
ceph-csi源码分析(6)-rbd driver-nodeserver分析(下)
更多 ceph-csi 其他源码分析,请查看下面这篇博文:kubernetes ceph-csi分析目录导航
ceph-csi源码分析(6)-rbd driver-nodeserver分析(下)
当ceph-csi组件启动时指定的driver type为rbd时,会启动rbd driver相关的服务。然后再根据controllerserver、nodeserver的参数配置,决定启动ControllerServer与IdentityServer,或NodeServer与IdentityServer。
基于tag v3.0.0
https://github.com/ceph/ceph-csi/releases/tag/v3.0.0
rbd driver分析将分为4个部分,分别是服务入口分析、controllerserver分析、nodeserver分析与IdentityServer分析。
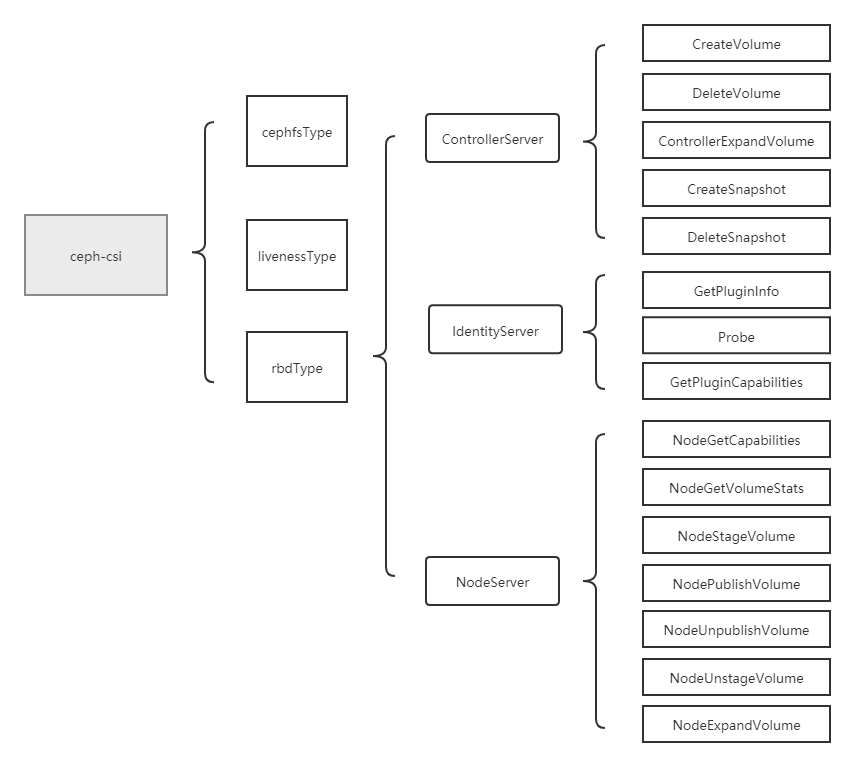
nodeserver主要包括了NodeGetCapabilities(获取driver能力)、NodeGetVolumeStats(存储探测及metrics获取)、NodeStageVolume(map rbd与mount stagingPath)、NodePublishVolume(mount targetPath)、NodeUnpublishVolume(umount targetPath)、NodeUnstageVolume(umount stagingPath与unmap rbd)、NodeExpandVolume(node端存储扩容)操作,将一一进行分析。这节进行NodeStageVolume、NodePublishVolume、NodeUnpublishVolume、NodeUnstageVolume的分析。
nodeserver分析(下)
ceph rbd挂载知识讲解
rbd image map成块设备,主要有两种方式:(1)通过RBD Kernel Module,(2)通过RBD-NBD。参考:https://www.jianshu.com/p/bb9d14bd897c 、http://xiaqunfeng.cc/2017/06/07/Map-RBD-Devices-on-NBD/
一个ceph rbd image挂载给pod,一共分为2个步骤,分别如下:
1.kubelet组件调用rbdType-nodeserver-ceph-csi的NodeStageVolume方法,将rbd image map到node上的rbd/nbd device,然后将rbd device格式化并mount到staging path;
2.kubelet组件调用rbdType-nodeserver-ceph-csi的NodePublishVolume方法,将上一步骤中的staging path mount到target path。
ceph rbd解除挂载知识讲解
一个ceph rbd image从pod中解除挂载,一共分为2个步骤,分别如下:
1.kubelet组件调用rbdType-nodeserver-ceph-csi的NodeUnpublishVolume方法,解除掉stagingPath与targetPath的挂载关系。
2.kubelet组件调用rbdType-nodeserver-ceph-csi的NodeUnstageVolume方法,先解除掉targetPath与rbd/nbd device的挂载关系,然后再unmap掉rbd/nbd device(即解除掉node端rbd/nbd device与ceph rbd image的挂载)。
rbd image挂载给pod后,node上会出现2个mount关系,示例如下:
# mount | grep nbd
/dev/nbd0 on /home/cld/kubernetes/lib/kubelet/plugins/kubernetes.io/csi/pv/pvc-e2104b0f-774e-420e-a388-1705344084a4/globalmount/0001-0024-0bba3be9-0a1c-41db-a619-26ffea20161e-0000000000000004-40b130e1-a630-11eb-8bea-246e968ec20c type xfs (rw,relatime,nouuid,attr2,inode64,noquota,_netdev)
/dev/nbd0 on /home/cld/kubernetes/lib/kubelet/pods/80114f88-2b09-440c-aec2-54c16efe6923/volumes/kubernetes.io~csi/pvc-e2104b0f-774e-420e-a388-1705344084a4/mount type xfs (rw,relatime,nouuid,attr2,inode64,noquota,_netdev)
其中/home/cld/kubernetes/lib/kubelet/plugins/kubernetes.io/csi/pv/pvc-e2104b0f-774e-420e-a388-1705344084a4/globalmount/0001-0024-0bba3be9-0a1c-41db-a619-26ffea20161e-0000000000000004-40b130e1-a630-11eb-8bea-246e968ec20c为staging path;而/home/cld/kubernetes/lib/kubelet/pods/80114f88-2b09-440c-aec2-54c16efe6923/volumes/kubernetes.io~csi/pvc-e2104b0f-774e-420e-a388-1705344084a4/mount为target path,/dev/nbd0为nbd device。
注意
一个rbd image挂载给一个node上的多个pod时,NodeStageVolume方法只会被调用一次,NodePublishVolume会被调用多次,即出现该情况时,staging path只有一个,而target path会有多个。你可以这样理解,staging path对应的是rbd image,而target path对应的是pod,所以当一个rbd image挂载给一个node上的多个pod时,staging path只有一个,而target path会有多个。
解除挂载也同理,当挂载了某个rbd image的所有pod都被删除,NodeUnstageVolume方法才会被调用。
(4)NodeStageVolume
简介
将rbd image map到node上的rbd/nbd device,并格式化后挂载到staging path。
NodeStageVolume mounts the volume to a staging path on the node.
