
在MAC上配置好PX4开发环境后(配置方法),即可进行联合数字仿真。
- 打开 terminal ,执行以下语句:
>>cd ~
>>cd Firmware
>>export PX4_HOME_LAT=28.452386 #定义四旋翼起始经纬高
>>export PX4_HOME_LON=-13.867138 #定义四旋翼起始经纬高
>>export PX4_HOME_ALT=28.5 #定义四旋翼起始经纬高
>>make posix_sitl_default jmavsim
>>commander takeoff #四旋翼起飞
注意1:若执行commander takeoff时报错,则等待出现“EKF commencing GPS fusion”信息后再执行该语句!
注意2:软件默认返航模式被激活(RTL HOME activated),四旋翼起飞、悬停5s后将自动返航降落!
- 运行 QGroundControl
- 在terminal中执行
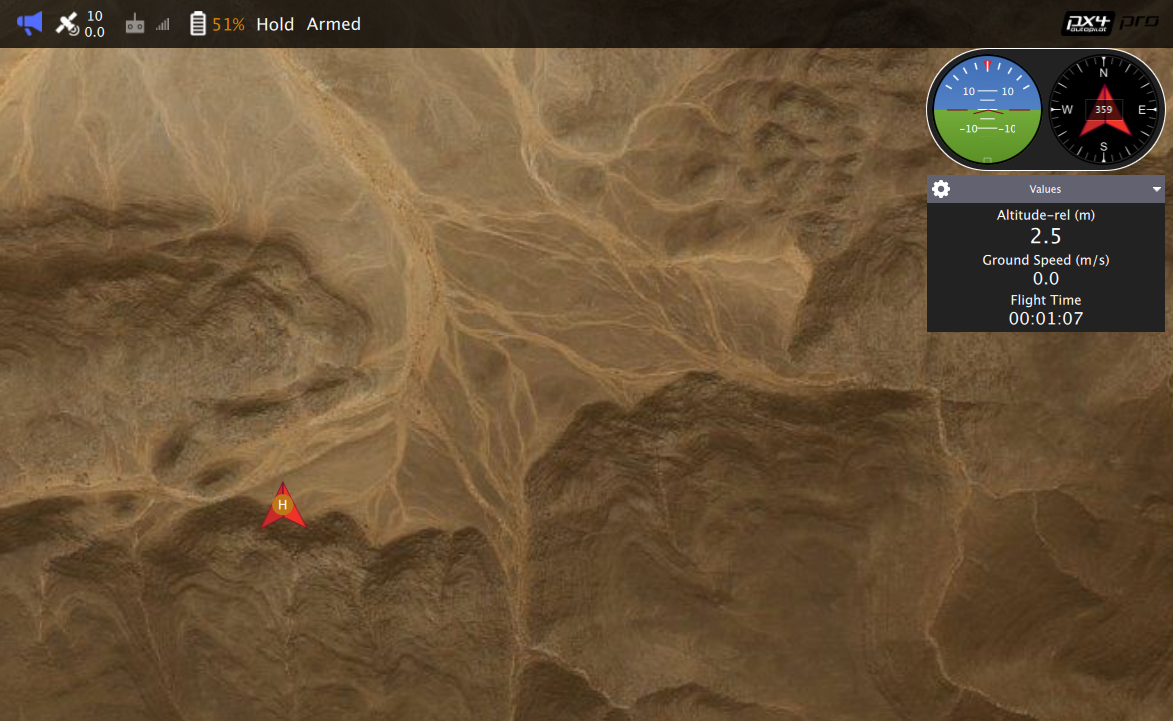
