Motion Planning for Mobile Robots 学习笔记7
MDP-Based Planning
以往:根据起点与终点选取路径。
决策树的概念,根据环境的动态变化选取最优的路径。
Outline 大纲
提出问题:
- Uncertainties in Planning
- Planning with Uncertainties
- Markov Decision Process
解决问题:
4. Minimax Cost Planning
5. Expected Cost Planning
6. Real Time Dynamic Programming
Uncertainties in Planning 规划中的不确定性
到现在为止,假设机器人在执行动作完美无缺,对状态有充分了解的情况下没有任何不确定性。
按不确定性的由来分类
不确定性来自于:感知和执行的不确定性。因为,在实际应用中,执行和状态估计都不是完美的。
- 执行不确定性:打滑,崎岖的地形,风(的影响),空气阻力,控制误差等
- 状态估计不确定性:传感器噪声,校准误差,估计不完善,局部可观察性等。
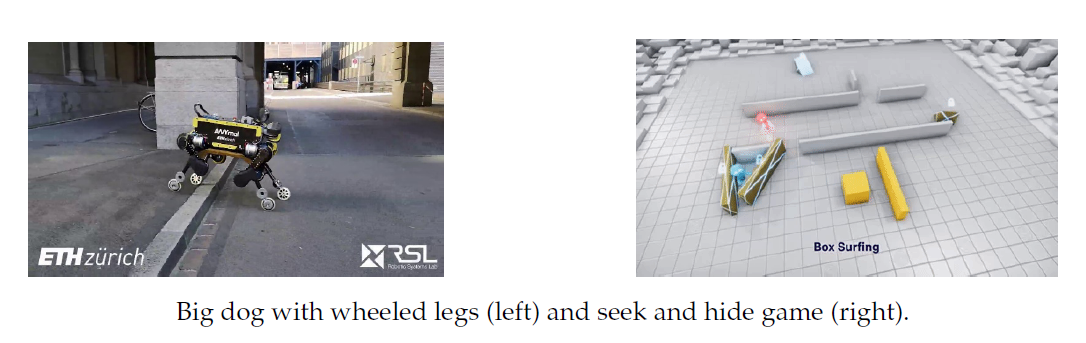
左图是机器人打滑;右图是两机器人捉迷藏,彼此难以判断对方下一时刻的位置
按机器人可利用信息量分类(数学角度)
从数学角度来看,不确定性可以分为两类,它们表示机器人可以使用多少信息(知道多少信息)。
不确定性模型
- 不确定性:机器人不知道会受到哪种类型的不确定性或干扰。
- 概率:机器人通过观察和收集统计数据来估计不确定性。
Planning with Uncertainties 存在不确定性下的规划
双决策者模型
之前的运动规划中,只有机器人一个参与者。但在存在不确定性的情况下,需要引入另一个参与者。
为了正式描述这个概念,我们首先介绍两个决策者来对不确定性的产生建模,然后对具有不确定性的计划类型进行建模。
