
Opencv中Mat矩阵相乘——点乘、dot、mul运算详解
Mat矩阵点乘——A*B
Opencv重载了运算符“*”,姑且称之为Mat矩阵“点乘”,其中一个重载声明为:
CV_EXPORTS MatExpr operator * (const Mat& a, const Mat& b);点乘说明:
1. A*B是以数学运算中矩阵相乘的方式实现的,即Mat矩阵A和B被当做纯粹的矩阵做乘法运算,这就要求A的列数等 于B的行数时,才能定义两个矩阵相乘。如A是m×n矩阵,B是n×p矩阵,它们的乘积AB是一个m×p矩阵。

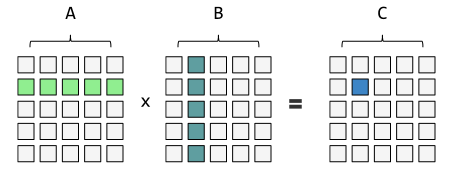
如上图所示,C=AB。C中第i行第j列所在元素C(i,j)等于A中第i行所有元素跟B中第j列所有元素一一对应的乘积之和。
更具有代表性的的:对于A、B都是2行2列矩阵的情况:


Opencv验证:
定义两个Mat矩阵A和B点乘,A为2行3列,B为3行2列:
输出:


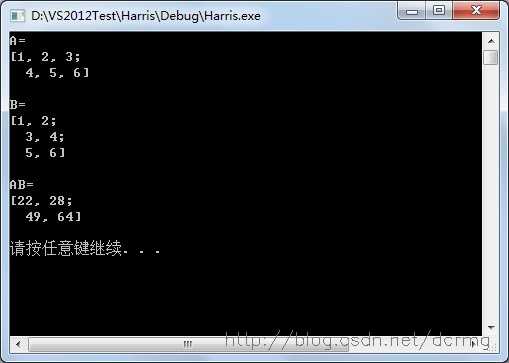
务必保证两个Mat矩阵中第一个矩阵A的列数等于第二个矩阵B的行数。
2. 参与点乘的两个Mat矩阵的数据类型(type)只能是 CV_32F、 CV_64FC1、 CV_32FC2、 CV_64FC2 这4种类 型中的一种。若选用其他类型,比如CV_8UC1,编译器会报错:

Mat矩阵dot——A.dot(B)
Opencv中.dot操作才算得上是真正的“点乘”,A.dot(B)操作相当于数学向量运算中的点乘,也叫向量的内积、数量积。
函数声明:
dot说明:
1. 对两个向量执行点乘运算,就是对这两个向量对应位一一相乘之后求和的操作,点乘的结果是一个标量。
对于向量a和向量b:


a和b的点积公式为:


要求向量a和向量b的行列数相同。
Mat矩阵的dot方法扩展了一维向量的点乘操作,把整个Mat矩阵扩展成一个行(列)向量,之后执行向量的点乘运算,仍然要求参与dot运算的两个Mat矩阵的行列数完全一致。
2. dot方法声明中显示返回值是double,所以A.dot(B)结果是一个double类型数据,不是Mat矩阵,不能把A.dot(B)结 果赋值给Mat矩阵!
Opencv验证:
运行结果:

若对AB声明为Mat,则在编译阶段就会报错。
3. dot操作不对参与运算的矩阵A、B的数据类型做要求,CV_8UC1、CV_32FC1等,可以是任何Opencv定义的类 型,如在2中使用的就是CV_8UC1。
4. 若参与dot运算的两个Mat矩阵是多通道的,则计算结果是所有通道单独计算各自.dot之后,再累计的和,结果仍是一个double类型数据。
Mat矩阵mul——A.mul(B)
Opencv中mul会计算两个Mat矩阵对应位的乘积,所以要求参与运算的矩阵A的行列和B的行列数一致。计算结果是跟A或B行列数一致的一个Mat矩阵。
Opencv中mul声明:
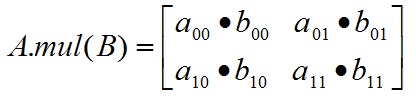
以简单的情况为例,对于2*2大小的Mat矩阵A和B:

对A和B执行mul运算:

mul说明:
1. mul操作不对参与运算的两个矩阵A、B有数据类型上的要求,但要求A,B类型一致,不然报错;
2. Mat AB=A.mul(B),若声明AB时没有定义AB的数据类型,则默认AB的数据类型跟A和B保存一致;
3. 若AB精度不够,可能产生溢出,溢出的值被置为当前精度下的最大值;
Opencv验证:
输出:
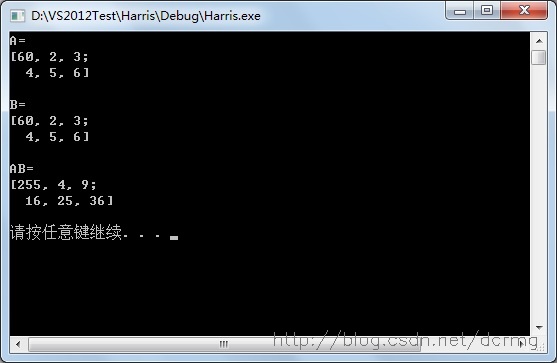

AB中第一个元素应该为60*60=360,但AB默认的类型为CV_8UC1,即最大值只能是255;所以执行mul运算一定要定义AB足够的精度,防止溢出。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号