- Stash image metadata under staging path
- Map the image (creates a device)
- Create the staging file/directory under staging path
- Stage the device (mount the device mapped for image)
主要步骤:
(1)将rbd image map到node上的rbd/nbd device;
(2)将rbd device格式化(volumeMode为block时,不用格式化),并mount到staging path。
NodeStageVolume
NodeStageVolume主体流程:
(1)校验请求参数、校验AccessMode;
(2)从请求参数中获取volID;
(3)根据secret构建ceph请求凭证(secret由kubelet传入);
(4)检查stagingPath是否存在,是否已经mount;
(5)根据volID从volume journal中获取image name;
(6)在stagingParentPath下创建image-meta.json,用于存储image的元数据;
(7)调用ns.stageTransaction做map与mount操作。
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) NodeStageVolume(ctx context.Context, req *csi.NodeStageVolumeRequest) (*csi.NodeStageVolumeResponse, error) {
// (1)校验请求参数
if err := util.ValidateNodeStageVolumeRequest(req); err != nil {
return nil, err
}
// 校验AccessMode
isBlock := req.GetVolumeCapability().GetBlock() != nil
disableInUseChecks := false
// MULTI_NODE_MULTI_WRITER is supported by default for Block access type volumes
if req.VolumeCapability.AccessMode.Mode == csi.VolumeCapability_AccessMode_MULTI_NODE_MULTI_WRITER {
if !isBlock {
klog.Warningf(util.Log(ctx, "MULTI_NODE_MULTI_WRITER currently only supported with volumes of access type `block`, invalid AccessMode for volume: %v"), req.GetVolumeId())
return nil, status.Error(codes.InvalidArgument, "rbd: RWX access mode request is only valid for volumes with access type `block`")
}
disableInUseChecks = true
}
// (2)从请求参数中获取volID
volID := req.GetVolumeId()
// (3)根据secret构建ceph请求凭证
cr, err := util.NewUserCredentials(req.GetSecrets())
if err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
defer cr.DeleteCredentials()
if acquired := ns.VolumeLocks.TryAcquire(volID); !acquired {
klog.Errorf(util.Log(ctx, util.VolumeOperationAlreadyExistsFmt), volID)
return nil, status.Errorf(codes.Aborted, util.VolumeOperationAlreadyExistsFmt, volID)
}
defer ns.VolumeLocks.Release(volID)
stagingParentPath := req.GetStagingTargetPath()
stagingTargetPath := stagingParentPath + "/" + volID
// check is it a static volume
staticVol := false
val, ok := req.GetVolumeContext()["staticVolume"]
if ok {
if staticVol, err = strconv.ParseBool(val); err != nil {
return nil, status.Error(codes.InvalidArgument, err.Error())
}
}
// (4)检查stagingPath是否存在,是否已经mount
var isNotMnt bool
// check if stagingPath is already mounted
isNotMnt, err = mount.IsNotMountPoint(ns.mounter, stagingTargetPath)
if err != nil && !os.IsNotExist(err) {
return nil, status.Error(codes.Internal, err.Error())
}
if !isNotMnt {
util.DebugLog(ctx, "rbd: volume %s is already mounted to %s, skipping", volID, stagingTargetPath)
return &csi.NodeStageVolumeResponse{}, nil
}
volOptions, err := genVolFromVolumeOptions(ctx, req.GetVolumeContext(), req.GetSecrets(), disableInUseChecks)
if err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
// (5)根据volID从volume journal中获取image name
// get rbd image name from the volume journal
// for static volumes, the image name is actually the volume ID itself
switch {
case staticVol:
volOptions.RbdImageName = volID
default:
var vi util.CSIIdentifier
var imageAttributes *journal.ImageAttributes
err = vi.DecomposeCSIID(volID)
if err != nil {
err = fmt.Errorf("error decoding volume ID (%s) (%s)", err, volID)
return nil, status.Error(codes.Internal, err.Error())
}
j, err2 := volJournal.Connect(volOptions.Monitors, cr)
if err2 != nil {
klog.Errorf(
util.Log(ctx, "failed to establish cluster connection: %v"),
err2)
return nil, status.Error(codes.Internal, err.Error())
}
defer j.Destroy()
imageAttributes, err = j.GetImageAttributes(
ctx, volOptions.Pool, vi.ObjectUUID, false)
if err != nil {
err = fmt.Errorf("error fetching image attributes for volume ID (%s) (%s)", err, volID)
return nil, status.Error(codes.Internal, err.Error())
}
volOptions.RbdImageName = imageAttributes.ImageName
}
volOptions.VolID = volID
transaction := stageTransaction{}
// (6)在stagingParentPath下创建image-meta.json,用于存储image的元数据
// Stash image details prior to mapping the image (useful during Unstage as it has no
// voloptions passed to the RPC as per the CSI spec)
err = stashRBDImageMetadata(volOptions, stagingParentPath)
