MAX7219点阵屏四合一—基于CH32V307的应用
参考链接:https://blog.csdn.net/weixin_46957846/article/details/127352759
本篇文章为基于CH32V307的MAX7219级联应用,代码是基于上参考链接代码基础上修改,若有侵权请联系及时删除。该应用测试所用模块为一个四级级联模块,参考链接代码下载应用4个点阵模块均显示均显示同一个字符。该应用在此基础上进行了修改,可以使4个点阵模块显示不同的字符。具体代码会附在下文章介绍中。
关于MAX7219介绍
MAX7219 是一种集成化的串行输入/输出共阴极显示驱动器,它连接微处理器与8位数字的7段数字LED显示,也可以连接条线图显示器或者64个独立的LED。其上包括一个片上的B型BCD编码器、多路扫描回路,段字驱动器,而且还有一个8*8的静态RAM用来存储每一个数据。只有一个外部寄存器用来设置各个LED的段电流。《以上信息来自MAX7219手册》
关于代码介绍
程序代码中,片选引脚CS采用软件控制的方式。CH32V307不支持使用位操作进行写0或写1,因此程序中调用GPIO_WriteBit函数对对应引脚进行写0或写1操作。相关程序代码如下:
max7219.h文件
#ifndef __MAX7219_H #define __MAX7219_H #include "ch32v30x.h" #define number 4 //级联个数 #define brl 6 //亮度级别 #define SPI_IS_HARDWARE 1 //1:硬件SPI;0:软件模拟SPI #define Max7219_pinDIN_GPIO GPIO_Pin_7 #define Max7219_pinCS_GPIO GPIO_Pin_3 #define Max7219_pinCLK_GPIO GPIO_Pin_5 #define Max7219_pinDIN(i) GPIO_WriteBit(GPIOA,GPIO_Pin_7,i) #define Max7219_pinCS(i) GPIO_WriteBit(GPIOA,GPIO_Pin_3,i) #define Max7219_pinCLK(i) GPIO_WriteBit(GPIOA,GPIO_Pin_5,i) void Max7219_GPIO_Init(void); void Write_Max7219_byte(u8 data); void Write_Max7219(u8 addr,u8 dat); void Init_MAX7219(void); #endif
max7219.c文件
#include "max7219.h" #include "debug.h" u8 code_disp1[39][8]= { {0x3C,0x42,0x42,0x42,0x42,0x42,0x42,0x3C},//0 {0x08,0x18,0x28,0x08,0x08,0x08,0x08,0x3E},//1 {0x7E,0x02,0x02,0x7E,0x40,0x40,0x40,0x7E},//2 {0x3E,0x02,0x02,0x3E,0x02,0x02,0x3E,0x00},//3 {0x08,0x18,0x28,0x48,0xFE,0x08,0x08,0x08},//4 {0x3C,0x20,0x20,0x3C,0x04,0x04,0x3C,0x00},//5 {0x3C,0x20,0x20,0x3C,0x24,0x24,0x3C,0x00},//6 {0x3E,0x22,0x04,0x08,0x08,0x08,0x08,0x08},//7 {0x00,0x3E,0x22,0x22,0x3E,0x22,0x22,0x3E},//8 {0x3E,0x22,0x22,0x3E,0x02,0x02,0x02,0x3E},//9 {0x08,0x14,0x22,0x3E,0x22,0x22,0x22,0x22},//A {0x3C,0x22,0x22,0x3E,0x22,0x22,0x3C,0x00},//B {0x3C,0x40,0x40,0x40,0x40,0x40,0x3C,0x00},//C {0x7C,0x42,0x42,0x42,0x42,0x42,0x7C,0x00},//D {0x7C,0x40,0x40,0x7C,0x40,0x40,0x40,0x7C},//E {0x7C,0x40,0x40,0x7C,0x40,0x40,0x40,0x40},//F {0x3C,0x40,0x40,0x40,0x40,0x44,0x44,0x3C},//G {0x44,0x44,0x44,0x7C,0x44,0x44,0x44,0x44},//H {0x7C,0x10,0x10,0x10,0x10,0x10,0x10,0x7C},//I {0x3C,0x08,0x08,0x08,0x08,0x08,0x48,0x30},//J {0x00,0x24,0x28,0x30,0x20,0x30,0x28,0x24},//K {0x40,0x40,0x40,0x40,0x40,0x40,0x40,0x7C},//L {0x81,0xC3,0xA5,0x99,0x81,0x81,0x81,0x81},//M {0x00,0x42,0x62,0x52,0x4A,0x46,0x42,0x00},//N {0x3C,0x42,0x42,0x42,0x42,0x42,0x42,0x3C},//O {0x3C,0x22,0x22,0x22,0x3C,0x20,0x20,0x20},//P {0x1C,0x22,0x22,0x22,0x22,0x26,0x22,0x1D},//Q {0x3C,0x22,0x22,0x22,0x3C,0x24,0x22,0x21},//R {0x00,0x1E,0x20,0x20,0x3E,0x02,0x02,0x3C},//S {0x00,0x3E,0x08,0x08,0x08,0x08,0x08,0x08},//T {0x42,0x42,0x42,0x42,0x42,0x42,0x22,0x1C},//U {0x42,0x42,0x42,0x42,0x42,0x42,0x24,0x18},//V {0x00,0x49,0x49,0x49,0x49,0x2A,0x1C,0x00},//W {0x81,0x42,0x24,0x18,0x18,0x24,0x42,0x81},//X {0x41,0x22,0x14,0x08,0x08,0x08,0x08,0x08},//Y {0x00,0x7F,0x02,0x04,0x08,0x10,0x20,0x7F},//Z {0x08,0x7F,0x49,0x49,0x7F,0x08,0x08,0x08},//中 {0xFE,0xBA,0x92,0xBA,0x92,0x9A,0xBA,0xFE},//国 {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x08},//. }; #if SPI_IS_HARDWARE //判断SPI方式 void Max7219_GPIO_Init(void) //硬件SPI { GPIO_InitTypeDef GPIO_InitStructure={0}; SPI_InitTypeDef SPI1_InitStructure={0}; //配置SPI1管脚 RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO|RCC_APB2Periph_GPIOA, ENABLE); RCC_APB2PeriphClockCmd(RCC_APB2Periph_SPI1,ENABLE); GPIO_InitStructure.GPIO_Pin=Max7219_pinCS_GPIO;//CS/LOAD GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP; GPIO_Init(GPIOA,&GPIO_InitStructure); GPIO_InitStructure.GPIO_Pin=Max7219_pinCLK_GPIO|Max7219_pinDIN_GPIO;//CLK MISO MOSI GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz; GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; GPIO_Init(GPIOA,&GPIO_InitStructure); SPI_I2S_DeInit(SPI1); SPI1_InitStructure.SPI_Direction=SPI_Direction_2Lines_FullDuplex; SPI1_InitStructure.SPI_BaudRatePrescaler=SPI_BaudRatePrescaler_64; SPI1_InitStructure.SPI_DataSize=SPI_DataSize_8b; SPI1_InitStructure.SPI_Mode=SPI_Mode_Master; SPI1_InitStructure.SPI_FirstBit=SPI_FirstBit_MSB; //高位在先 SPI1_InitStructure.SPI_CPOL = SPI_CPOL_High; SPI1_InitStructure.SPI_CPHA = SPI_CPHA_2Edge; SPI1_InitStructure.SPI_NSS = SPI_NSS_Soft; SPI1_InitStructure.SPI_CRCPolynomial = 7; SPI_Init(SPI1, &SPI1_InitStructure); SPI_Cmd(SPI1, ENABLE); } void Write_Max7219_byte(u8 data) { Max7219_pinCS(0); SPI_I2S_SendData(SPI1, data); //写入数据 } //功能:向MAX7219内部寄存器写入数据 //参数:addr、dat void Write_Max7219(u8 addr,u8 dat) { Max7219_pinCS(0); SPI_I2S_SendData(SPI1, addr); //写入地址 Delay_Us(10);//必须,点阵不显示时可以延长此延时调试 SPI_I2S_SendData(SPI1, dat); //写入数据 Delay_Us(10);//必须,点阵不显示时可以延长此延时调试 //Max7219_pinCS(1)该函数若不注释掉,会导致级联的模块全部显示同一个字符,无法进行单独控制,若要使级联模块全部显示一样时,可取消该注释 // Max7219_pinCS(1); } #else void Max7219_GPIO_Init(void)//软件模拟SPI { GPIO_InitTypeDef GPIO_InitStructure={0}; RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE); GPIO_InitStructure.GPIO_Pin = Max7219_pinCS_GPIO | Max7219_pinDIN_GPIO | Max7219_pinCLK_GPIO; GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; GPIO_Init(GPIOA,&GPIO_InitStructure); } //功能:向MAX7219写入字节 //入口参数:data void Write_Max7219_byte(u8 data) { u8 i; Max7219_pinCS(0); for(i = 0;i<8;i++) { Max7219_pinCLK(0); Max7219_pinDIN((data & 0x80)); data = data<<1; Max7219_pinCLK(1); } } //功能:向MAX7219内部寄存器写入数据 //参数:addr、dat void Write_Max7219(u8 addr,u8 dat) { Max7219_pinCS(0); Write_Max7219_byte(addr); //写入地址 Delay_Us(10); Write_Max7219_byte(dat); //写入数据 Delay_Us(10); // Max7219_pinCS(1); } #endif /* 关于MAX7219的初始化,当需要级联模块全部显示一样,或者只有一个显示模块时,在初始化配置时,对下列函数配置一次即可 Write_Max7219(0x09, 0x00); //译码方式:无 Write_Max7219(0x0a, 0x03); //亮度 Write_Max7219(0x0b, 0x07); //扫描界限;8个数码管显示 Write_Max7219(0x0c, 0x01); //掉电模式:0,普通模式:1 Write_Max7219(0x0f, 0x00); //显示测试:1;测试结束,正常显示:0 若需要对每个模块进行控制,则需要根据级联数量进行初始化,如下,初始化过程中需要对片选引脚进行相应的拉高拉低 */ void Init_MAX7219(void) { u8 i,j; for(i=0;i<5;i++) { for(j=0;j<number;j++) { switch(i) { case 0:Write_Max7219(0x09, 0x00); break; //译码方式:BCD码 不译码 case 1:Write_Max7219(0x0A, brl); break; //亮度 0-15 共16级 case 2:Write_Max7219(0x0B, 0x07); break; //扫描界限;8位显示 case 3:Write_Max7219(0x0C, 0x01); break; //掉电模式:0,普通模式:1 case 4:Write_Max7219(0x0F, 0x00); break; //显示测试:1;测试结束,正常显示:0 } Max7219_pinCS(1); Delay_Us(1); Max7219_pinCS(0); } } }
main.c文件
/********************************** (C) COPYRIGHT ******************************* * File Name : main.c * Author : WCH * Version : V1.0.0 * Date : 2021/06/06 * Description : Main program body. * Copyright (c) 2021 Nanjing Qinheng Microelectronics Co., Ltd. * SPDX-License-Identifier: Apache-2.0 *******************************************************************************/ /* *@Note */ #include "debug.h" #include "ch32v30x.h" #include "max7219.h" /* Global typedef */ /* Global define */ /* Global Variable */ extern u8 code_disp1[39][8]; /********************************************************************* * @fn main * * @brief Main program. * * @return none */ int main(void) { u8 i,j; NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); Delay_Init(); USART_Printf_Init(115200); printf("SystemClk:%d\r\n",SystemCoreClock); printf("This is printf example\r\n"); Max7219_GPIO_Init(); Delay_Ms(500); Init_MAX7219(); while(1) { // //以下方式可用于控制级联模块显示相同的字符 // Max7219_pinCS(1); // Delay_Ms(1); // for(j=0;j<38;j++) // { // for(i=1;i<9;i++) // { // Write_Max7219(i,code_disp1[j][i-1]); // } // Delay_Ms(500); // } //以下方式可单独控制每个模块显示不同的字符 for(j=0;j<8;j++) { for(i=0;i<number;i++) { if(i==0) { Write_Max7219(j+1,code_disp1[i][j]); } else if(i==1) { Write_Max7219(j+1,code_disp1[i][j]); } else if(i==2) { Write_Max7219(j+1,code_disp1[10][j]); } else if(i==3) { Write_Max7219(j+1,code_disp1[12][j]); } else { Write_Max7219(j+1,0x00); } } Max7219_pinCS(1); Delay_Us(1); Max7219_pinCS(0); } } }
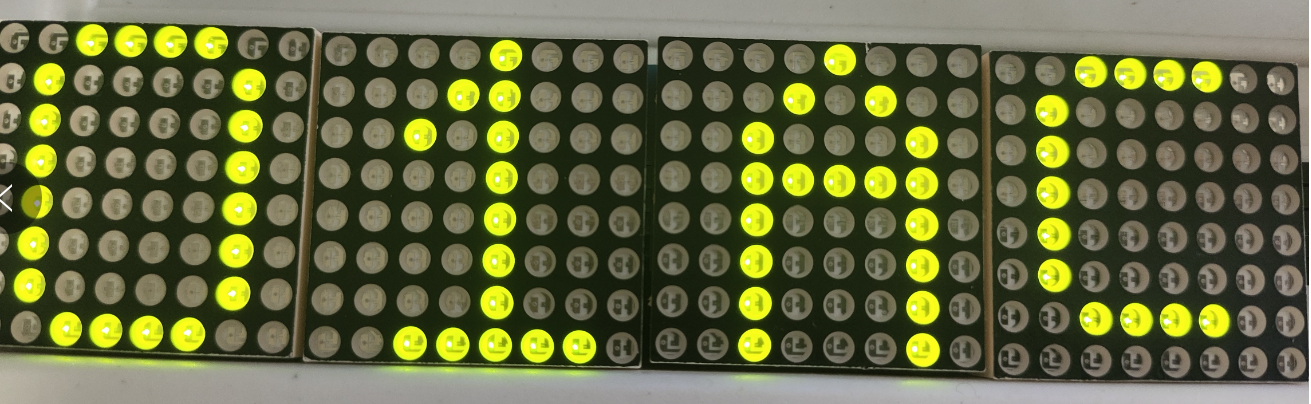
编译下载,显示结果如下: