【转】mipi-csi-2解读
COMS sensor 完全不顾人眼最适的800W像素,1200W,1300W不停向上搞。那么问题来了:这么高像素的IC,要达到30帧/S,这传输速率要多给力啊,所以,mipi传输协议打败了串口,并口的传输方式,成为现在的新宠。
MIPI ——Mobile industry process interface
多家移动开发或者应用商共同筹划
接口标准联盟
节约成本,加快产品开发速度
内容丰富,显示、照相机、电源管理、射频、存储接口等等
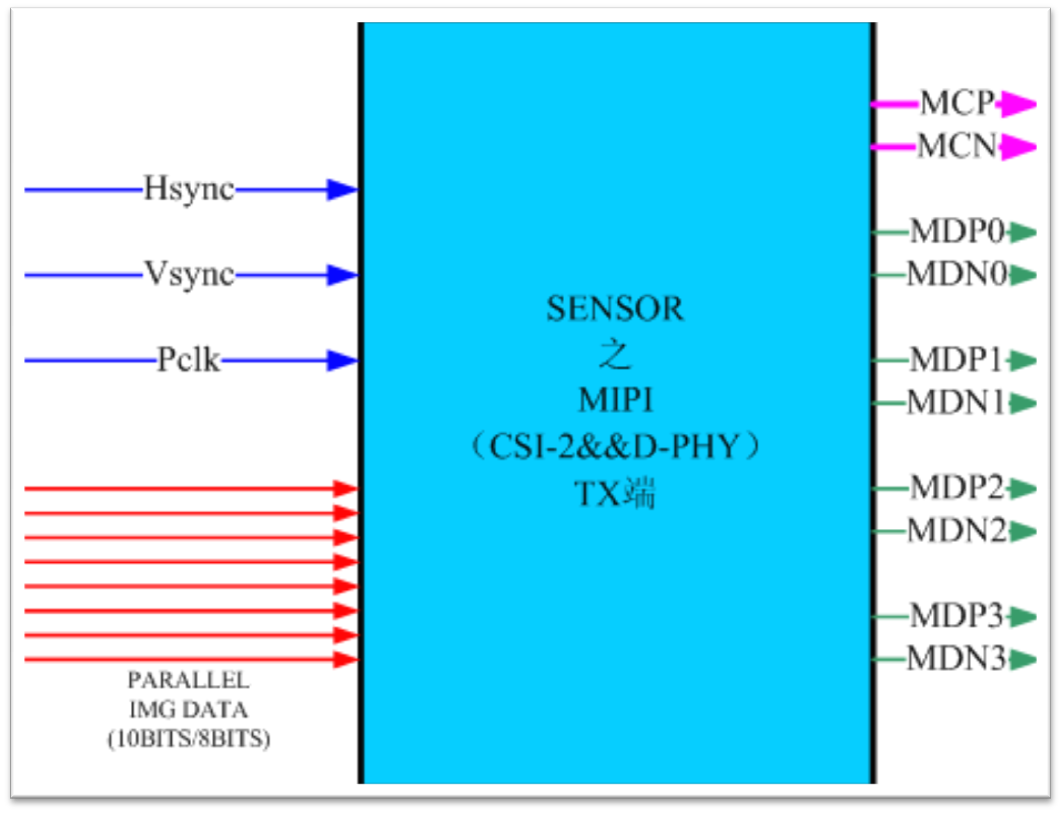
CIS(cmos image sensor)中仅用到了mipi协议中的csi-2(camera serial interface二代,标识生成要求)和D-phy(物理层,输出通道要求)
Camera端做transmitter,平台端做receiver
简而言之 mipi的作用就是:
1.数据并行转换成串行;
2.功能复用,节约传输线;
3.相对提高传输品质和速度;
4.增加传输距离;
5.适用新的平台需求;
为什么mipi那么NB,下面对比一下就照了。
并口需要
Vsync:帧同步信号
Hsync:行同步信号
和8条数据线,但这10根线,mipi只需要5根。所以,我行,我来!
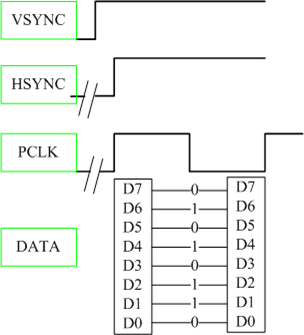
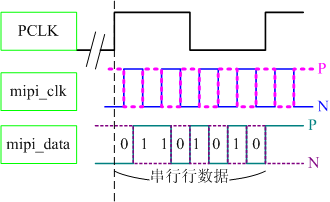
Clock和 data中体现差分即低位先出,故如此表示,差分信号P高N低表1,P低N高表0.
现在对mipi大概有点小小的概念了。再给你看看她的照片,保证你喜欢。MIPI 输出长什么样?
当当当当~~
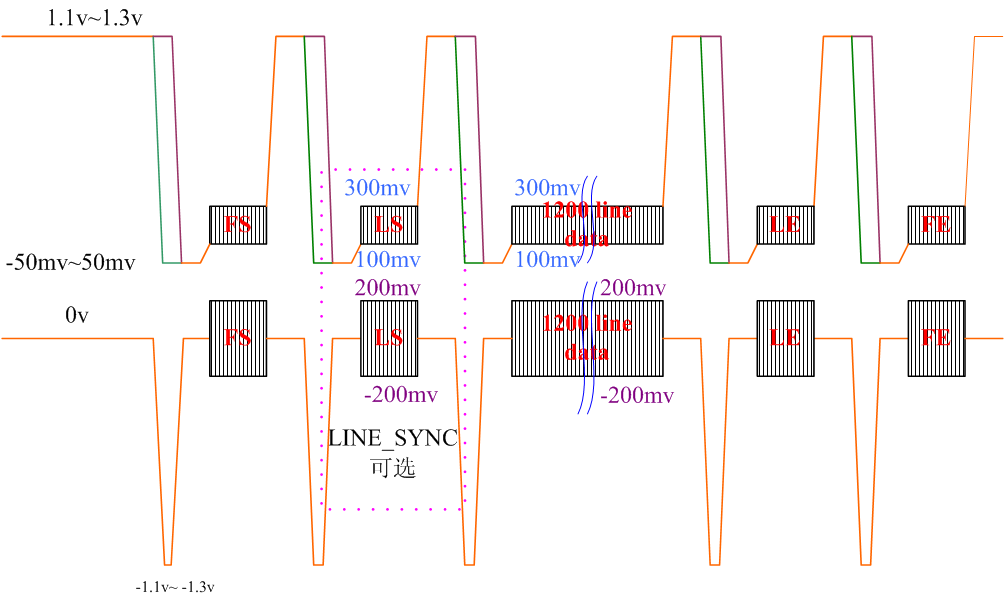
帧头标识、帧尾标识(分别由vsync上升下降沿生成)
行头标识、行尾标识(分别由hsync上升下降沿生成)
有效数据长包。包含行标识,所以可以省略line_sync短包
相对于并口传输,即是将vsync、hsync与数据共通道复用传输。
总之一句话,能用软件解决的一定不要动硬件,能动手的一定不要动嘴。人生哲理。
什么?不要看PS过的照片!好吧,下面发个素颜照。
是不是美如画。
而mipi的信号符合其通信协议,
规定其起始电压在1.1~1.3V,等等,如下图(我比较懒,不服来辩)。这是其电气要求。
然后软件方面,如下图:


字节(byte)为基本传输单元,每个byte中有8位(bit)
Sync dyte:用来同步数据开始,告知接下来为有效数据
DATA TYPE:该包传输的是什么格式的数据YUV422(1E)/RAW8(2A)/RAW10(2B)
WC(16bits)= PAYLOAD中的byte数量(即输出窗口的1行中有多少个字节,也即列数。注意raw10为列数的1.25倍,raw12为列数的1.5倍)
ECC:校验datatype和wc是否出错
Payload=image data
CSC:PAYLOAD数据传输校验
*由于插入了许多数据标识,所以会影响hb或者vb的最小值
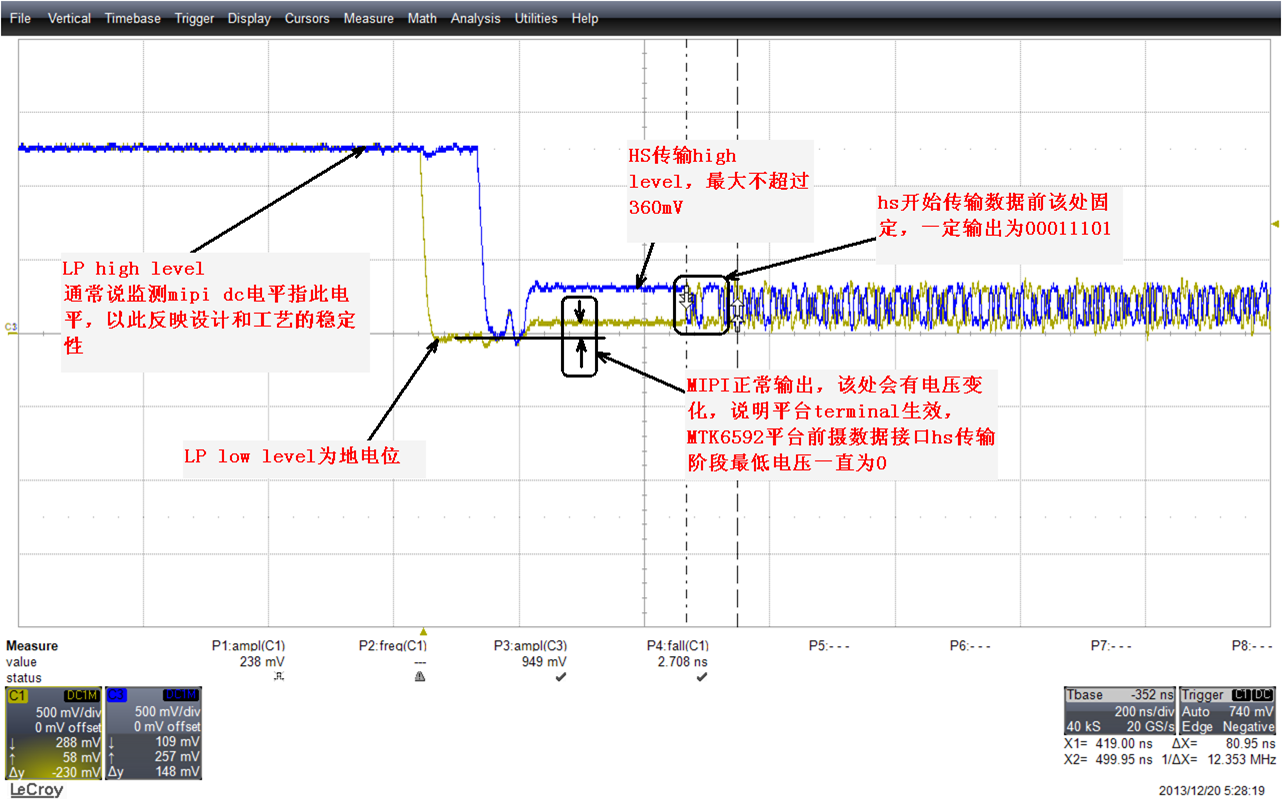
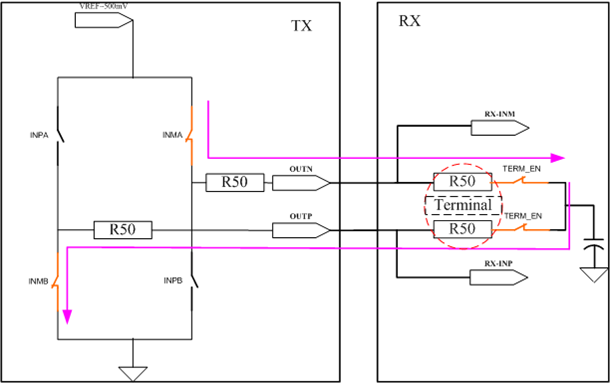
MIPI DPHY 终端概念
mipi的信号线是一对差分线,理论上可以高电平传一个数据,低电平也传一个,速度又快,功耗又小。
很多时候,平台端的mipi时序和Sensor端如果不匹配,就会出问题。硬件问题的话,就亮信号!
