2.制作第一个驱动程序
先讲解驱动框架,然后写出first_drv驱动程序,来打印一些信息
写出first_drv驱动程序需要以下几步:
(1)写出驱动程序first_drv_open first_drv_write
(2)需要定义file_operations结构体来封装驱动函数first_drv_open first_drv_write
对于字符设备来说,常用file_operations以下几个成员:
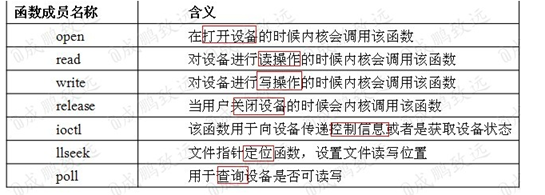
(3) 模块加载函数,通过函数 register_chrdev(major, “first_drv”, &first_drv_fops) 来
注册字符设备
(4)写驱动的first_drv_init 入口函数来调用这个register_chrdev()注册函数,
(5)通过module_init()来修饰入口函数,使内核知道有这个函数
(6)写驱动的first_drv_exit出口函数,调用这个unregister_chrdev()函数卸载,
(7) 通过module_exit()来修饰出口函数
(8) 模块许可证声明, 最常见的是以MODULE_LICENSE( "GPL v2" )来声明
1.首先创建first_drv.c文件
代码如下:

#include <linux/module.h> #include <linux/kernel.h> #include <linux/fs.h> #include <linux/init.h> #include <linux/delay.h> #include <asm/irq.h> #include <asm/arch/regs-gpio.h> #include <asm/hardware.h> #include <asm/uaccess.h> #include <asm/io.h> /*1写出驱动程序first_drv_open first_drv_write */ /* inode结构表示具体的文件,file结构体用来追踪文件在运行时的状态信息。*/ static int first_drv_open(struct inode *inode, struct file *file) { printk(“first_drv_open\n”); //打印,在内核中打印只能用printk() return 0; } /*参数filp为目标文件结构体指针,buffer为要写入文件的信息缓冲区,count为要写入信息的长度,ppos为当前的偏移位置,这个值通常是用来判断写文件是否越界*/ static ssize_t first_drv_write(struct file *file, const char __user *buf, size_t count, loff_t * ppos) { printk(“first_drv_write\n”); //打印,在内核中打印只能用printk() return 0; } /*2定义file_operations结构体来封装驱动函数first_drv_open first_drv_write */ static struct file_operations first_drv_fops = { .owner = THIS_MODULE, //被使用时阻止模块被卸载 .open = first_drv_open, .write = first_drv_write, }; /*4写first_drv_init入口函数来调用这个register_chrdev()注册函数*/ int first_drv_init(void) { /*3 register_chrdev注册字符设备,并设置major=111*/ /*如果设置major为0,表示由内核动态分配主设备号,函数的返回值是主设备号*/ register_chrdev (111, “first_drv”, &first_drv_fops); //111:主设备号,”first_drv”:设备名 /* register_chrdev作用:在VFS虚拟文件系统中找到字符设备,然后通过主设备号找到内核数组里对应的位置,最后将设备名字和fops结构体填进去 */ return 0; } /*5 module_init修饰入口函数*/ module_init(first_drv_init); /*6 写first_drv_exit出口函数*/ void first_drv_exit(void) { unregister_chrdev (111, “first_drv”); //卸载驱动,只需要主设备号和设备名就行 } /*7 module_exit修饰出口函数*/ module_exit(first_drv_exit); /*8许可证声明, 描述内核模块的许可权限,如果不声明LICENSE,模块被加载时,将收到内核被污染 (kernel tainted)的警告。*/ MODULE_LICENSE( "GPL v2" );
2然后写Makefile编译脚本:
KERN_DIR = /work/system/linux-2.6.22.6 //依赖的内核目录,前提内核是编译好的 all: make -C $(KERN_DIR) M=`pwd` modules
// M=`pwd`:指定当前目录 //make -C $(KERN_DIR) 表示将进入(KERN_DIR)目录,执行该目录下的Makefile
//等价于在linux-2.6.22.6目录下执行: make M=(当前目录) modules // modules:要编译的目标文件 clean: make -C $(KERN_DIR) M=`pwd` modules clean rm -rf modules.order obj-m += frist_drv.o //obj-m:内核模块文件,指将myleds.o编译成myleds.ko
3. make,编译生成frist_drv.ko文件

