
论文阅读(Weilin Huang——【ECCV2016】Detecting Text in Natural Image with Connectionist Text Proposal Network)
Weilin Huang——【ECCV2016】Detecting Text in Natural Image with Connectionist Text Proposal Network
目录
- 作者和相关链接
- 几个关键的Idea出发点
- 方法概括
- 方法细节
- 实验结果
- 总结与收获点
作者和相关链接

几个关键的Idea出发点
-
文本检测和一般目标检测的不同——文本线是一个sequence(字符、字符的一部分、多字符组成的一个sequence),而不是一般目标检测中只有一个独立的目标。这既是优势,也是难点。优势体现在同一文本线上不同字符可以互相利用上下文,可以用sequence的方法比如RNN来表示。难点体现在要检测出一个完整的文本线,同一文本线上不同字符可能差异大,距离远,要作为一个整体检测出来难度比单个目标更大——因此,作者认为预测文本的竖直位置(文本bounding box的上下边界)比水平位置(文本bounding box的左右边界)更容易。
-
Top-down(先检测文本区域,再找出文本线)的文本检测方法比传统的bottom-up的检测方法(先检测字符,再串成文本线)更好。自底向上的方法的缺点在于(这点在作者的另一篇文章中说的更清楚),总结起来就是没有考虑上下文,不够鲁棒,系统需要太多子模块,太复杂且误差逐步积累,性能受限。
- RNN和CNN的无缝结合可以提高检测精度。CNN用来提取深度特征,RNN用来序列的特征识别(2类),二者无缝结合,用在检测上性能更好。
方法概括
-
基本流程如Fig 1, 整个检测分六步:
- 第一,用VGG16的前5个Conv stage(到conv5)得到feature map(W*H*C)
- 第二,在Conv5的feature map的每个位置上取3*3*C的窗口的特征,这些特征将用于预测该位置k个anchor(anchor的定义和Faster RCNN类似)对应的类别信息,位置信息。
- 第三,将每一行的所有窗口对应的3*3*C的特征(W*3*3*C)输入到RNN(BLSTM)中,得到W*256的输出
- 第四,将RNN的W*256输入到512维的fc层
- 第五,fc层特征输入到三个分类或者回归层中。第二个2k scores 表示的是k个anchor的类别信息(是字符或不是字符)。第一个2k vertical coordinate和第三个k side-refinement是用来回归k个anchor的位置信息。2k vertical coordinate表示的是bounding box的高度和中心的y轴坐标(可以决定上下边界),k个side-refinement表示的bounding box的水平平移量。这边注意,只用了3个参数表示回归的bounding box,因为这里默认了每个anchor的width是16,且不再变化(VGG16的conv5的stride是16)。回归出来的box如Fig.1中那些红色的细长矩形,它们的宽度是一定的。
- 第六,用简单的文本线构造算法,把分类得到的文字的proposal(图Fig.1(b)中的细长的矩形)合并成文本线
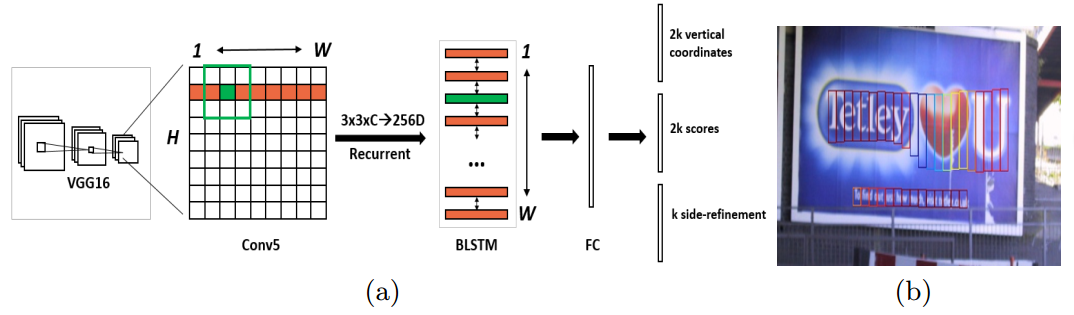
Fig. 1: (a) Architecture of the Connectionist Text Proposal Network (CTPN). We densely slide a 3×3 spatial window through the last convolutional maps (conv5 ) of the VGG16 model [27]. The sequential windows in each row are recurrently connected by a Bi-directional LSTM (BLSTM) [7], where the convolutional feature (3×3×C) of each window is used as input of the 256D BLSTM (including two 128D LSTMs). The RNN layer is connected to a 512D fully-connected layer, followed by the output layer, which jointly predicts text/non-text scores, y-axis coordinates and side-refinement offsets of k anchors. (b) The CTPN outputs sequential fixed-width fine-scale text proposals. Color of each box indicates the text/non-text score. Only the boxes with positive scores are presented.