if err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
defer func() {
if err != nil {
ns.undoStagingTransaction(ctx, req, transaction)
}
}()
// (7)调用ns.stageTransaction做map/mount操作
// perform the actual staging and if this fails, have undoStagingTransaction
// cleans up for us
transaction, err = ns.stageTransaction(ctx, req, volOptions, staticVol)
if err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
util.DebugLog(ctx, "rbd: successfully mounted volume %s to stagingTargetPath %s", req.GetVolumeId(), stagingTargetPath)
return &csi.NodeStageVolumeResponse{}, nil
}
1.ValidateNodeStageVolumeRequest
ValidateNodeStageVolumeRequest校验了如下内容:
(1)volume capability参数不能为空;
(2)volume ID参数不能为空;
(3)staging target path(临时目录)参数不能为空;
(4)stage secrets参数不能为空;
(5)staging path(临时目录)是否存在于dnode上。
//ceph-csi/internal/util/validate.go
func ValidateNodeStageVolumeRequest(req *csi.NodeStageVolumeRequest) error {
if req.GetVolumeCapability() == nil {
return status.Error(codes.InvalidArgument, "volume capability missing in request")
}
if req.GetVolumeId() == "" {
return status.Error(codes.InvalidArgument, "volume ID missing in request")
}
if req.GetStagingTargetPath() == "" {
return status.Error(codes.InvalidArgument, "staging target path missing in request")
}
if req.GetSecrets() == nil || len(req.GetSecrets()) == 0 {
return status.Error(codes.InvalidArgument, "stage secrets cannot be nil or empty")
}
// validate stagingpath exists
ok := checkDirExists(req.GetStagingTargetPath())
if !ok {
return status.Error(codes.InvalidArgument, "staging path does not exists on node")
}
return nil
}
2.stashRBDImageMetadata
stashRBDImageMetadata在stagingParentPath下创建image-meta.json,用于存储image的元数据。
//ceph-csi/internal/rbd/rbd_util.go
const stashFileName = "image-meta.json"
func stashRBDImageMetadata(volOptions *rbdVolume, path string) error {
var imgMeta = rbdImageMetadataStash{
// there are no checks for this at present
Version: 2, // nolint:gomnd // number specifies version.
Pool: volOptions.Pool,
ImageName: volOptions.RbdImageName,
Encrypted: volOptions.Encrypted,
}
imgMeta.NbdAccess = false
if volOptions.Mounter == rbdTonbd && hasNBD {
imgMeta.NbdAccess = true
}
encodedBytes, err := json.Marshal(imgMeta)
if err != nil {
return fmt.Errorf("failed to marshall JSON image metadata for image (%s): (%v)", volOptions, err)
}
fPath := filepath.Join(path, stashFileName)
err = ioutil.WriteFile(fPath, encodedBytes, 0600)
if err != nil {
return fmt.Errorf("failed to stash JSON image metadata for image (%s) at path (%s): (%v)", volOptions, fPath, err)
}
return nil
}
root@cld-dnode3-1091:/home/zhongjialiang# ls /home/cld/kubernetes/lib/kubelet/plugins/kubernetes.io/csi/pv/pvc-14ee5002-9d60-4ba3-a1d2-cc3800ee0893/globalmount/
image-meta.json 0001-0024-0bba3be9-0a1c-41db-a619-26ffea20161e-0000000000000004-1699e662-e83f-11ea-8e79-246e96907f74/
3.ns.stageTransaction
主要流程:
(1)调用attachRBDImage将rbd device map到dnode;
(2)调用ns.mountVolumeToStagePath将dnode上的rbd device格式化后 mount到StagePath。
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) stageTransaction(ctx context.Context, req *csi.NodeStageVolumeRequest, volOptions *rbdVolume, staticVol bool) (stageTransaction, error) {
transaction := stageTransaction{}
var err error
var readOnly bool
var feature bool
var cr *util.Credentials
cr, err = util.NewUserCredentials(req.GetSecrets())
if err != nil {
return transaction, err
}
defer cr.DeleteCredentials()
err = volOptions.Connect(cr)
if err != nil {
klog.Errorf(util.Log(ctx, "failed to connect to volume %v: %v"), volOptions.RbdImageName, err)
return transaction, err
}
defer volOptions.Destroy()
// Allow image to be mounted on multiple nodes if it is ROX
if req.VolumeCapability.AccessMode.Mode == csi.VolumeCapability_AccessMode_MULTI_NODE_READER_ONLY {
util.ExtendedLog(ctx, "setting disableInUseChecks on rbd volume to: %v", req.GetVolumeId)
volOptions.DisableInUseChecks = true
volOptions.readOnly = true
}
if kernelRelease == "" {
// fetch the current running kernel info
kernelRelease, err = util.GetKernelVersion()
if err != nil {
return transaction, err
}
}
if !util.CheckKernelSupport(kernelRelease, deepFlattenSupport) {
if !skipForceFlatten {
feature, err = volOptions.checkImageChainHasFeature(ctx, librbd.FeatureDeepFlatten)