4.然后开发板通过nfs网络文件系统来加载frist_drv.ko
加载之前首先通过 cat /proc/devices来查看字符主设备号111是否被占用
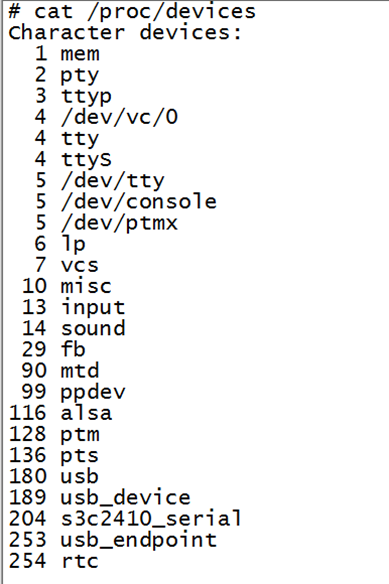
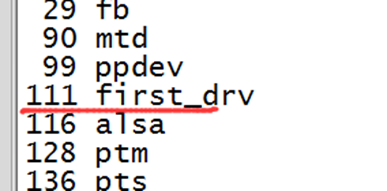
然后通过 insmod first_drv.ko来挂载, 通过 cat /proc/devices就能看到first_drv已挂载好
5.通过测试程序测试frist_drv模块
测试程序first_driver_text.c代码如下
#include <sys/types.h> //调用sys目录下types.h文件 #include <sys/stat.h> //stat.h获取文件属性 #include <fcntl.h> #include <stdio.h> /*输入”./first_driver_text”, agc就等于1, argv[0]= first_driver_text */ /*输入”./first_driver_text on”, agc就等于2, argv[0]= first_driver_text,argv[1]=on; */ int main(int argc,char **argv) { int fd1, fd2; int val=1; fd1 = open("/dev/xxx",O_RDWR); //打开/dev/xxx设备节点 if(fd1<0) //无法打开,返回-1 printf("can't open%d!\n", fd1); else printf("can open%d!\n", fd1); //打开,返回文件描述符
write(fd1, &val, 4); //写入数据1 return 0; }
6.然后arm-linux-gcc -o first_driver_text first_driver_text.c生成执行文件
回到板子串口上使用./first_driver_text来运行,发现如果open()打不开,会返回-1