方法细节
-
Detecting Text in Fine-scale proposals
- k个anchor尺度和长宽比设置:宽度都是16,k = 10,高度从11~273(每次除于0.7)
- 回归的高度和bounding box的中心的y坐标如下,带*的表示是groundTruth,带a的表示是anchor

-
- score阈值设置:0.7 (+NMS)
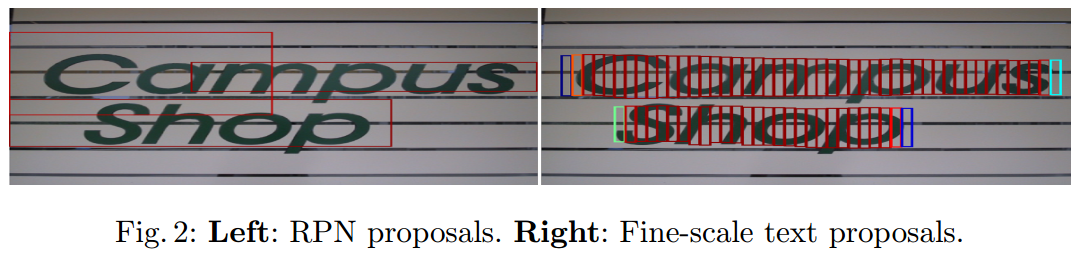
- 一般的RPN和采用本文的方法检测出的效果对比
-
Recurrent Connectionist Text Proposals
- RNN类型:BLSTM(双向LSTM),每个LSTM有128个隐含层
- RNN输入:每个滑动窗口的3*3*C的特征(可以拉成一列),同一行的窗口的特征形成一个序列
- RNN输出:每个窗口对应256维特征
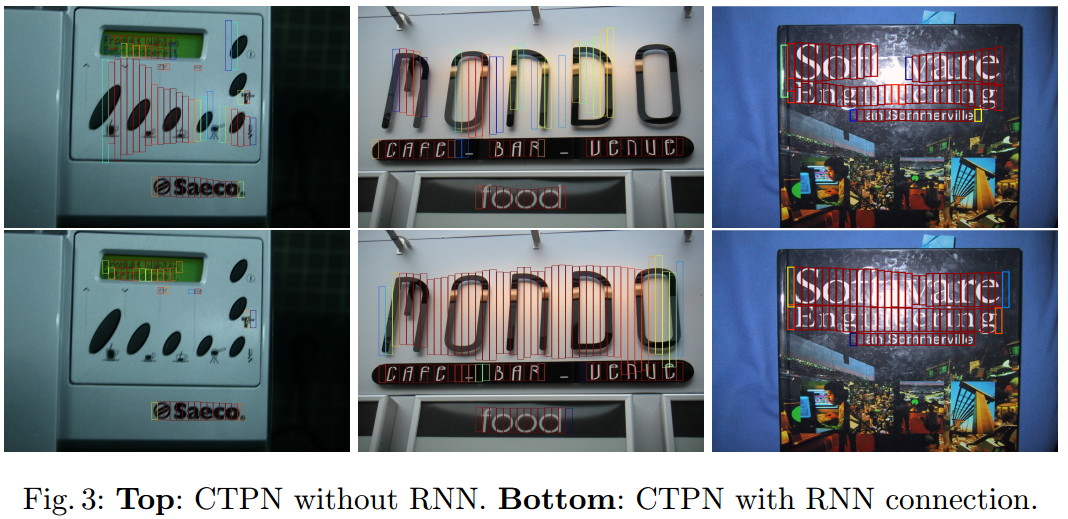
- 使用RNN和不适用RNN的效果对比,CTPN是本文的方法(Connectionist Text Proposal Network)
-
Side-refinement
- 文本线构造算法(多个细长的proposal合并成一条文本线)
- 主要思想:每两个相近的proposal组成一个pair,合并不同的pair直到无法再合并为止(没有公共元素)
- 判断两个proposal,Bi和Bj组成pair的条件:
- Bj->Bi, 且Bi->Bj。(Bj->Bi表示Bj是Bi的最好邻居)
- Bj->Bi条件1:Bj是Bi的邻居中距离Bi最近的,且该距离小于50个像素
- Bj->Bi条件2:Bj和Bi的vertical overlap大于0.7
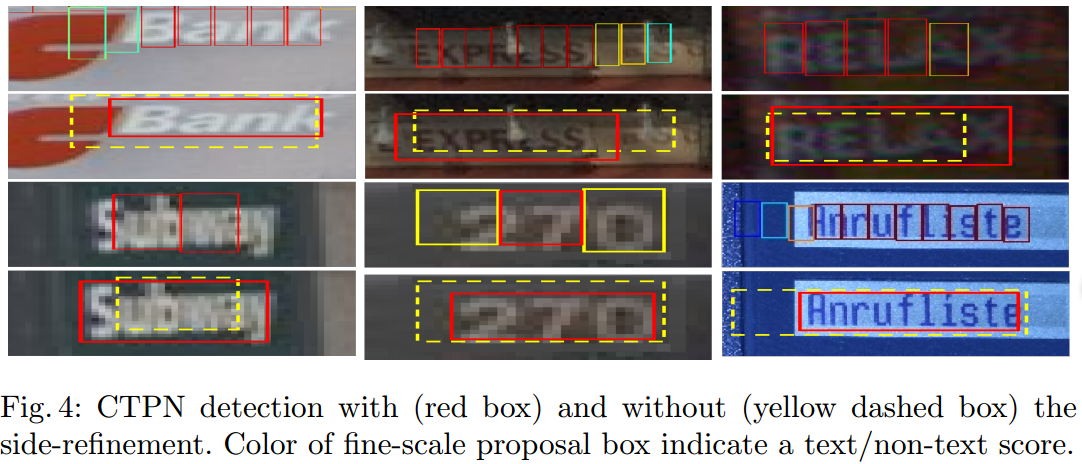