决策者
- 机器人(Robot)是基于完全已知的状态和完美执行来执行计划的主要决策者。
- 自然(Nature)给机器人制定的计划的执行增加了不确定性(产生所有的干扰),这对于机器人来说是无法预测的。
单步问题定义
核心问题:考虑到与自然界的博弈,机器人的最佳决策是什么?
A Game Against Nature(Independent Game)独立博弈
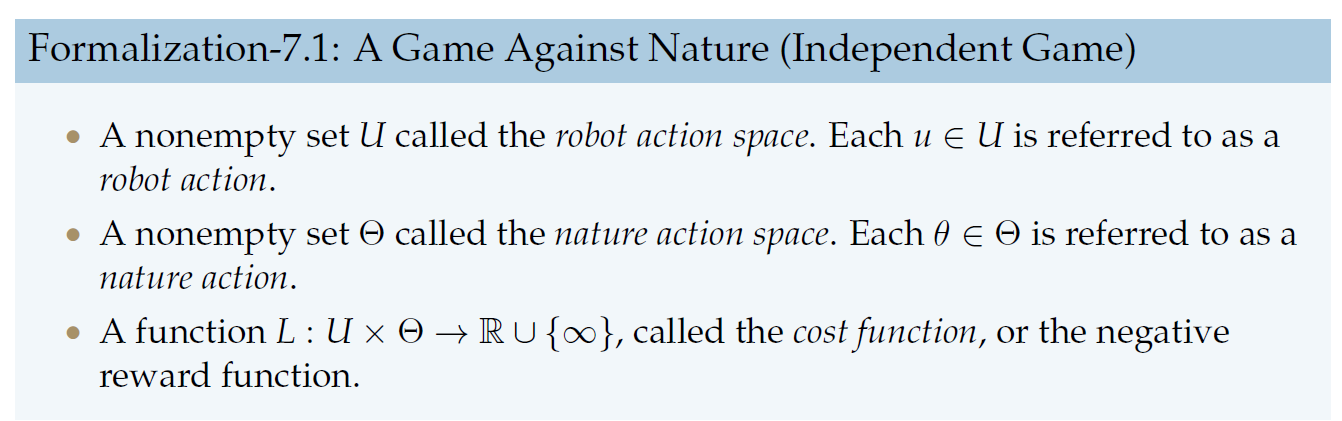
- 一个非空集\(U\)称为机器人动作空间。每个\(u\in U\)都称为机器人动作。
- 一个非空集\(\Theta\)称为自然动作空间。每个\(\theta \in \Theta\)被称为自然动作。
两个动作空间相互独立。 - 函数\(L:U\times \Theta \rightarrow \mathbb{R}\cup \{\infty\}\),称为成本函数或负回报函数。
通过优化\(L\)可以在自然参与下,寻找机器人的最优规划。
Nature Knows the Robot Action(Dependent Game)从属博弈
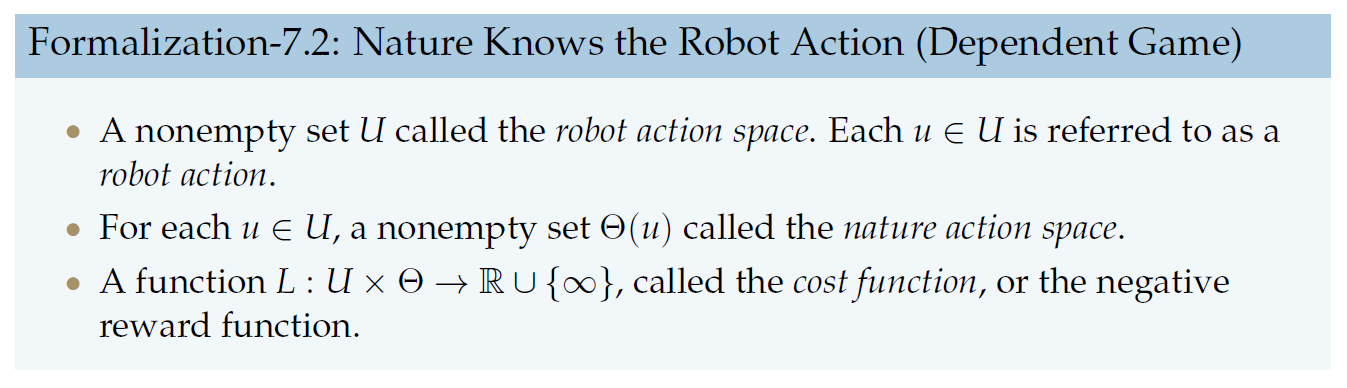
- 一个非空集\(U\)称为机器人动作空间。每个\(u\in U\)都称为机器人动作。
- 对于每个每个\(u\in U\),一个非空集\(\Theta\)称为自然动作空间。
自然动作空间依赖于机器人动作空间。 - 函数\(L:U\times \Theta \rightarrow \mathbb{R}\cup \{\infty\}\),称为成本函数或负回报函数。
单步问题两种解法
One-step Worst-Case Analysis 一步最坏情况分析