if err != nil {
return transaction, err
}
if feature {
err = volOptions.flattenRbdImage(ctx, cr, true, rbdHardMaxCloneDepth, rbdSoftMaxCloneDepth)
if err != nil {
return transaction, err
}
}
}
}
// Mapping RBD image
var devicePath string
devicePath, err = attachRBDImage(ctx, volOptions, cr)
if err != nil {
return transaction, err
}
transaction.devicePath = devicePath
util.DebugLog(ctx, "rbd image: %s/%s was successfully mapped at %s\n",
req.GetVolumeId(), volOptions.Pool, devicePath)
if volOptions.Encrypted {
devicePath, err = ns.processEncryptedDevice(ctx, volOptions, devicePath)
if err != nil {
return transaction, err
}
transaction.isEncrypted = true
}
stagingTargetPath := getStagingTargetPath(req)
isBlock := req.GetVolumeCapability().GetBlock() != nil
err = ns.createStageMountPoint(ctx, stagingTargetPath, isBlock)
if err != nil {
return transaction, err
}
transaction.isStagePathCreated = true
// nodeStage Path
readOnly, err = ns.mountVolumeToStagePath(ctx, req, staticVol, stagingTargetPath, devicePath)
if err != nil {
return transaction, err
}
transaction.isMounted = true
if !readOnly {
// #nosec - allow anyone to write inside the target path
err = os.Chmod(stagingTargetPath, 0777)
}
return transaction, err
}
3.1 attachRBDImage
attachRBDImage主要流程:
(1)调用waitForPath判断image是否已经map到该node上;
(2)没有map到该node上时,调用waitForrbdImage判断image是否存在,是否已被使用;
(3)调用createPath将image map到node上。
//ceph-csi/internal/rbd/rbd_attach.go
func attachRBDImage(ctx context.Context, volOptions *rbdVolume, cr *util.Credentials) (string, error) {
var err error
image := volOptions.RbdImageName
useNBD := false
if volOptions.Mounter == rbdTonbd && hasNBD {
useNBD = true
}
devicePath, found := waitForPath(ctx, volOptions.Pool, image, 1, useNBD)
if !found {
backoff := wait.Backoff{
Duration: rbdImageWatcherInitDelay,
Factor: rbdImageWatcherFactor,
Steps: rbdImageWatcherSteps,
}
err = waitForrbdImage(ctx, backoff, volOptions)
if err != nil {
return "", err
}
devicePath, err = createPath(ctx, volOptions, cr)
}
return devicePath, err
}
createPath拼接ceph命令,然后执行map命令,将rbd image map到dnode上成为rbd device。
rbd-nbd挂载模式,通过--device-type=nbd指定。
func createPath(ctx context.Context, volOpt *rbdVolume, cr *util.Credentials) (string, error) {
isNbd := false
imagePath := volOpt.String()
util.TraceLog(ctx, "rbd: map mon %s", volOpt.Monitors)
// Map options
mapOptions := []string{
"--id", cr.ID,
"-m", volOpt.Monitors,
"--keyfile=" + cr.KeyFile,
"map", imagePath,
}
// Choose access protocol
accessType := accessTypeKRbd
if volOpt.Mounter == rbdTonbd && hasNBD {
isNbd = true
accessType = accessTypeNbd
}
// Update options with device type selection
mapOptions = append(mapOptions, "--device-type", accessType)
if volOpt.readOnly {
mapOptions = append(mapOptions, "--read-only")
}
// Execute map
stdout, stderr, err := util.ExecCommand(ctx, rbd, mapOptions...)
if err != nil {
klog.Warningf(util.Log(ctx, "rbd: map error %v, rbd output: %s"), err, stderr)
// unmap rbd image if connection timeout
if strings.Contains(err.Error(), rbdMapConnectionTimeout) {
detErr := detachRBDImageOrDeviceSpec(ctx, imagePath, true, isNbd, volOpt.Encrypted, volOpt.VolID)
if detErr != nil {
klog.Warningf(util.Log(ctx, "rbd: %s unmap error %v"), imagePath, detErr)
}
}
return "", fmt.Errorf("rbd: map failed with error %v, rbd error output: %s", err, stderr)
}
devicePath := strings.TrimSuffix(stdout, "\n")
return devicePath, nil
}
3.2 mountVolumeToStagePath
主体流程:
(1)当volumeMode为Filesystem时,运行mkfs格式化rbd device;
(2)将rbd device挂载到stagingPath。
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) mountVolumeToStagePath(ctx context.Context, req *csi.NodeStageVolumeRequest, staticVol bool, stagingPath, devicePath string) (bool, error) {
readOnly := false
fsType := req.GetVolumeCapability().GetMount().GetFsType()
diskMounter := &mount.SafeFormatAndMount{Interface: ns.mounter, Exec: utilexec.New()}
// rbd images are thin-provisioned and return zeros for unwritten areas. A freshly created
// image will not benefit from discard and we also want to avoid as much unnecessary zeroing
// as possible. Open-code mkfs here because FormatAndMount() doesn't accept custom mkfs
// options.
