[Camera] Camera理论需要的mipi lane数
转自:https://online.mediatek.com/FAQ#/HW/FAQ19342
理论计算公式:
Camera 有效像素 * ADC色彩深度 * 帧率 * (1+20%) < lane数 * mipi速率
1、Camera 有效像素
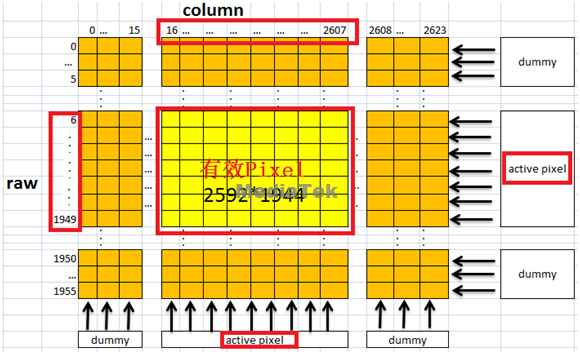
以下图为例:
总像素:2624 * 1956 = 5132544
有效像素:2592 * 1944 = 5038848
2、ADC色彩深度

色彩深度越高,可用的颜色就越多
10bit表示ADC的采集精度,在Camera中表示一个像素的采集精度为210=1024
一般Camera Sensor使用的是8或10位的RGB RAW,具体查看Camera Sensor资料
3、MIPI速率
举例:MT6735,5M摄像头,有效像素为2592 * 1944,30fps帧率,10位ADC色彩深度,最少几lane
(1) 从平台资料可知,MIPI CSI速率最高为1.5Gbps
(2) 2592 * 1944 * 10 * 30 * (1+20%) = 1.8Gbps
lane = 1.8 / 1.5 > 1,所以最少需要 2 lane

 浙公网安备 33010602011771号
浙公网安备 33010602011771号