- 在非确定性模型下,独立博弈中的\(P(\theta)\)和从属博弈中的\(P(\theta |u_k)\)是未知的;
- 机器人无法预测自然的行为,可以假设自然会故意选择会导致成本最高(对机器人最不利)的动作。
- 因此,通过假设最坏的情况来做出决策是合理的。

One-step Expected-Case Analysis 一步期望情况分析
- 在概率模型下,独立博弈中的\(P(\theta)\)和从属博弈中的\(P(\theta |u_k)\)是已知(不精准,已知其规律或分布)的;
- 假定已观察到所应用的自然动作,并且自然在动作选择中采用了随机策略。
- 因此,我们优化其平均代价的期望。

多步情况问题定义
Discrete Planning with Nature 存在不确定性下的离散规划

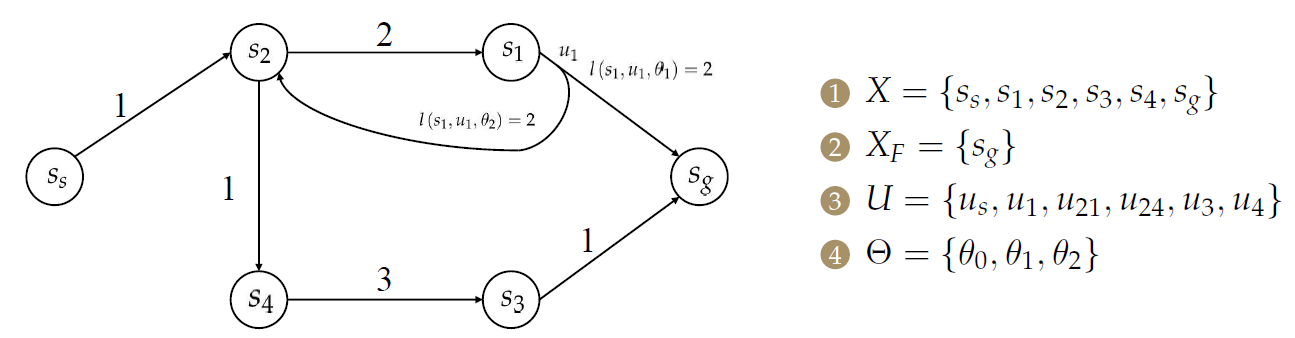
- 【1】具有初始状态\(x_s\)和目标集\(X_F\subset X\)的非空状态空间\(X\)。
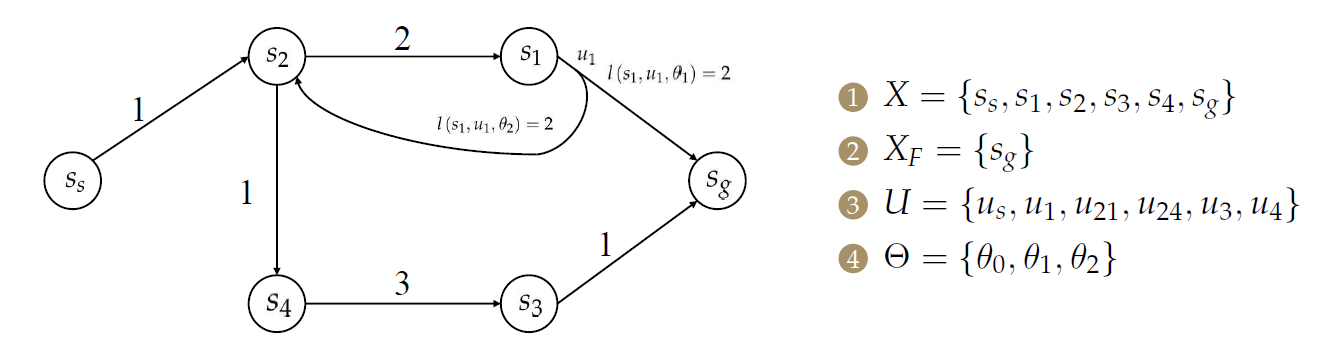
- 【2】对于每个状态\(x\in X\),有一个有限且非空的机器人动作空间\(U(x)\)。对于每个\(x\in X\)和\(u\in U(x)\),有一个有限且非空的自然动作空间\(\Theta (x,u)\)。
对于上图而言,机器人在\(s_s\)处执行\(u_s\)到达\(s_2\),而在\(s_1\)处机器人执行\(u_1\)会受到不同的自然干扰\(\theta_1\)或\(\theta_2\),使之到达不同的状态(\(s_2\)或\(s_g\))。
在此处,\(\theta_0\)为不施加干扰。
Multi-step Discrete Planning with Nature 存在不确定性下的多步离散规划

(接上述步骤)
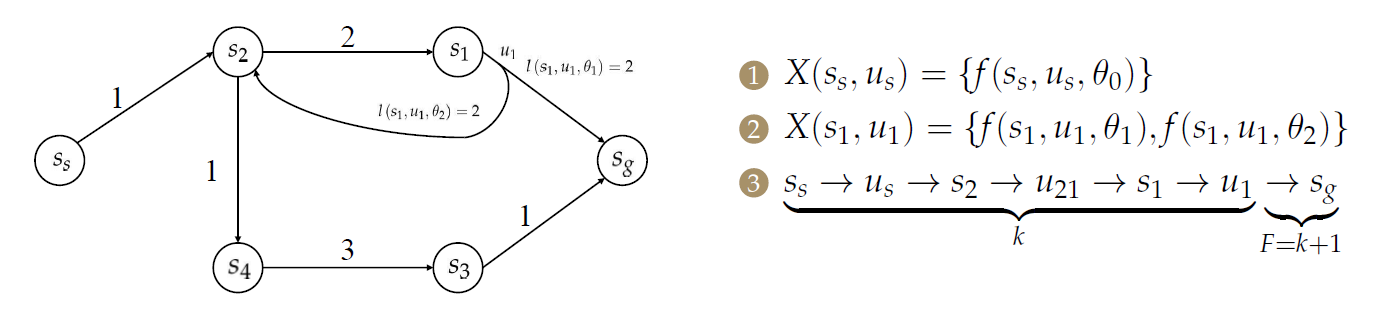