//
// Note that "freshly" is very important here. While discard is more of a nice to have,
// lazy_journal_init=1 is plain unsafe if the image has been written to before and hasn't
// been zeroed afterwards (unlike the name suggests, it leaves the journal completely
// uninitialized and carries a risk until the journal is overwritten and wraps around for
// the first time).
existingFormat, err := diskMounter.GetDiskFormat(devicePath)
if err != nil {
klog.Errorf(util.Log(ctx, "failed to get disk format for path %s, error: %v"), devicePath, err)
return readOnly, err
}
opt := []string{"_netdev"}
opt = csicommon.ConstructMountOptions(opt, req.GetVolumeCapability())
isBlock := req.GetVolumeCapability().GetBlock() != nil
rOnly := "ro"
if req.VolumeCapability.AccessMode.Mode == csi.VolumeCapability_AccessMode_MULTI_NODE_READER_ONLY ||
req.VolumeCapability.AccessMode.Mode == csi.VolumeCapability_AccessMode_SINGLE_NODE_READER_ONLY {
if !csicommon.MountOptionContains(opt, rOnly) {
opt = append(opt, rOnly)
}
}
if csicommon.MountOptionContains(opt, rOnly) {
readOnly = true
}
if fsType == "xfs" {
opt = append(opt, "nouuid")
}
if existingFormat == "" && !staticVol && !readOnly {
args := []string{}
if fsType == "ext4" {
args = []string{"-m0", "-Enodiscard,lazy_itable_init=1,lazy_journal_init=1", devicePath}
} else if fsType == "xfs" {
args = []string{"-K", devicePath}
// always disable reflink
// TODO: make enabling an option, see ceph/ceph-csi#1256
if ns.xfsSupportsReflink() {
args = append(args, "-m", "reflink=0")
}
}
if len(args) > 0 {
cmdOut, cmdErr := diskMounter.Exec.Command("mkfs."+fsType, args...).CombinedOutput()
if cmdErr != nil {
klog.Errorf(util.Log(ctx, "failed to run mkfs error: %v, output: %v"), cmdErr, string(cmdOut))
return readOnly, cmdErr
}
}
}
if isBlock {
opt = append(opt, "bind")
err = diskMounter.Mount(devicePath, stagingPath, fsType, opt)
} else {
err = diskMounter.FormatAndMount(devicePath, stagingPath, fsType, opt)
}
if err != nil {
klog.Errorf(util.Log(ctx,
"failed to mount device path (%s) to staging path (%s) for volume "+
"(%s) error: %s Check dmesg logs if required."),
devicePath,
stagingPath,
req.GetVolumeId(),
err)
}
return readOnly, err
}
(5)NodePublishVolume
简介
将NodeStageVolume方法中的staging path,mount到target path。
NodeStageVolume将rbd image map到dnode上成为device后,随即将device mount到了一个staging path。
NodePublishVolume将stagingPath mount到target path。
stagingPath示例:
/home/cld/kubernetes/lib/kubelet/plugins/kubernetes.io/csi/pv/pvc-14ee5002-9d60-4ba3-a1d2-cc3800ee0893/globalmount/0001-0024-0bba3be9-0a1c-41db-a619-26ffea20161e-0000000000000004-1699e662-e83f-11ea-8e79-246e96907f74
targetPath示例:
/home/cld/kubernetes/lib/kubelet/pods/c14de522-0679-44b6-af8b-e1ba08b5b004/volumes/kubernetes.io~csi/pvc-14ee5002-9d60-4ba3-a1d2-cc3800ee0893/mount
NodePublishVolume
主体流程:
(1)校验请求参数;
(2)检查target path是否存在,不存在则创建;
(3)将staging path挂载到target path。
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) NodePublishVolume(ctx context.Context, req *csi.NodePublishVolumeRequest) (*csi.NodePublishVolumeResponse, error) {
err := util.ValidateNodePublishVolumeRequest(req)
if err != nil {
return nil, err
}
targetPath := req.GetTargetPath()
isBlock := req.GetVolumeCapability().GetBlock() != nil
stagingPath := req.GetStagingTargetPath()
volID := req.GetVolumeId()
stagingPath += "/" + volID
if acquired := ns.VolumeLocks.TryAcquire(volID); !acquired {
klog.Errorf(util.Log(ctx, util.VolumeOperationAlreadyExistsFmt), volID)
return nil, status.Errorf(codes.Aborted, util.VolumeOperationAlreadyExistsFmt, volID)
}
defer ns.VolumeLocks.Release(volID)
// Check if that target path exists properly
notMnt, err := ns.createTargetMountPath(ctx, targetPath, isBlock)
if err != nil {
return nil, err
}
if !notMnt {
return &csi.NodePublishVolumeResponse{}, nil
}
// Publish Path
err = ns.mountVolume(ctx, stagingPath, req)
if err != nil {
return nil, err
}
util.DebugLog(ctx, "rbd: successfully mounted stagingPath %s to targetPath %s", stagingPath, targetPath)
return &csi.NodePublishVolumeResponse{}, nil
}
1.ValidateNodePublishVolumeRequest
ValidateNodePublishVolumeRequest主要是校验部分请求参数,校验volume capability/volume ID/target path/staging target path不能为空。
//ceph-csi/internal/util/validate.go
func ValidateNodePublishVolumeRequest(req *csi.NodePublishVolumeRequest) error {
if req.GetVolumeCapability() == nil {
return status.Error(codes.InvalidArgument, "volume capability missing in request")
}
if req.GetVolumeId() == "" {
return status.Error(codes.InvalidArgument, "volume ID missing in request")
