何为BVH?
总结一下最近学习BVH的知识。
BVH全称:Bounding volume hierarchy。这是一种用来管理3D场景中物体的方法。
我主要是在光线追踪算法中用这个方法来做加速,因为光线追踪算法的计算要求非常高,稍微好点的画质,至少要求每像素达到上千的采样数量。简单介绍下光线追踪算法:从相机发射射线到场景中与场景中物体进行相交检测,如果碰撞检测成功,则根据物体的材质计算颜色,然后计算反射或者折射光线的方向,继续跟踪这条新的光线,直到达到最大递归深度或者没有碰到任何物体。如果不采用BVH,那么每一条射线都需要和场景中的所有物体:球体、三角形等复杂物体进行相交检测,而这个检测时间是非常昂贵的,因为要计算直线和球体的相交,直线和三角形的相交等,这些计算都比较复杂,尤其是三角形这块。相交检测的时间是目前光线追踪算法从理论到大规模实际应用过渡的主要瓶颈。使用BVH呢,简单的来说就是通过一个简单的包围盒把物体包围起来,射线和场景中的物体求交之前,会先和这个包围盒进行求交,如果该射线没有碰到该包围盒,表明该直线一定不会和包围盒里的物体相交;如果该射线碰到该包围盒,那么再来计算射线是否和包围盒中的物体相交。
最常用的一个bounding volumes 是 axis-aligned minimum bounding box,也就是通常说的AABB方法,就是用沿着坐标轴方向的能够刚好把物体包围起来的盒子(最小的盒子)来做bounding volumes。
而场景中有很多物体,采用BVH其实是用二叉树的结构来管理场景。如下图:
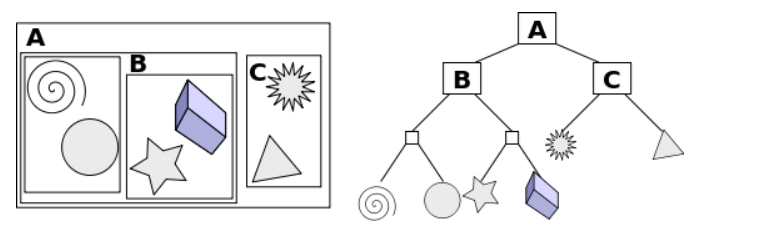
每一条射线来和场景中的所有物体检测是否相交的时候,其实就是在遍历这棵二叉树。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号