- 【3】多步情况下需要对每个\(x\in X\)、\(u\in U(x)\)和\(\theta \in \Theta(x,u)\)定义状态转移方程\(f(x,u,\theta)\)
状态转移方程的结果不是唯一的,在离散情况下为集合(并有相应的概率),在连续情况下呈现一定的分布。
【第一行】对于离散情况,对于每个状态机器对于的动作,枚举自然的各种扰乱,随之产生下一时刻的状态。
【第二行】对于连续情况,\(x_{k+1}\)与\(\theta_k\)服从一个依赖于\(x_k\)和\(u_k\)的联合概率分布,对其按\(\theta_k\)积分,可得到连续情况下的下一时刻分布。
使用离散状态下的计算方法:
在机器人在\(s_s\)处执行\(u_s\),由于自然的动作只有\(\theta_0\),机器人的动作也只有\(u_s\),因此其只能到达\(s_2\)。
而在\(s_1\)处机器人执行\(u_1\)会受到不同的自然干扰\(\theta_1\)或\(\theta_2\),因此,其\(X_{k+1}\)有两个元素,使之到达不同的状态(\(s_2\)或\(s_g\))。 - 【4】不同于单步的规划,相应定义以\(k\)表示的一组阶段(stages)。也即机器人的规划由若干个连续的步骤组成。
以\(k=1\)开始并且无限期地继续或者以最大阶段\(k=K+1=F\)结束。
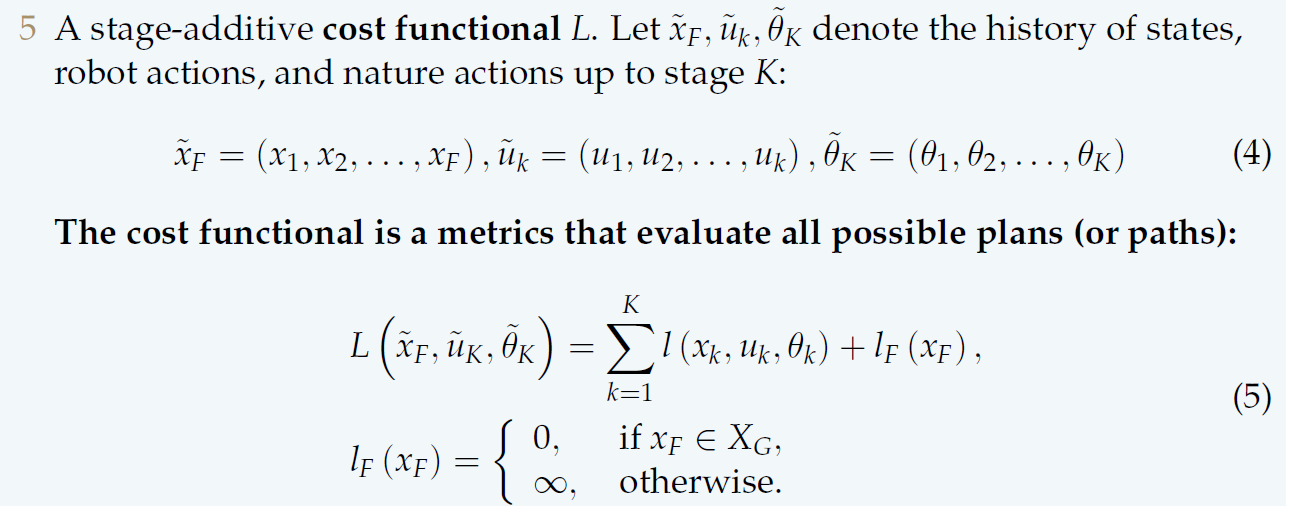
- 【5】与单步规划类似,相应定义代价函数\(L\)。最简单的方法是枚举计算。
\(l\)代表单步的代价函数,从\(k=1\)累加到\(k=K\)也即到达终点,最后加上终点处的代价\(l_F\)。
从中选择代价最小的\(L\),其对应的\(u_k\)也即最优决策。
但事实上,\(u_k\)往往是以决策树的形式存在的。
Markov Decision Process 马尔可夫决策过程
