opencv-Canny边缘检测

2.jpg

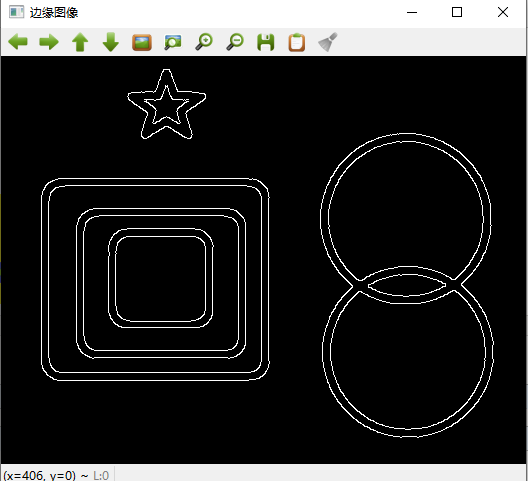
cv::Mat imageSource = cv::imread("D:/bb/tu/2.jpg",0); cv::namedWindow("原图像"); cv::imshow("原图像",imageSource); cv::Mat image; cv::GaussianBlur(imageSource,image,cv::Size(3,3),0);//过滤 cv::Canny(image,image,50,100); //边缘检测 //第一个参数:输入图像(八位的图像) //第二个参数:输出的边缘图像 //第三个参数:下限阈值,如果像素梯度低于下限阈值,则将像素不被认为边缘 //第四个参数:上限阈值,如果像素梯度高于上限阈值,则将像素被认为是边缘(建议上限是下限的2倍或者3倍) //在阈值1和阈值2之间的像素点,若与第2步得到的边缘像素点相邻,则被认为是边缘,否则被认为不是边缘 //第五个参数:为Sobel()运算提供内核大小,默认值为3 //第六个参数:是否采用更精确的方式计算图像梯度,默认值为false cv::namedWindow("边缘图像"); cv::imshow("边缘图像",image);







【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 基于Microsoft.Extensions.AI核心库实现RAG应用
· Linux系列:如何用heaptrack跟踪.NET程序的非托管内存泄露
· 开发者必知的日志记录最佳实践
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 单元测试从入门到精通
· 上周热点回顾(3.3-3.9)
2020-11-13 Arduino专用绘图软件Fritzing
2020-11-13 点亮LED灯
2020-11-13 李雪倩重大疾病保险:
2020-11-13 实例-点亮Arduino板子上的LED灯