}
if req.GetTargetPath() == "" {
return status.Error(codes.InvalidArgument, "target path missing in request")
}
if req.GetStagingTargetPath() == "" {
return status.Error(codes.InvalidArgument, "staging target path missing in request")
}
return nil
}
2.createTargetMountPath
createTargetMountPath主要是检查mount path是否存在,不存在则创建
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) createTargetMountPath(ctx context.Context, mountPath string, isBlock bool) (bool, error) {
// Check if that mount path exists properly
notMnt, err := mount.IsNotMountPoint(ns.mounter, mountPath)
if err != nil {
if os.IsNotExist(err) {
if isBlock {
// #nosec
pathFile, e := os.OpenFile(mountPath, os.O_CREATE|os.O_RDWR, 0750)
if e != nil {
util.DebugLog(ctx, "Failed to create mountPath:%s with error: %v", mountPath, err)
return notMnt, status.Error(codes.Internal, e.Error())
}
if err = pathFile.Close(); err != nil {
util.DebugLog(ctx, "Failed to close mountPath:%s with error: %v", mountPath, err)
return notMnt, status.Error(codes.Internal, err.Error())
}
} else {
// Create a directory
if err = util.CreateMountPoint(mountPath); err != nil {
return notMnt, status.Error(codes.Internal, err.Error())
}
}
notMnt = true
} else {
return false, status.Error(codes.Internal, err.Error())
}
}
return notMnt, err
}
3.mountVolume
mountVolume主要是拼凑mount命令,将staging path挂载到target path
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) mountVolume(ctx context.Context, stagingPath string, req *csi.NodePublishVolumeRequest) error {
// Publish Path
fsType := req.GetVolumeCapability().GetMount().GetFsType()
readOnly := req.GetReadonly()
mountOptions := []string{"bind", "_netdev"}
isBlock := req.GetVolumeCapability().GetBlock() != nil
targetPath := req.GetTargetPath()
mountOptions = csicommon.ConstructMountOptions(mountOptions, req.GetVolumeCapability())
util.DebugLog(ctx, "target %v\nisBlock %v\nfstype %v\nstagingPath %v\nreadonly %v\nmountflags %v\n",
targetPath, isBlock, fsType, stagingPath, readOnly, mountOptions)
if readOnly {
mountOptions = append(mountOptions, "ro")
}
if err := util.Mount(stagingPath, targetPath, fsType, mountOptions); err != nil {
return status.Error(codes.Internal, err.Error())
}
return nil
}
(6)NodeUnpublishVolume
简介
解除掉stagingPath到targetPath的挂载。
NodeUnpublishVolume unmounts the volume from the target path.
NodeUnpublishVolume
主体流程:
(1)校验请求参数;
(2)判断指定路径是否为挂载点;
(3)解除掉stagingPath到targetPath的挂载;
(4)删除targetPath目录及其包含的任何子目录。
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) NodeUnpublishVolume(ctx context.Context, req *csi.NodeUnpublishVolumeRequest) (*csi.NodeUnpublishVolumeResponse, error) {
// (1)校验请求参数;
err := util.ValidateNodeUnpublishVolumeRequest(req)
if err != nil {
return nil, err
}
targetPath := req.GetTargetPath()
volID := req.GetVolumeId()
if acquired := ns.VolumeLocks.TryAcquire(volID); !acquired {
klog.Errorf(util.Log(ctx, util.VolumeOperationAlreadyExistsFmt), volID)
return nil, status.Errorf(codes.Aborted, util.VolumeOperationAlreadyExistsFmt, volID)
}
defer ns.VolumeLocks.Release(volID)
// (2)判断指定路径是否为mountpoint
notMnt, err := mount.IsNotMountPoint(ns.mounter, targetPath)
if err != nil {
if os.IsNotExist(err) {
// targetPath has already been deleted
util.DebugLog(ctx, "targetPath: %s has already been deleted", targetPath)
return &csi.NodeUnpublishVolumeResponse{}, nil
}
return nil, status.Error(codes.NotFound, err.Error())
}
if notMnt {
if err = os.RemoveAll(targetPath); err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
return &csi.NodeUnpublishVolumeResponse{}, nil
}
// (3)unmount targetPath;
if err = ns.mounter.Unmount(targetPath); err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
// (4)删除targetPath目录及其包含的任何子目录。
if err = os.RemoveAll(targetPath); err != nil {
return nil, status.Error(codes.Internal, err.Error())
}
util.DebugLog(ctx, "rbd: successfully unbound volume %s from %s", req.GetVolumeId(), targetPath)
return &csi.NodeUnpublishVolumeResponse{}, nil
}
RemoveAll
删除targetPath目录及其包含的任何子目录。
//GO/src/os/path.go
// RemoveAll removes path and any children it contains.
// It removes everything it can but returns the first error
// it encounters. If the path does not exist, RemoveAll
// returns nil (no error).
// If there is an error, it will be of type *PathError.
func RemoveAll(path string) error {
return removeAll(path)
}
(7)NodeUnstageVolume
简介
先解除掉targetPath到rbd/nbd device的挂载,然后再unmap掉rbd/nbd device(即解除掉node端rbd/nbd device与ceph rbd image的挂载)。
NodeUnstageVolume unstages the volume from the staging path.