MDP与Planning
上一章中使用规划的建模方法对存在不确定性下的规划进行描述,但在Learning领域有现成的框架MDP可以解决这一问题。
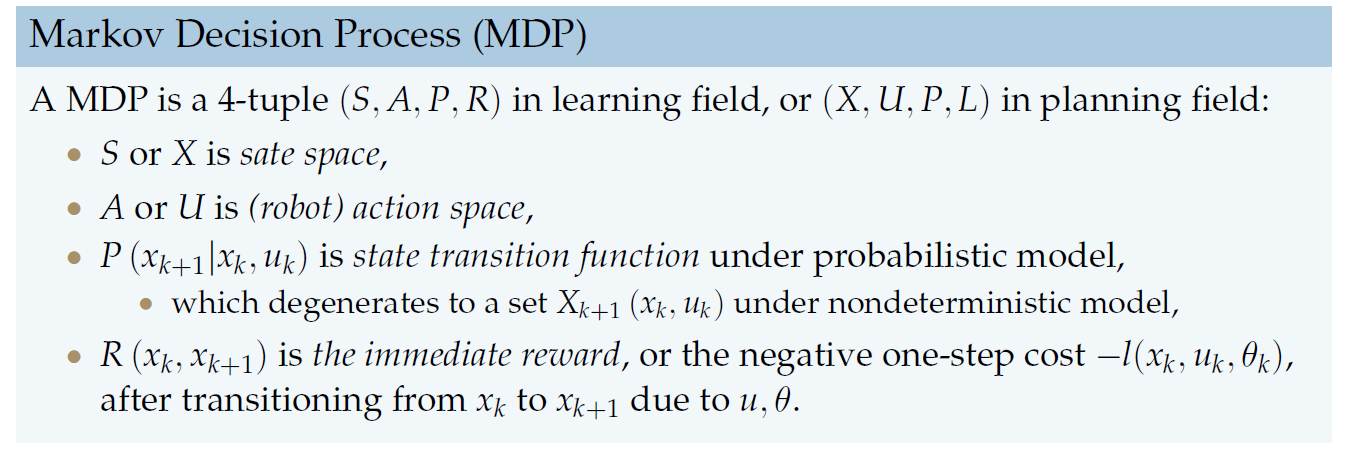
事实上,只是使用了不同的符号,其实质是一样的。
具有不确定性的计划的第一个困难(也可能是最为困难的)在于使用MDP模型正确地表达我们的问题,而非求解一个MDP问题。
例如:该问题的状态空间是什么?动作空间是什么?转移函数(transition function)是什么?如何定义代价函数?
MDP建模的例子
基于网格的最短路径问题,具有自然干扰。
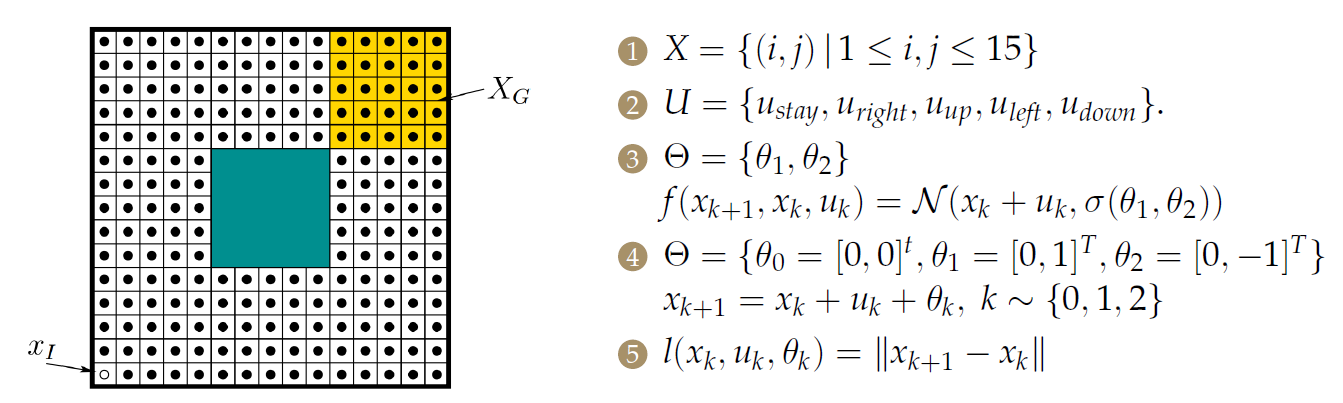
状态空间就是栅格中的点;
动作是四连通(也可以采用八连通);
自然的动作空间是最难以定义的。
- 第一种:【3】使用连续的方式,定义为机器人位置附近的高斯分布
- 第二种:【4】使用离散的方式,定义规定好的不确定距离。
代价函数简单地定义为两状态之间的距离。
求解上述例子
与之前的path和trajectory具有本质不同,因为存在自然的干扰,因此必须是在执行动作之后,受到干扰到达一个位置,并决策在当前位置下应该采取什么动作(决策树)。
-
定义plan(计划):\(\pi:X\rightarrow U\),其本质是从状态空间到动作空间的映射,决定机器人在某种情况下执行何种动作。
-
定义轨迹集合:\(\mathcal{H}(\pi,x_s)\),其表示由\(\pi\)引发的从\(x_s\)开始的轨迹集合。
一条轨迹即\((\tilde{x},\tilde{u},\tilde{\theta})\in \mathcal{H}(\pi,x_s)\)。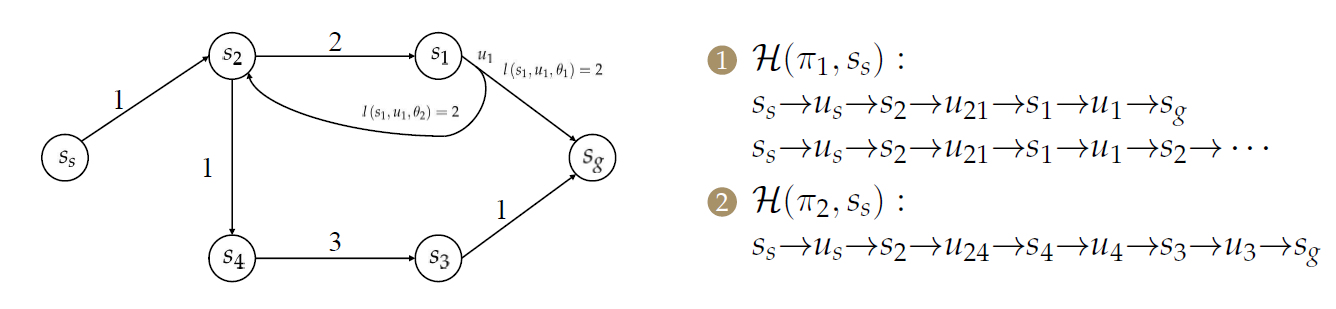