是因为我们没有创建dev/xxx这个设备节点,然后我们来创建,使它等于刚刚挂载好的first_drv模块
mknod -m 660 /dev/xxx c 111 0 // first_drv模块的主设备号=111
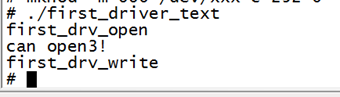
./first_driver_text
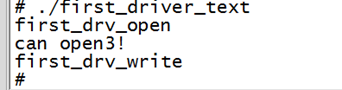
结果如上图,发现测试程序里的open()函数调用了驱动中的first_drv_open()
write()函数调用了驱动中的first_drv_write(),
其中open()函数返回值为3,是因为描述符0,1,2都已经被控制台占用了,所以从3开始
7.改进底层驱动,使用动态装载:
除了静态装载驱动外,还可以动态装载,让系统自动为我们驱动设备自动分配设备号
7.1 修改first_drv_init入口函数和first_drv_exit 出口函数:
代码如下:
int major; //定义一个全局变量,用来保存主设备号 int first_drv_init(void) { /*设置major为0,由内核动态分配主设备号,函数的返回值是主设备号*/ major =register_chrdev (0, “first_drv”, &first_drv_fops); return 0; } void first_drv_exit(void) { unregister_chrdev (major, “first_drv”); //卸载驱动, 将major填入即可 }
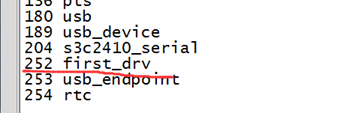
如下图,通过动态分配得出它的主设备号是252,然后重创252的测试程序
rm dev/xxx
mknod -m 660 /dev/xxx c 252 0
./first_driver_text
7.2 每次都要手工创建设备节点,大家肯定也会觉得这样做太麻烦了。
可以使用自动创建设备节点,Linux有udev、mdev的机制,而我们的ARM开发板上移植的busybox有mdev机制,然后mdev机制会通过class类来找到相应类的驱动设备来自动创建设备节点 (前提需要有mdev)
在哪里设置了mdev机制?
在制作根文件系统之使用里有介绍
7.3 接下来使用insmod自动创建设备节点, rmmod自动注销设备节点
(1)首先创建一个class设备类,class是一个设备的高级视图,它抽象出低级的实现细节,然后在class类下,创建一个class_device,即类下面创建类的设备:(在C语言中class就是个结构体)
static struct class *firstdrv_class; //创建一个class类 static struct class_device *firstdrv_class_devs; //创建类的设备
(2)在first_drv_init入口函数中添加:
firstdrv_class= class_create(THIS_MODULE,"firstdrv"); //创建类,它会在sys/class目录下创建firstdrv_class这个类 firstdrv_class_devs=class_device_create(firstdrv_class,NULL,MKDEV(major,0),NULL,"xyz"); //创建类设备,会在sys/class/firstdrv_class类下创建xyz设备,然后mdev通过这个自动创建/dev/xyz这个设备节点,
(3)在first_drv_exit出口函数中添加:
class_device_unregister(firstdrv_class_devs); //注销类设备,与class_device_create对应 class_destroy(firstdrv_class); //注销类,与class_create对应
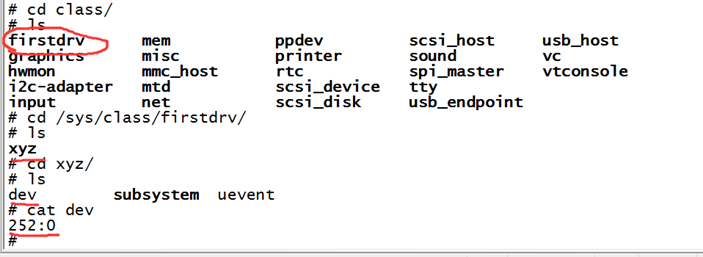
重新编译insmod后,会发现在/dev下自动的创建了xyz设备节点

其中在sys/class里有各种类的设备, 比如sys/class/fristdev下就有xyz
然后mdv通过insmod xxx 就去class找到相应类的驱动设备来自动创建设备节点
为什么内容一更改,mdv就能自动运行创建设备节点呢?
是因为以前创建根文件系统时候,
在etc/init.d/rcS里添加了这么一段:
1 | echo /sbin/mdev > /proc/sys/kernel/hotplug //支持热拔插 |
然后kernel每当设备出现变动时,调用/sbin/mdev来处理对应的信息,使mdev应用程序操作/dev目录下的设备,进行添加或删除
(4).再修改测试程序里open函数,将/dev/xxx改为/dev/xyz,这样就测试模块,就不需要再mknod了.
驱动程序first_drv_open first_drv_write中只是打印数据,接下来下一节便开始来点亮LED.
人间有真情,人间有真爱。


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· SQL Server 2025 AI相关能力初探
· Linux系列:如何用 C#调用 C方法造成内存泄露
· AI与.NET技术实操系列(二):开始使用ML.NET
· 记一次.NET内存居高不下排查解决与启示
· 探究高空视频全景AR技术的实现原理
· 阿里最新开源QwQ-32B,效果媲美deepseek-r1满血版,部署成本又又又降低了!
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 开源Multi-agent AI智能体框架aevatar.ai,欢迎大家贡献代码
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· AI技术革命,工作效率10个最佳AI工具