>>commander takeoff即可实现JMAVSim与QGroundControl联合,在QGroundControl也可看到四旋翼参数(如,悬停高度为2.5m)。
![]()
- 在 QGroundControl-Plan 中进行路径规划
- 在 QGroundControl-Plan-Sync中保存为‘temp2’,而后单击上载‘Upload’
![]()
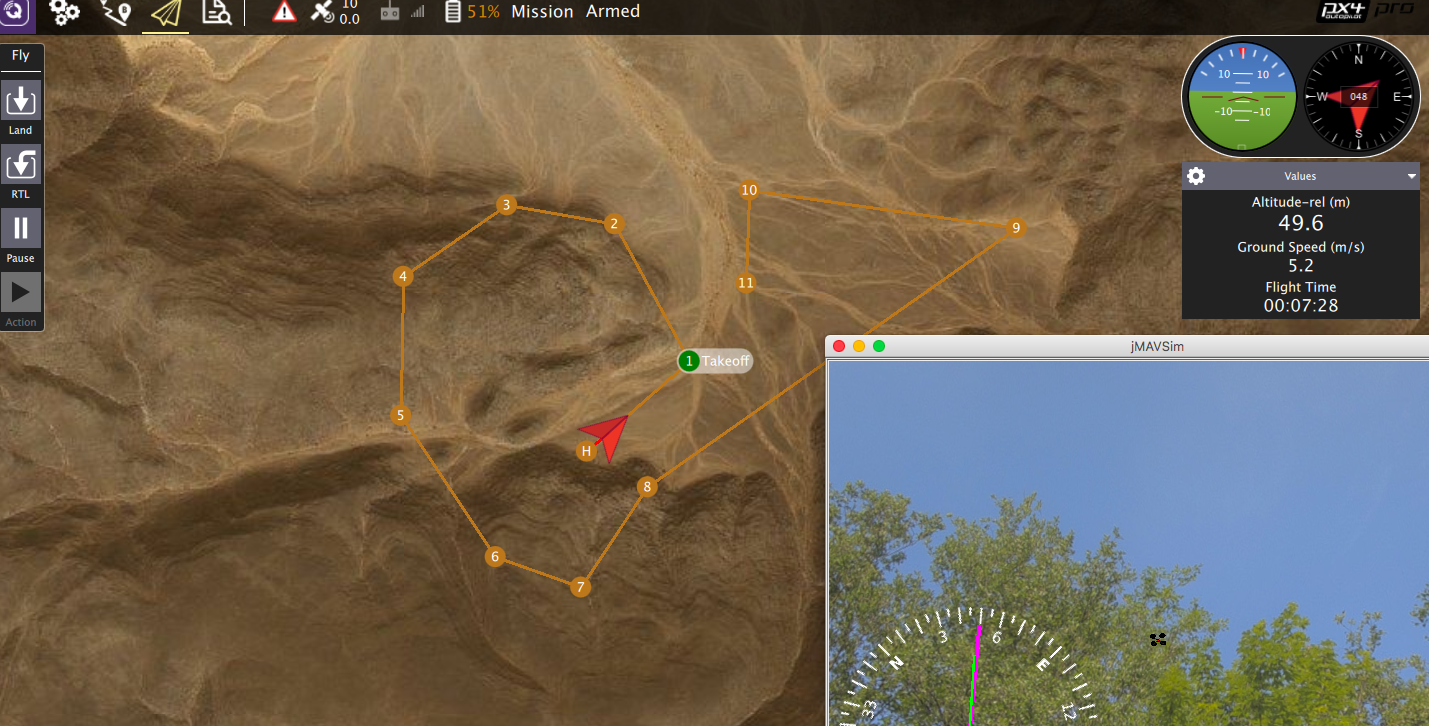
- 在 QGroundControl-Fly中‘Continue Mission’,即可在JMAVSim与QGroundControl中分别观察四旋翼的飞行状态。
![]()
- 在 QGroundControl-Fly中可控制四旋翼降落(单击Land)、返航(单击RTL)。单击完成后,须进行滑动确认!
- 在terminal中可执行“commander land:命令四旋翼着陆”、“shutdown:命令退出app”


 浙公网安备 33010602011771号
浙公网安备 33010602011771号