\(\pi_1\)倾向于走路径的上半部分,\(\pi_2\)倾向于走路径的上半部分。 -
定义代价函数
定义特定计划\(\pi\)(而不是轨迹)的成本为\(G_{\pi}(x_s)\):目标成本。用于评估该计划的总体表现。
- worst-case
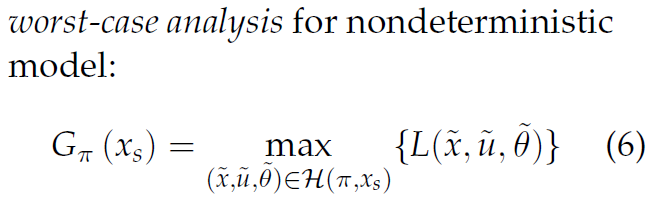
穷举所有轨迹,寻找最大成本。 - expected-case
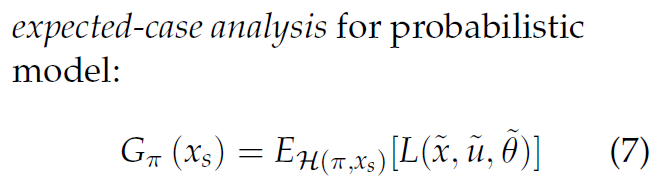
穷举所有轨迹,计算平均成本。
- worst-case
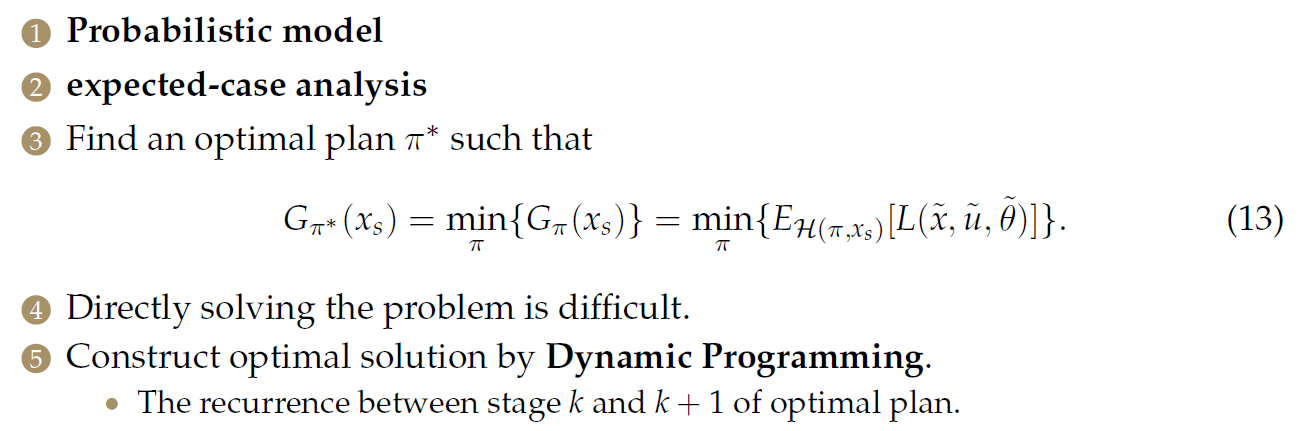
Minimax Cost Planning
解法
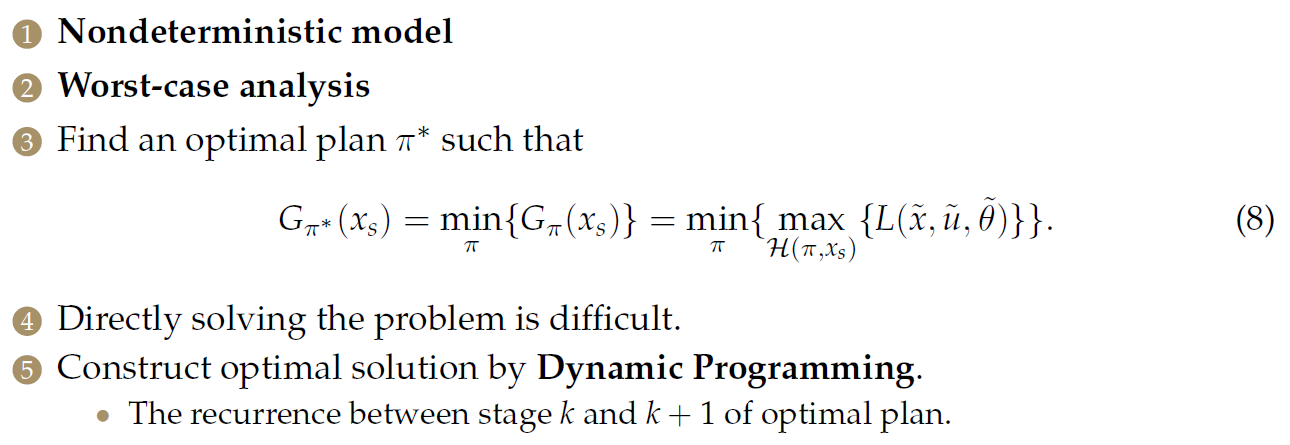
直接求解该问题十分困难(指数爆炸)
使用动态规划的方法,寻找第k步和第k+1步之间的关系。
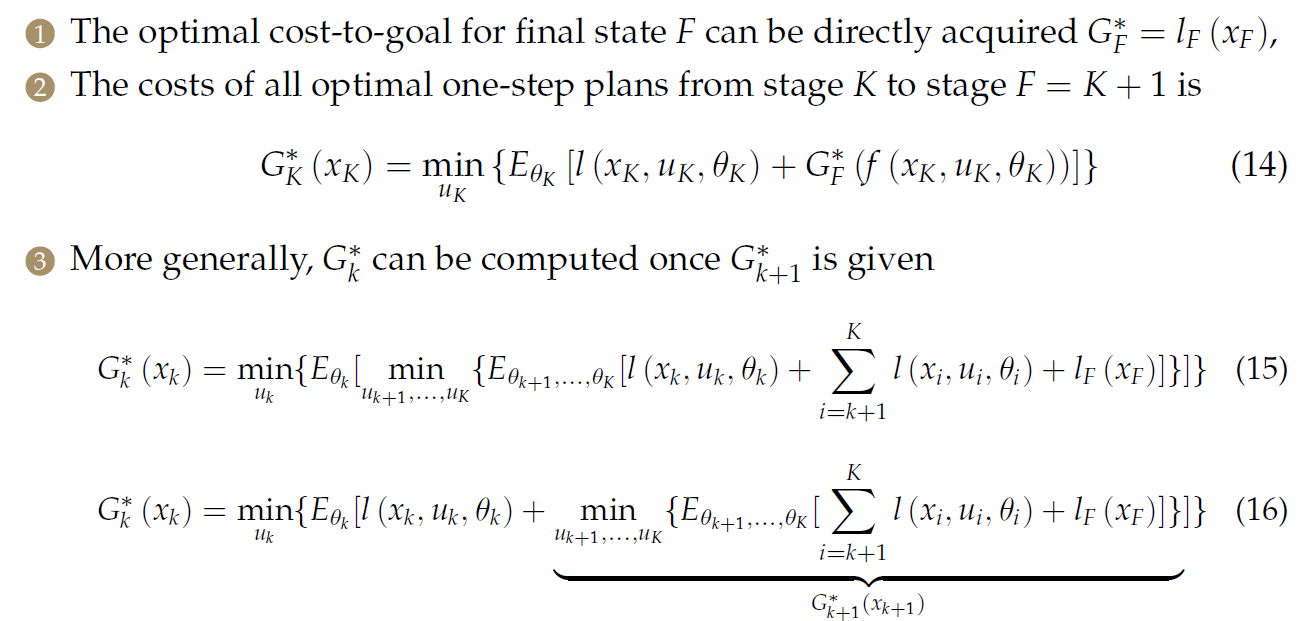
- 最终状态\(F\)的最佳目标成本可以直接获得$G^*_F = l_F(x_F),
- 从阶段\(K\)到阶段\(F = K + 1\)的所有最优一步计划的成本为

- 更一般地情况下,给出\(G^*_{k+1}\)时可计算\(G^*_k\)如下:
由此,可以得到动态规划的递归方程:
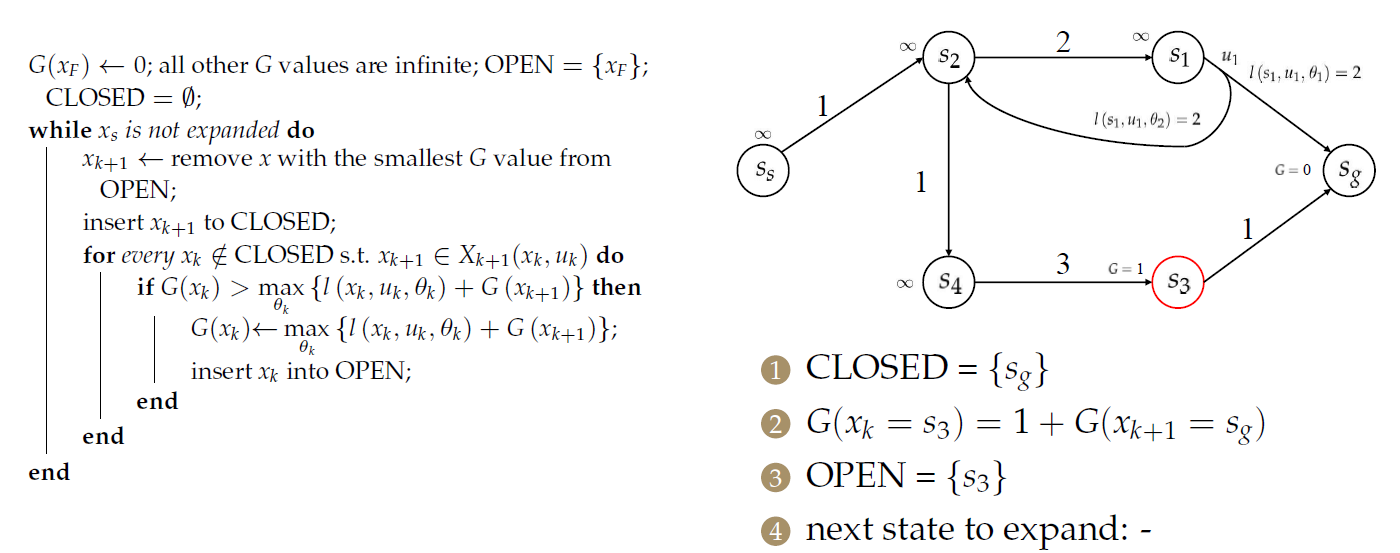
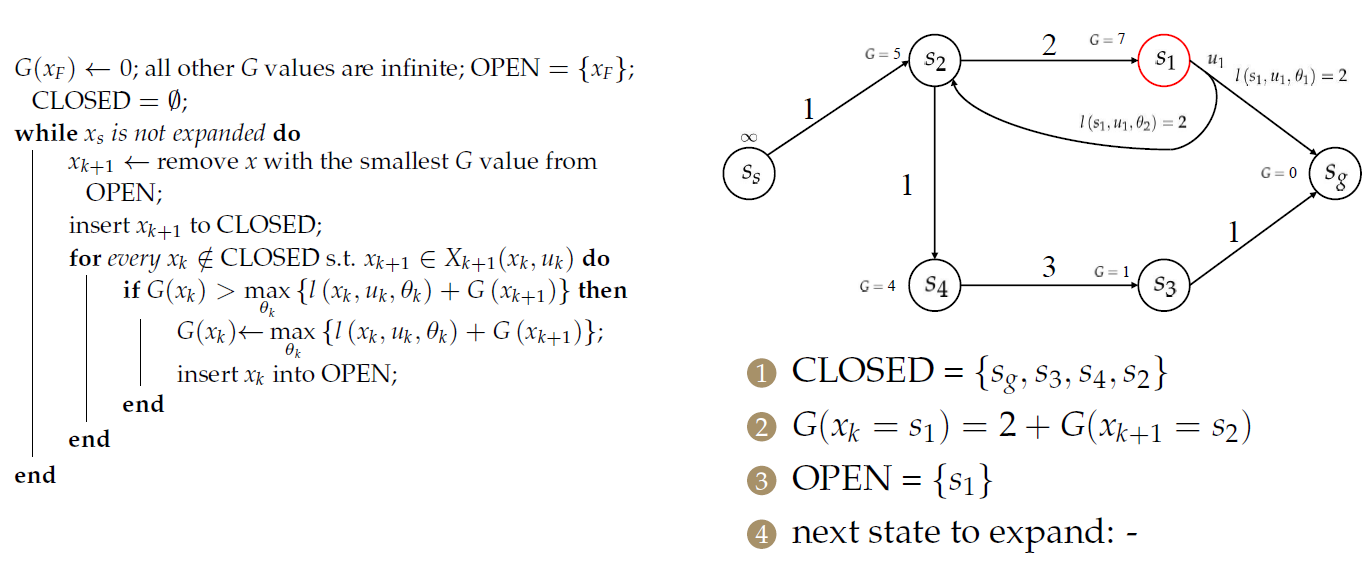
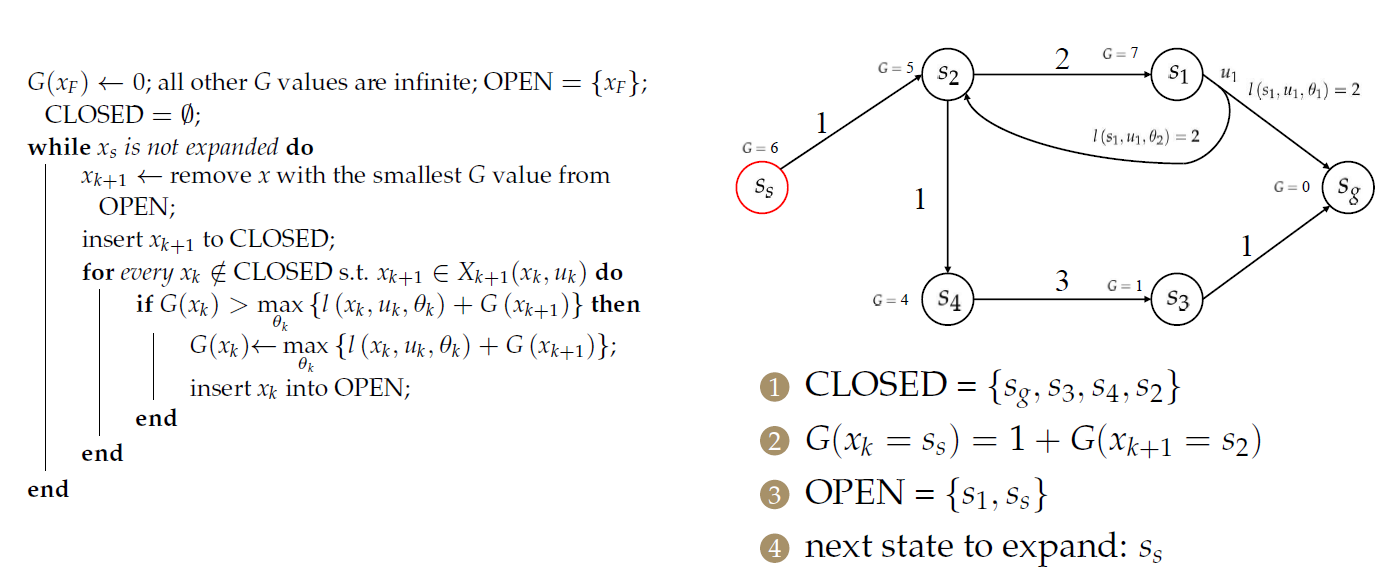
示例
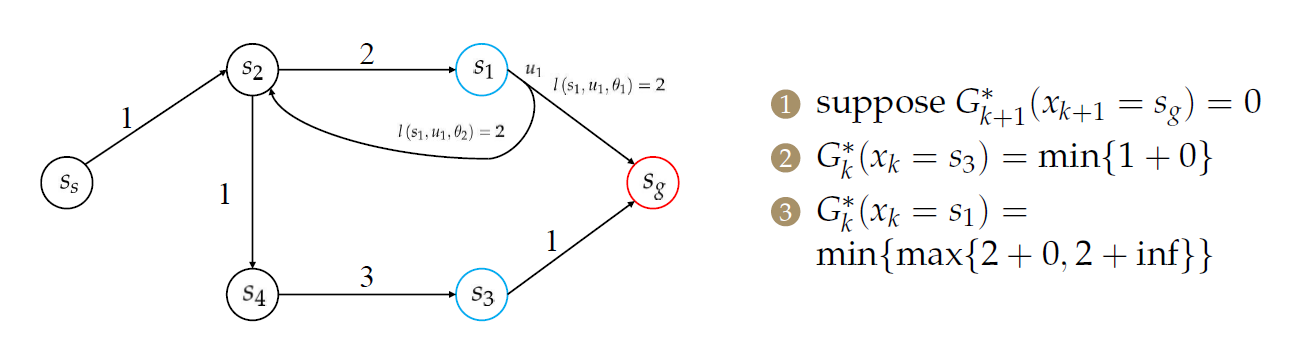
首先假设终点处的cost-to-goal(目标成本)是0,其余点均为\(\infty\)。