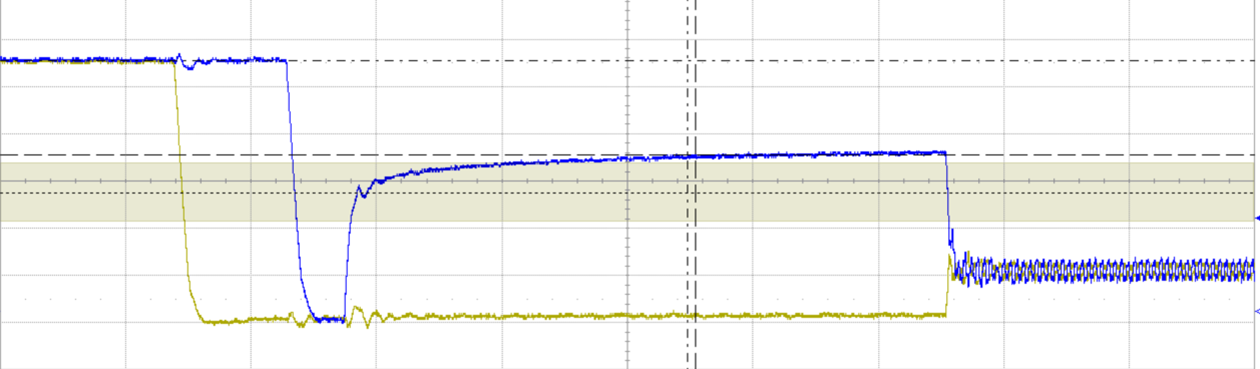
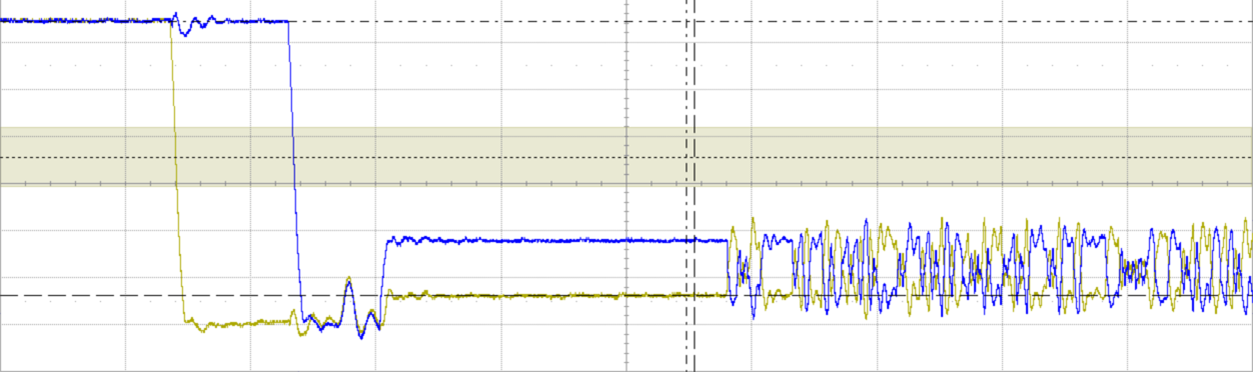
Term未连接情况信号时这样滴。正常的是这样滴:
Sensor输出在设计时已经考虑,应用时主要是FPC或者PCB走线影响
通常要求:
差分对内两线等长,尽量少折线,方向一致;
差分对间地线走地,减小串扰;
线上过孔最少;
至少一侧有铺地;
线长最长不超过20cm;
尽量远离天线;
目的:
阻抗匹配、阻抗连续,减少信号损失,获得较高的信号完整性;
减少信号间耦合,保证信号完整性;
减少与其他射频信号的相互作用,保证各信号的质量;
Settle count
主要是hs_prepare+hs_zero时间与其匹配;
通常设定T_settle count为T_(hs_prepare+hs_zero)/2;
是平台设定参数,通常不改默认值,与pclk频率有关;
不匹配会引起的问题:
卡顿;
不出图;
不规则滚屏、拍照分屏
调节方法:
增大或者减小T_hs_prepare、hs_zero,参数最小值为1,有时需要调的很不可思议才可行,这是需要配成manual模式。
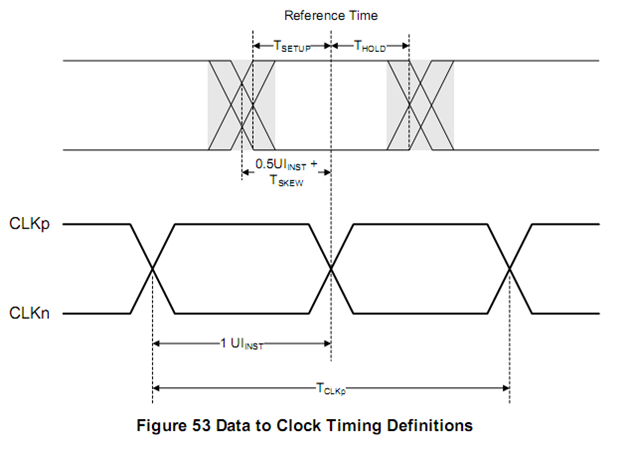
DDR采样,即在时钟的上升和下降沿均采集数据,保证高速传输又可以有效降低时钟频率,要求时钟和数据相位为正交关系。
实际中因为负载差异,会限制时钟的建立速度,同时数据的不规律输出(不是确定的输出序列),所以对setup或者hold时间要求不同。可能造成误码,引起麻点,严重时会丢行。
数据传输速率,单位为bps(bit per second)
mipi_data=pclk_tot*10(raw10)
=pclk_tot*8 (raw8)
pclk_tot=数字输出并行时钟pclk * 数字通道数M
mipi N通道,每通道数据率=mipi_data/N
Mipi时钟速度=每通道数据率/2= mipi_data/4

 浙公网安备 33010602011771号
浙公网安备 33010602011771号