NodeUnstageVolume
主体流程:
(1)校验请求参数;
(2)判断stagingTargetPath是否存在;
(3)将stagingTargetPath unmount rbd device;
(4)删除stagingTargetPath;
(5)从stagingParentPath的image-meta.json文件中读取image的元数据;
(6)unmap rbd device;
(7)删除该image对应的元数据,即image-meta.json文件。
//ceph-csi/internal/rbd/nodeserver.go
func (ns *NodeServer) NodeUnstageVolume(ctx context.Context, req *csi.NodeUnstageVolumeRequest) (*csi.NodeUnstageVolumeResponse, error) {
// (1)校验请求参数;
var err error
if err = util.ValidateNodeUnstageVolumeRequest(req); err != nil {
return nil, err
}
volID := req.GetVolumeId()
if acquired := ns.VolumeLocks.TryAcquire(volID); !acquired {
klog.Errorf(util.Log(ctx, util.VolumeOperationAlreadyExistsFmt), volID)
return nil, status.Errorf(codes.Aborted, util.VolumeOperationAlreadyExistsFmt, volID)
}
defer ns.VolumeLocks.Release(volID)
stagingParentPath := req.GetStagingTargetPath()
stagingTargetPath := getStagingTargetPath(req)
// (2)判断stagingTargetPath是否存在;
notMnt, err := mount.IsNotMountPoint(ns.mounter, stagingTargetPath)
if err != nil {
if !os.IsNotExist(err) {
return nil, status.Error(codes.NotFound, err.Error())
}
// Continue on ENOENT errors as we may still have the image mapped
notMnt = true
}
if !notMnt {
// (3)将stagingTargetPath unmount rbd device;
// Unmounting the image
err = ns.mounter.Unmount(stagingTargetPath)
if err != nil {
util.ExtendedLog(ctx, "failed to unmount targetPath: %s with error: %v", stagingTargetPath, err)
return nil, status.Error(codes.Internal, err.Error())
}
}
// (4)删除stagingTargetPath;
// 示例:/home/cld/kubernetes/lib/kubelet/plugins/kubernetes.io/csi/pv/pvc-14ee5002-9d60-4ba3-a1d2-cc3800ee0893/globalmount/0001-0024-0bba3be9-0a1c-41db-a619-26ffea20161e-0000000000000004-1699e662-e83f-11ea-8e79-246e96907f74
if err = os.Remove(stagingTargetPath); err != nil {
// Any error is critical as Staging path is expected to be empty by Kubernetes, it otherwise
// keeps invoking Unstage. Hence any errors removing files within this path is a critical
// error
if !os.IsNotExist(err) {
klog.Errorf(util.Log(ctx, "failed to remove staging target path (%s): (%v)"), stagingTargetPath, err)
return nil, status.Error(codes.Internal, err.Error())
}
}
// (5)从stagingParentPath的image-meta.json文件中读取image的元数据;
imgInfo, err := lookupRBDImageMetadataStash(stagingParentPath)
if err != nil {
util.UsefulLog(ctx, "failed to find image metadata: %v", err)
// It is an error if it was mounted, as we should have found the image metadata file with
// no errors
if !notMnt {
return nil, status.Error(codes.Internal, err.Error())
}
// If not mounted, and error is anything other than metadata file missing, it is an error
if !errors.Is(err, ErrMissingStash) {
return nil, status.Error(codes.Internal, err.Error())
}
// It was not mounted and image metadata is also missing, we are done as the last step in
// in the staging transaction is complete
return &csi.NodeUnstageVolumeResponse{}, nil
}
// (6)unmap rbd device;
// Unmapping rbd device
imageSpec := imgInfo.String()
if err = detachRBDImageOrDeviceSpec(ctx, imageSpec, true, imgInfo.NbdAccess, imgInfo.Encrypted, req.GetVolumeId()); err != nil {
klog.Errorf(util.Log(ctx, "error unmapping volume (%s) from staging path (%s): (%v)"), req.GetVolumeId(), stagingTargetPath, err)
return nil, status.Error(codes.Internal, err.Error())
}
util.DebugLog(ctx, "successfully unmounted volume (%s) from staging path (%s)",
req.GetVolumeId(), stagingTargetPath)
// (7)删除该image对应的元数据,即image-meta.json文件。
if err = cleanupRBDImageMetadataStash(stagingParentPath); err != nil {
klog.Errorf(util.Log(ctx, "failed to cleanup image metadata stash (%v)"), err)
return nil, status.Error(codes.Internal, err.Error())
}
return &csi.NodeUnstageVolumeResponse{}, nil
}
root@cld-dnode3-1091:/home/zhongjialiang# ls /home/cld/kubernetes/lib/kubelet/plugins/kubernetes.io/csi/pv/pvc-14ee5002-9d60-4ba3-a1d2-cc3800ee0893/globalmount/
image-meta.json 0001-0024-0bba3be9-0a1c-41db-a619-26ffea20161e-0000000000000004-1699e662-e83f-11ea-8e79-246e96907f74/
1.lookupRBDImageMetadataStash
从stagingParentPath的image-meta.json文件中读取image的元数据。
//ceph-csi/internal/rbd/rbd_util.go
// file name in which image metadata is stashed.