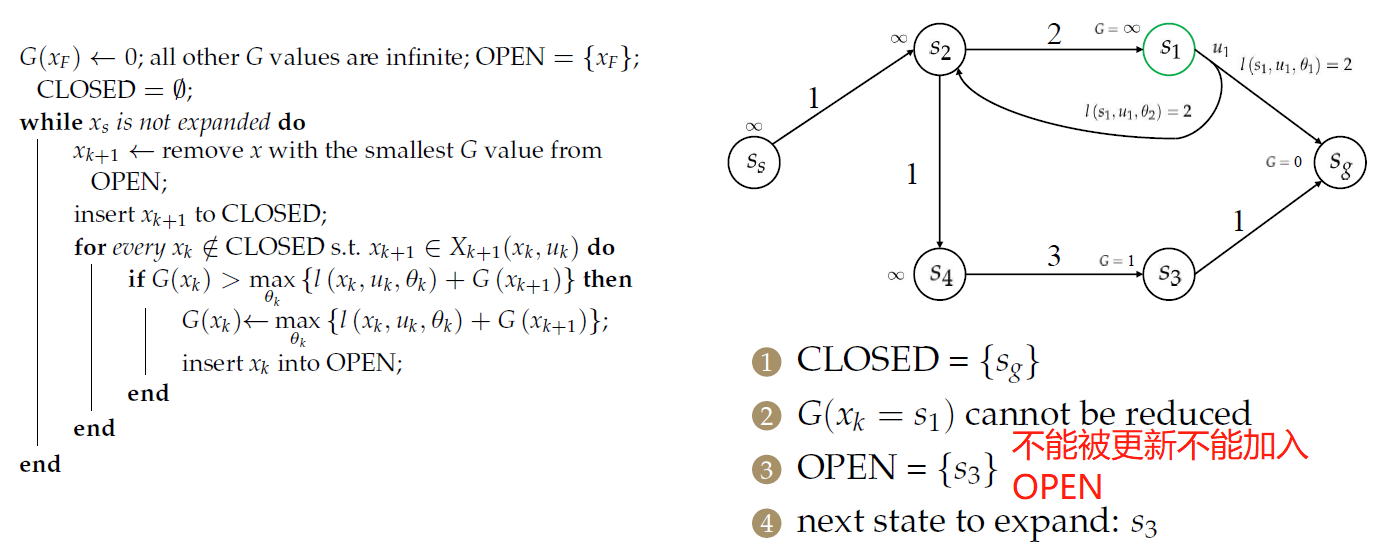
随后,计算\(s_3\)和\(s_1\)的目标成本。
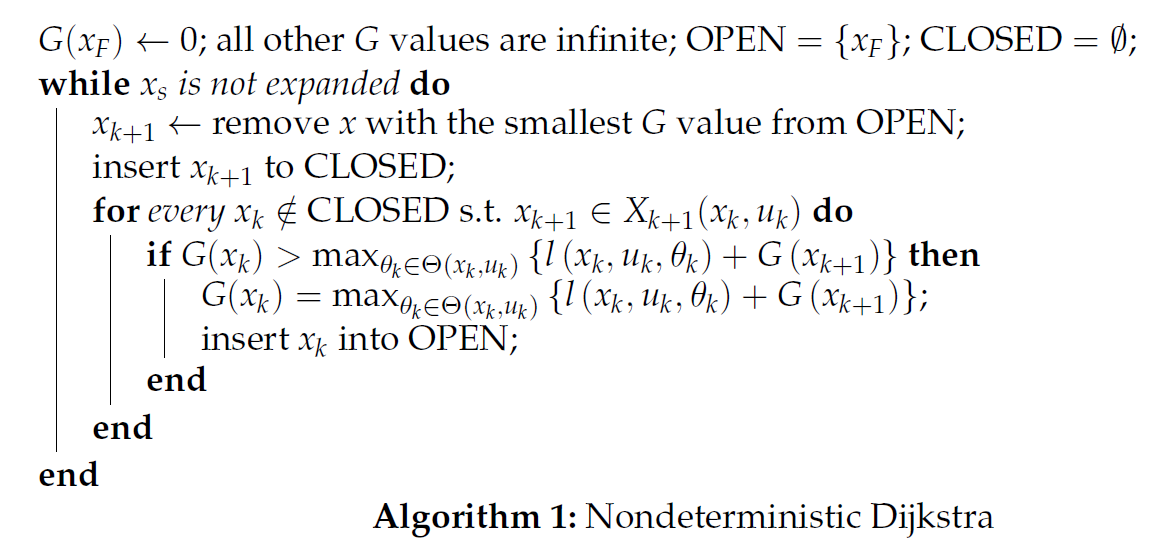
Nondeterministic Dijkstra
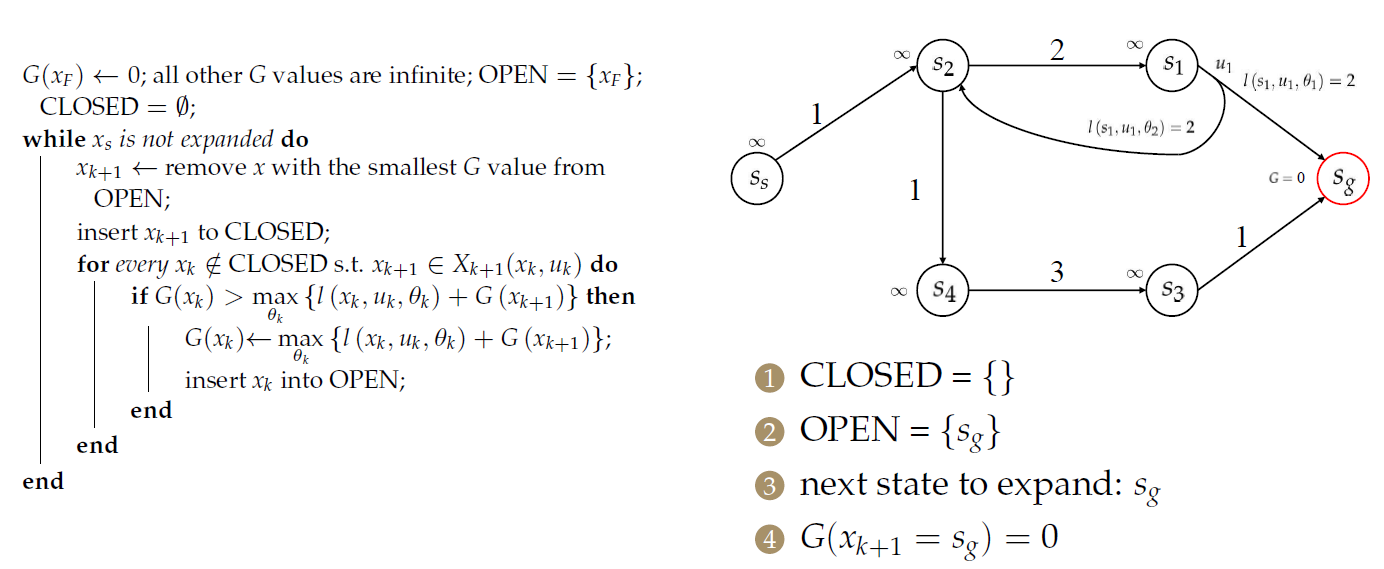
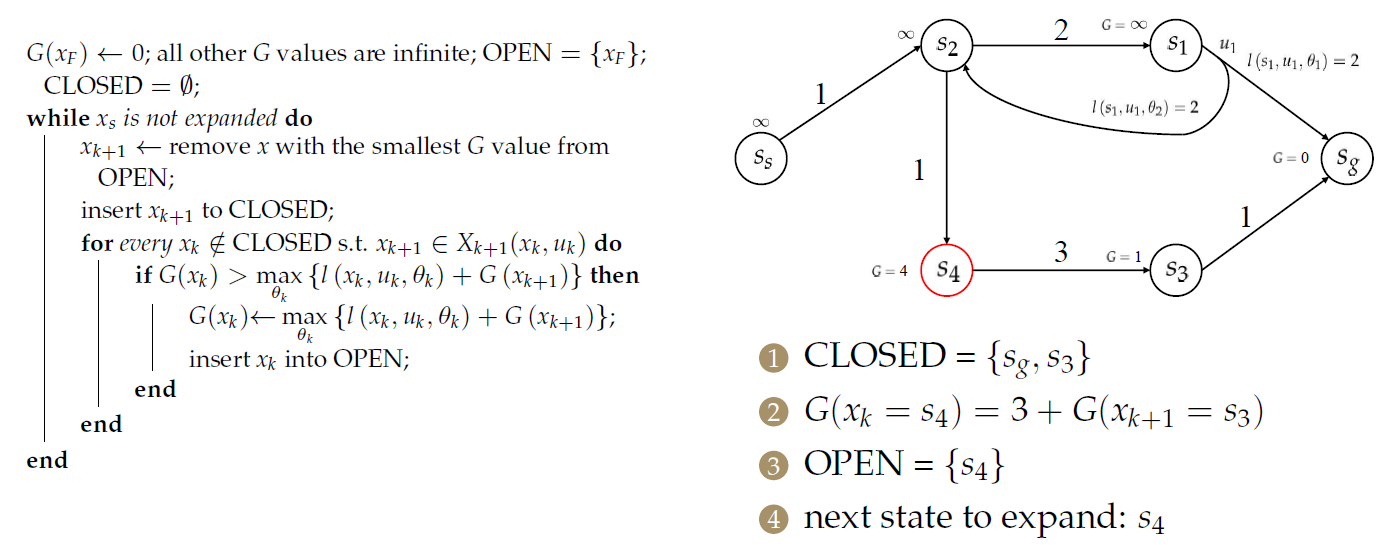
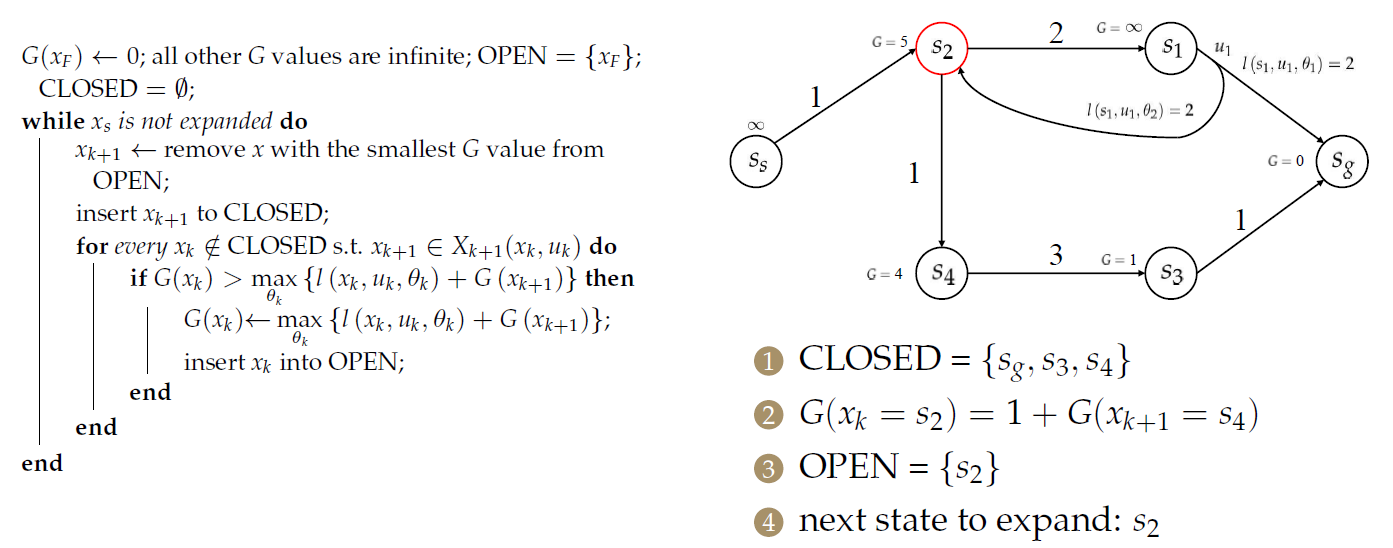
对于\(s_2\),需要处理2个前序节点:
思考
- 如何将算法提高到A*?
- 该算法可以处理失败的情况吗?
例如,陷入循环怎么办? - 如何从中得到最优决策\(\pi^*\)?
只是更新了节点的目标成本,并没有找到最优决策。
Pros and Cons
- 对不确定性的鲁棒性强
- 算法过于悲观(效率难以保证)
- 比普通路径规划更难计算
传统路径规划只需要计算一条path,但含有不确定性的路径规划需要计算一个决策树- 特别是当不确定性Dijkstra或A*不适用时(只适用于可显式构造出graph的问题,不适用于连续性问题),计算更难
- 甚至在不确定性Dijkstra或A*适用时,仍然比使用A*计算单个路径还要昂贵。-为什么?
Expected Cost Planning
递归公式
递归公式:

它有一个特殊的名称,叫做Bellman Optimality Equation。(对于MDP/机器学习领域)
例子
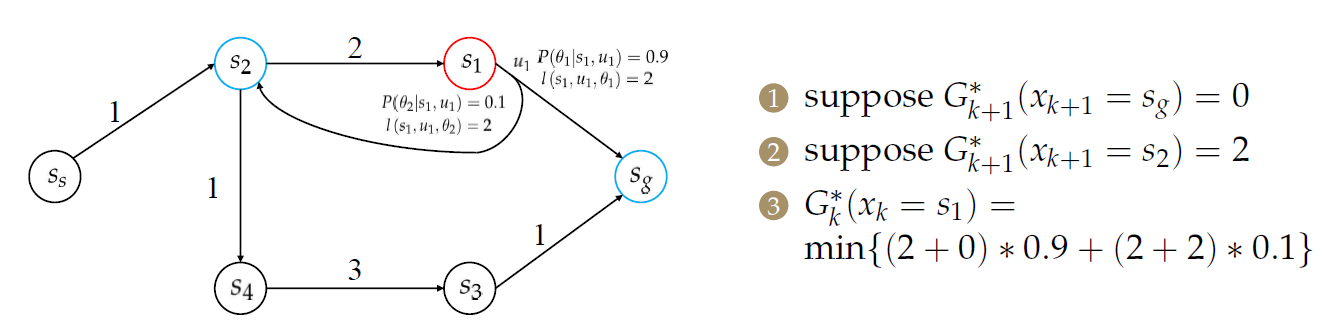
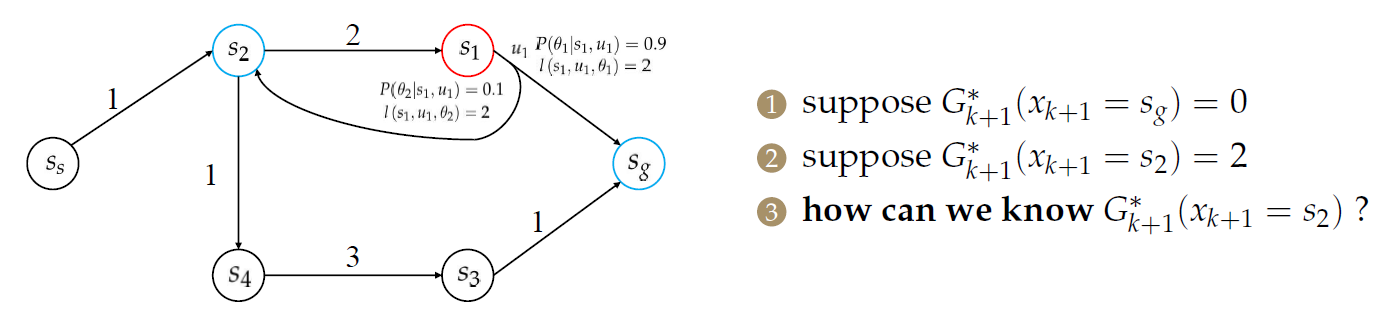
由于存在\(s_1\)到\(s_2\)的回环(导致二者的求解相互依赖),因此我们能否求出\(G^*_{k+1}(x_{k+1}=s_2)\)呢?
怎么解决这种情况?