- 固定要regression的box的宽度和水平位置会导致predict的box的水平位置不准确,所以作者引入了side-refinement,用于水平位置的regression。where xside is the predicted x-coordinate of the nearest horizontal side (e.g., left or right side) to current anchor. x∗ side is the ground truth (GT) side coordinate in x-axis, which is pre-computed from the GT bounding box and anchor location. cax is the center of anchor in x-axis. wa is the width of anchor, which is fixed, wa = 16
- 文本线构造算法(多个细长的proposal合并成一条文本线)

-
- 使用side-refinement的效果对比
实验结果
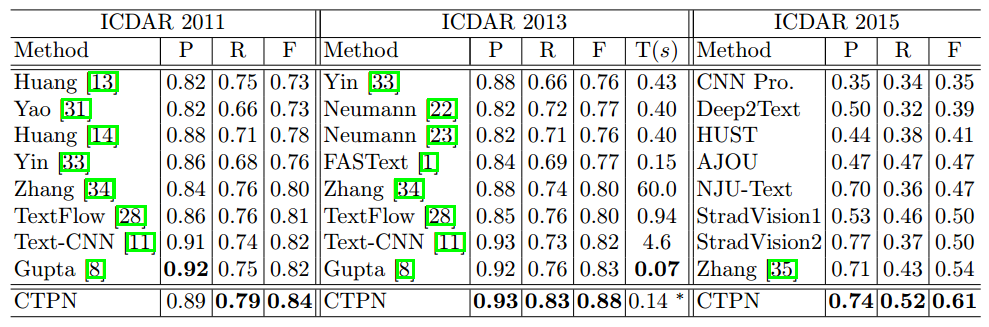
- 时间:0.14s with GPU
- ICDAR2011,ICDAR2013,ICDAR2015库上检测结果
总结与收获点
- 这篇文章的方法最大亮点在于把RNN引入检测问题(以前一般做识别)。文本检测,先用CNN得到深度特征,然后用固定宽度的anchor来检测text proposal(文本线的一部分),并把同一行anchor对应的特征串成序列,输入到RNN中,最后用全连接层来分类或回归,并将正确的text proposal进行合并成文本线。这种把RNN和CNN无缝结合的方法提高了检测精度。

