opencv-logPolar对数极坐标转换成笛卡尔坐标

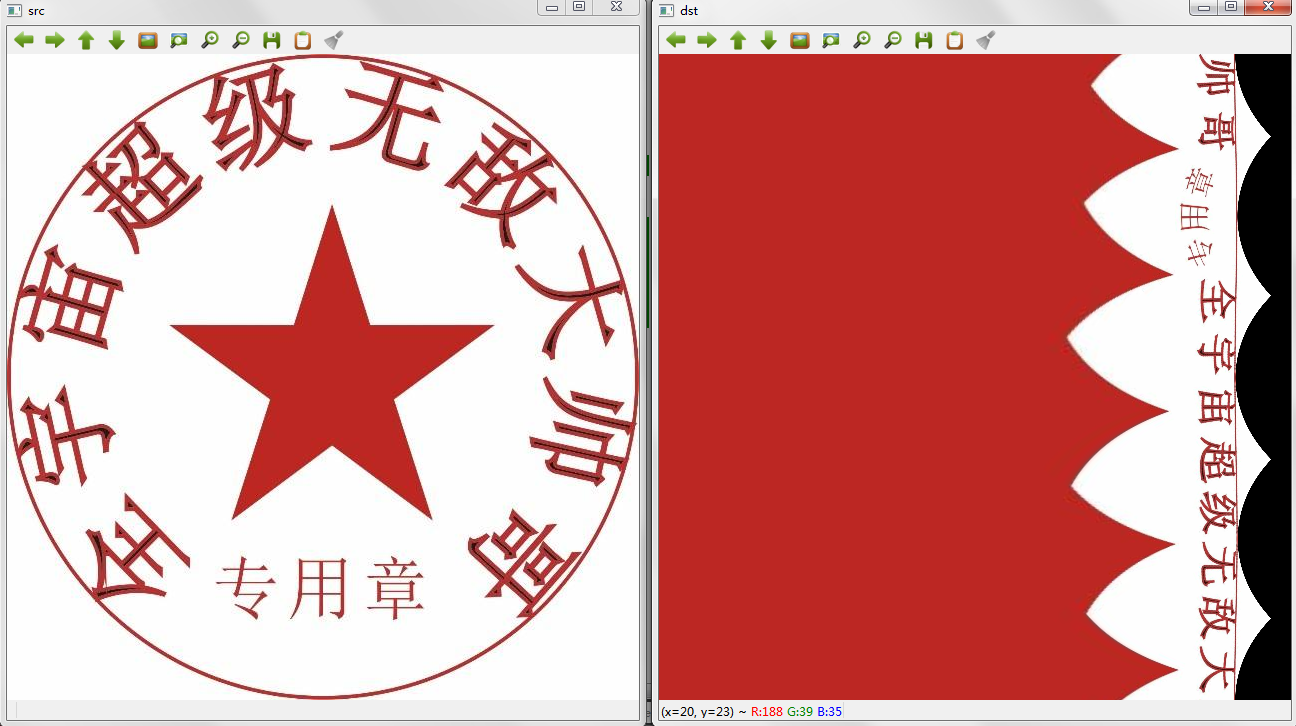
logPolar与 linearPolar在效果上的区别:
linearPolar在区域内影响度是均匀的;logPolar越靠近原点影响度越大
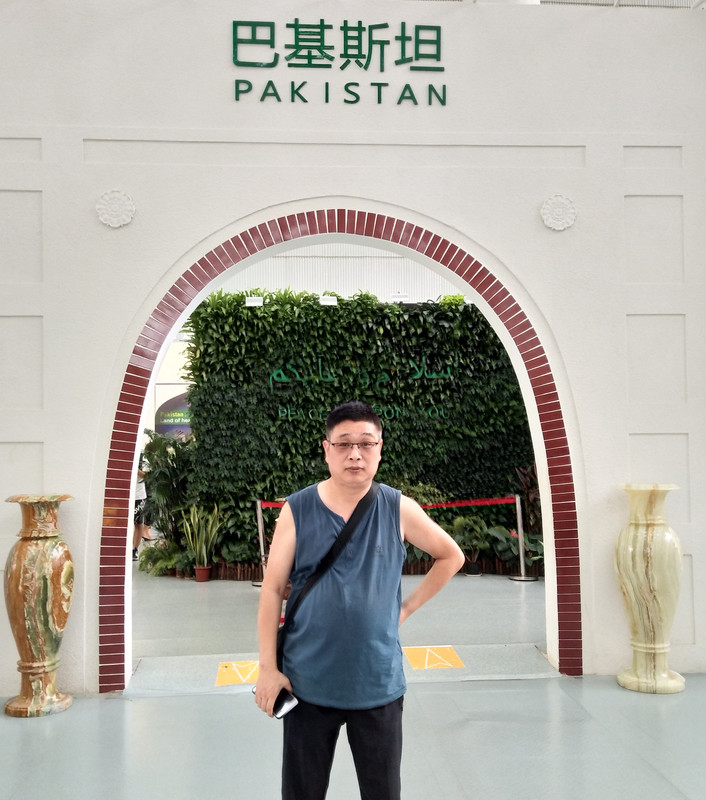
11.jpg


cv::Mat src = cv::imread("D:/bb/tu/11.jpg"); cv::imshow("src",src); cv::Mat dst; cv::logPolar(src,dst,cv::Point2f(src.cols/2,src.rows/2),100,cv::INTER_LINEAR + cv::WARP_FILL_OUTLIERS ); /* 参数3:极坐标中心 参数4:尺度参数--【值越大 离原点越近影响越大】 参数5:cv::INTER_LINEAR插值算法 cv::WARP_FILL_OUTLIERS 超出图像边界区域如何处理 cv::WARP_INVERSE_MAP 未设置表示转换成极坐标(正变换 dst(phi,rho)<-src(x,y)) 设置表示由极坐标变回直角坐标(逆变换 dst(x,y)<-src(phi,rho)) */ imshow("dst", dst);







【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)