
工作日志(二)
个人编程作业——轨迹插补完善
轨迹插补中有两个函数模块——指令发送和轨迹生成。指令发送函数发送的数据有:
new_cmd.Request = false;
new_cmd.Response = false;
new_cmd.Done = false;
new_cmd.Position = 0;
new_cmd.Velocity = 0;
new_cmd.Acceleration = 0;
new_cmd.Deceleration = 0;
new_cmd.Jerk = 0;
以上是他们的初始状态。
算法原理:
- 当循环次数达到5次时,将Request置1,即开始发送数据;
- 轨迹生成函数得到Request为真的信息后,先将Response 置1,然后开始生成轨迹;
- 要求生成梯形轨迹插补,其特点是Acceleration =Deceleration ,方向相反。
- 已经从指令中得到目标位置Position,匀速时的速度Velocity,要求的加速度Acceleration及减速度Deceleration,那么轨迹插补时,以距离将插补分为三段:
令:
double p=new_cmd.Position;
double v=new_cmd.Velocity;
double a=new_cmd.Acceleration;
double d=new_cmd.Deceleration;则
if(axis1_setpoint.Position < vv/(2a)),匀加速段;
else if(axis1_setpoint.Position < p - v*v/d),匀速段;
else if(axis1_setpoint.Position < p),匀减速段。
具体插补过程如下:
- 设置插补周期T;
- 在一个插补周期中认为是匀速运动,给出速度和目标位置;
- 当插补周期足够小时,插补轨迹无线接近于梯形轨迹。
代码实现:
double T=10;// 插补周期
void task_trajectory_generator_proc(void *arg)
{
RTIME now, previous;
/*
* Arguments: &task (NULL=self),
* start time,
* period (here: 1 s)
*/
rt_task_set_periodic(NULL, TM_NOW, 1000000000);
previous = rt_timer_read();
axis1_setpoint.Position = 0;
axis1_setpoint.Velocity = 0;
while (1) {
rt_task_wait_period(NULL);
now = rt_timer_read();
/*
* NOTE: printf may have unexpected impact on the timing of
* your program. It is used here in the critical loop
* only for demonstration purposes.
*/
// printf("Task A Time since last turn: %ld.%06ld ms\n",
// (long)(now - previous) / 1000000,
// (long)(now - previous) % 1000000);
previous = now;
// Add your code
if(new_cmd.Request)
{
new_cmd.Response = true;
double p=new_cmd.Position;
double v=new_cmd.Velocity;
double a=new_cmd.Acceleration;
double d=new_cmd.Deceleration;
// printf("p,v,a,d: %f.%f.%f.%f \n",
// p,
// v,
// a,
// d);
//accelerate
if(axis1_setpoint.Position < v*v/(2*a))
{
axis1_setpoint.Velocity += a*T;
axis1_setpoint.Position += axis1_setpoint.Velocity*T;
printf("Position1:%f\n",axis1_setpoint.Position);
}
//constant motion
else if(axis1_setpoint.Position < p - v*v/d)
{
axis1_setpoint.Velocity = v;
axis1_setpoint.Position += v*T;
printf("Position2:%f\n",axis1_setpoint.Position);
}
//Decelerate
else if(axis1_setpoint.Position < p)
{
axis1_setpoint.Position += axis1_setpoint.Velocity*T;
axis1_setpoint.Velocity -= d*T;
printf("Position3:%f\n",axis1_setpoint.Position);
}
new_cmd.Done = true;
}
}
}
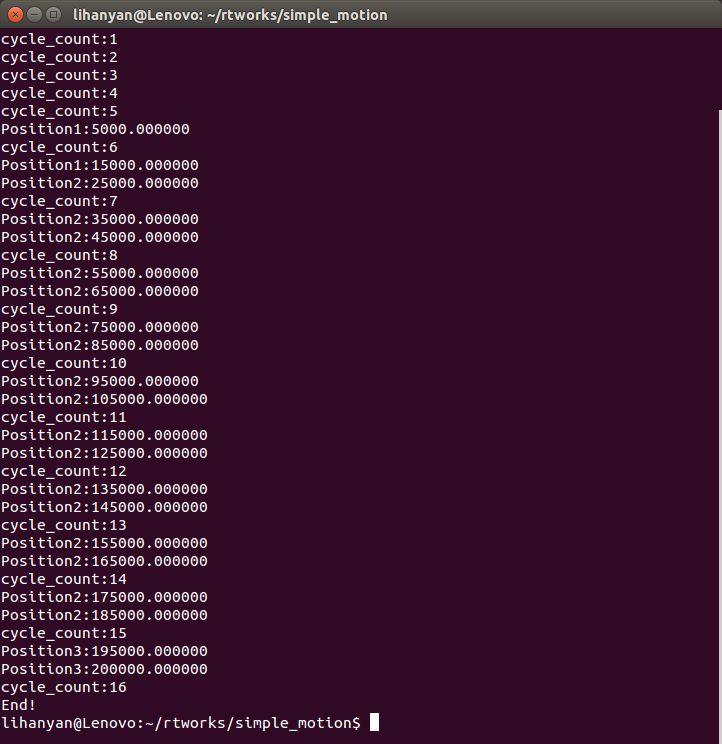
当到达目标位置时,将Done置1,程序结束。
运行结果图:

【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】凌霞软件回馈社区,博客园 & 1Panel & Halo 联合会员上线
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步