"); if (!src.data) { std::cout << "图像载入错误.\n"; return -1; } cvtColor(src, hsv_src, cv::COLOR_BGR2HSV); //将图像转化为HSV图像 hue.create(hsv_src.size(), hsv_src.depth());//创建一个图像 mixChannels(&hsv_src, 1, &hue, 1, nchannels, 1);//通道复制 //把hsv_src的0通道复制到hue的0通道 //窗口命名 namedWindow("原图像", cv::WINDOW_AUTOSIZE); namedWindow("输出图像", cv::WINDOW_AUTOSIZE); namedWindow("直方图图像", cv::WINDOW_AUTOSIZE); imshow("原图像", src); cv::createTrackbar("直方图区段数bins", "原图像", &bins, 180, Hist_And_BackProjection,&hue);//创建滑动条 Hist_And_BackProjection(bins, &hue); cv::waitKey(0); return 0; }







【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
2020-01-17 python-opencv-绘图函数
2020-01-17 python-opencv-图片的裁剪
2020-01-17 opencv-插值算法介绍
2020-01-17 python-opencv-图像缩放