const stashFileName = "image-meta.json"
func lookupRBDImageMetadataStash(path string) (rbdImageMetadataStash, error) {
var imgMeta rbdImageMetadataStash
fPath := filepath.Join(path, stashFileName)
encodedBytes, err := ioutil.ReadFile(fPath) // #nosec - intended reading from fPath
if err != nil {
if !os.IsNotExist(err) {
return imgMeta, fmt.Errorf("failed to read stashed JSON image metadata from path (%s): (%v)", fPath, err)
}
return imgMeta, util.JoinErrors(ErrMissingStash, err)
}
err = json.Unmarshal(encodedBytes, &imgMeta)
if err != nil {
return imgMeta, fmt.Errorf("failed to unmarshall stashed JSON image metadata from path (%s): (%v)", fPath, err)
}
return imgMeta, nil
}
root@cld-dnode3-1091:/home/zhongjialiang# cat /home/cld/kubernetes/lib/kubelet/plugins/kubernetes.io/csi/pv/pvc-14ee5002-9d60-4ba3-a1d2-cc3800ee0893/globalmount/image-meta.json
{"Version":2,"pool":"kubernetes","image":"csi-vol-1699e662-e83f-11ea-8e79-246e96907f74","accessType":false,"encrypted":false}
2.detachRBDImageOrDeviceSpec
拼凑unmap命令,进行unmap rbd/nbd device。
//ceph-csi/internal/rbd/rbd_attach.go
func detachRBDImageOrDeviceSpec(ctx context.Context, imageOrDeviceSpec string, isImageSpec, ndbType, encrypted bool, volumeID string) error {
if encrypted {
mapperFile, mapperPath := util.VolumeMapper(volumeID)
mappedDevice, mapper, err := util.DeviceEncryptionStatus(ctx, mapperPath)
if err != nil {
klog.Errorf(util.Log(ctx, "error determining LUKS device on %s, %s: %s"),
mapperPath, imageOrDeviceSpec, err)
return err
}
if len(mapper) > 0 {
// mapper found, so it is open Luks device
err = util.CloseEncryptedVolume(ctx, mapperFile)
if err != nil {
klog.Errorf(util.Log(ctx, "error closing LUKS device on %s, %s: %s"),
mapperPath, imageOrDeviceSpec, err)
return err
}
imageOrDeviceSpec = mappedDevice
}
}
accessType := accessTypeKRbd
if ndbType {
accessType = accessTypeNbd
}
options := []string{"unmap", "--device-type", accessType, imageOrDeviceSpec}
_, stderr, err := util.ExecCommand(ctx, rbd, options...)
if err != nil {
// Messages for krbd and nbd differ, hence checking either of them for missing mapping
// This is not applicable when a device path is passed in
if isImageSpec &&
(strings.Contains(stderr, fmt.Sprintf(rbdUnmapCmdkRbdMissingMap, imageOrDeviceSpec)) ||
strings.Contains(stderr, fmt.Sprintf(rbdUnmapCmdNbdMissingMap, imageOrDeviceSpec))) {
// Devices found not to be mapped are treated as a successful detach
util.TraceLog(ctx, "image or device spec (%s) not mapped", imageOrDeviceSpec)
return nil
}
return fmt.Errorf("rbd: unmap for spec (%s) failed (%v): (%s)", imageOrDeviceSpec, err, stderr)
}
return nil
}
3.cleanupRBDImageMetadataStash
删除该image对应的元数据,即image-meta.json文件。
//ceph-csi/internal/rbd/rbd_util.go
func cleanupRBDImageMetadataStash(path string) error {
fPath := filepath.Join(path, stashFileName)
if err := os.Remove(fPath); err != nil {
return fmt.Errorf("failed to cleanup stashed JSON data (%s): (%v)", fPath, err)
}
return nil
}
至此,rbd driver-nodeserver的分析已经全部完成,下面做个总结。
rbd driver-nodeserver分析总结
(1)nodeserver主要包括了NodeGetCapabilities、NodeGetVolumeStats、NodeStageVolume、NodePublishVolume、NodeUnpublishVolume、NodeUnstageVolume、NodeExpandVolume方法,作用分别如下:
NodeGetCapabilities:获取ceph-csi driver的能力。
NodeGetVolumeStats:探测挂载存储的状态,并返回该存储的相关metrics给kubelet。
NodeExpandVolume:在node上做相应操作,将存储的扩容信息同步到node上。
NodeStageVolume:将rbd image map到node上的rbd/nbd device,并格式化后挂载到staging path。
NodePublishVolume:将NodeStageVolume方法中的staging path,mount到target path。
NodeUnpublishVolume:解除掉stagingPath到targetPath的挂载。
NodeUnstageVolume:先解除掉targetPath到rbd/nbd device的挂载,然后再unmap掉rbd/nbd device(即解除掉node端rbd/nbd device与ceph rbd image的挂载)。
(2)在kubelet调用NodeExpandVolume、NodeStageVolume、NodeUnstageVolume等方法前,会先调用NodeGetCapabilities来获取该ceph-csi driver的能力,看是否支持对这些方法的调用。
(3)kubelet定时循环调用NodeGetVolumeStats,获取volume相关指标。
(4)存储扩容分为两大步骤,第一步是csi的ControllerExpandVolume,主要负责将底层存储扩容;第二步是csi的NodeExpandVolume,当volumemode是filesystem时,主要负责将底层rbd image的扩容信息同步到rbd/nbd device,对xfs/ext文件系统进行扩展;当volumemode是block,则不用进行node端扩容操作。
(5)一个rbd image挂载给一个node上的多个pod时,NodeStageVolume方法只会被调用一次,NodePublishVolume会被调用多次,即出现该情况时,staging path只有一个,而target path会有多个。你可以这样理解,staging path对应的是rbd image,而target path对应的是pod,所以当一个rbd image挂载给一个node上的多个pod时,staging path只有一个,而target path会有多个。解除挂载也同理,当挂载了某个rbd image的所有pod都被删除,NodeUnstageVolume方法才会被调用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号