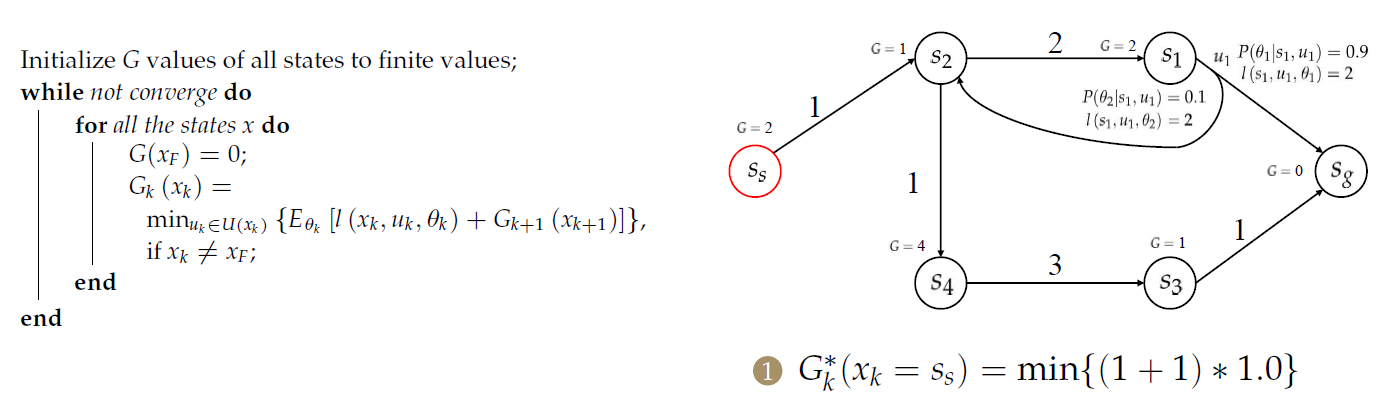
Value Iteration(VI) 值迭代算法
算法概述
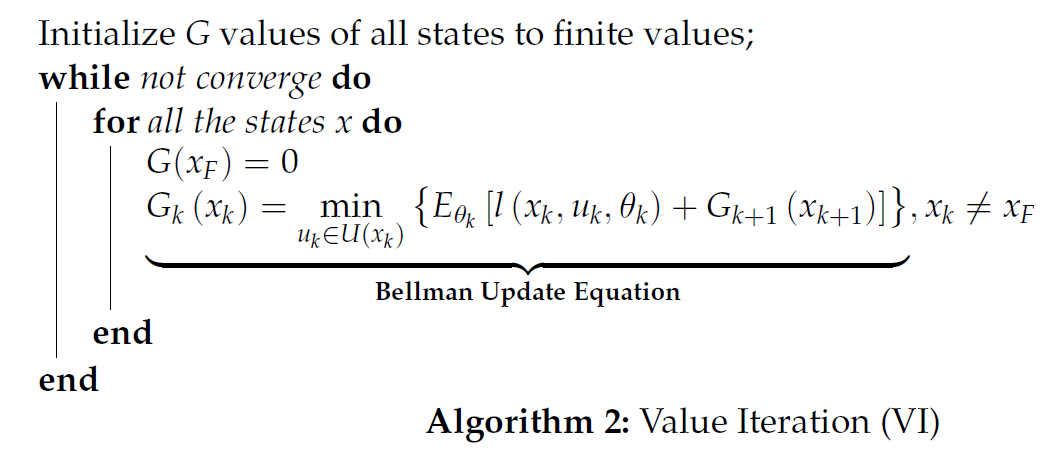
注意与Nondiscrimination的区别是,这里将其初始化为有限值(比较小的值,其值选取影响收敛速度,有很多文献讨论取值方法)
随后运行该算法直到收敛为止。
算法特性
-
通过进行值迭代来获得最佳值。
- 最优性与迭代顺序无关。
- 收敛速度取决于迭代顺序。
-
Bellman更新方程是实现Bellman最佳方程的一种方法。
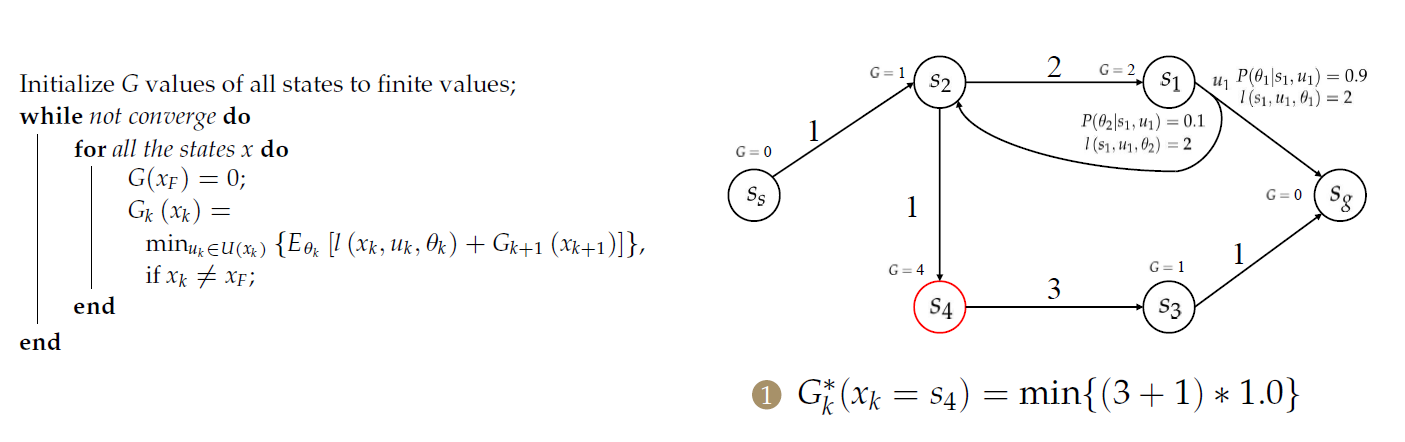
算法示例
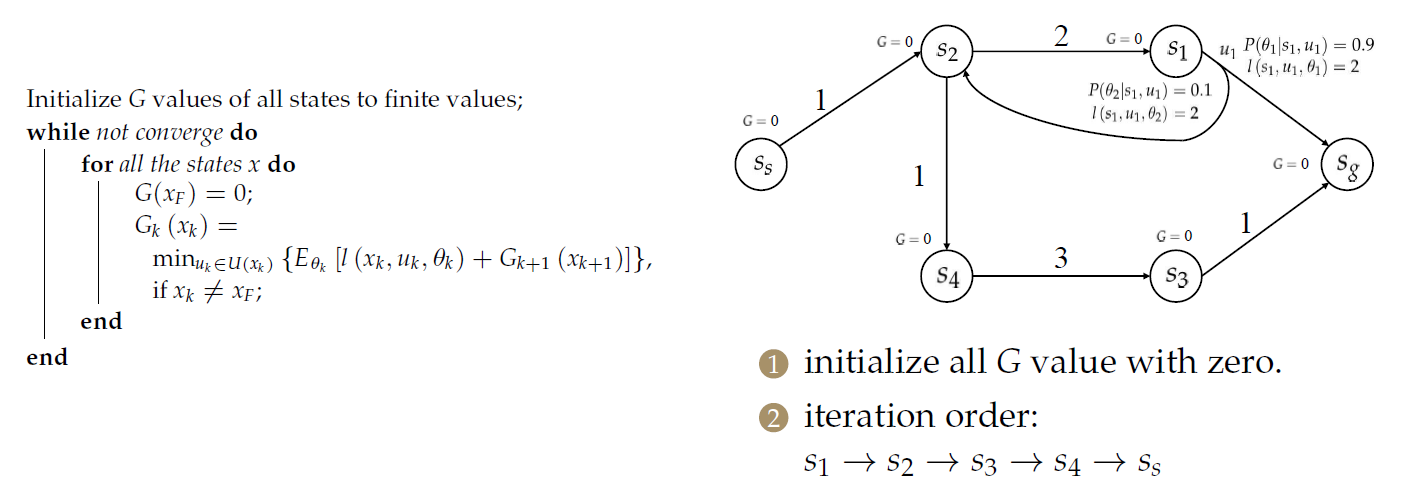
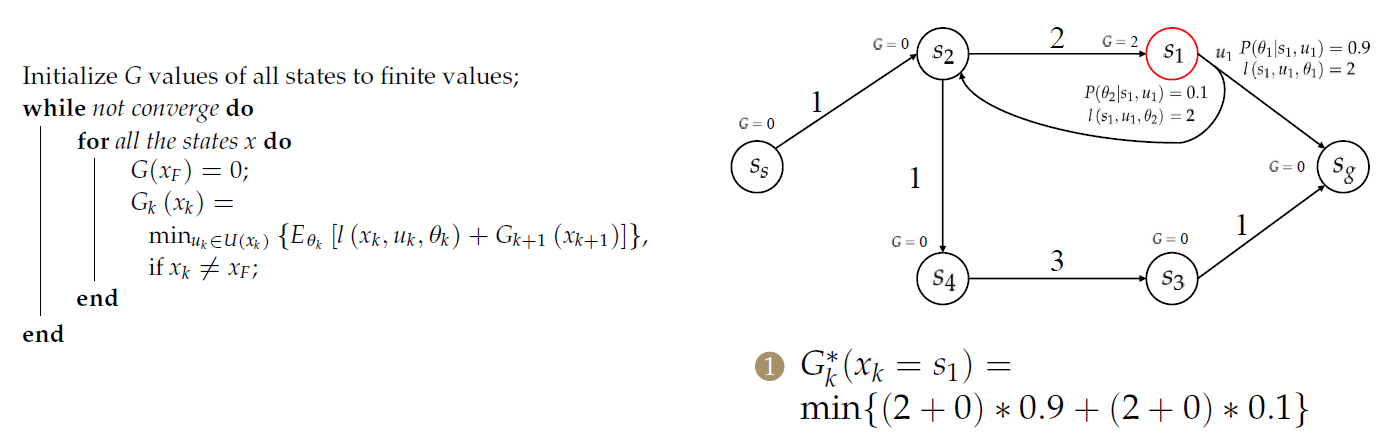
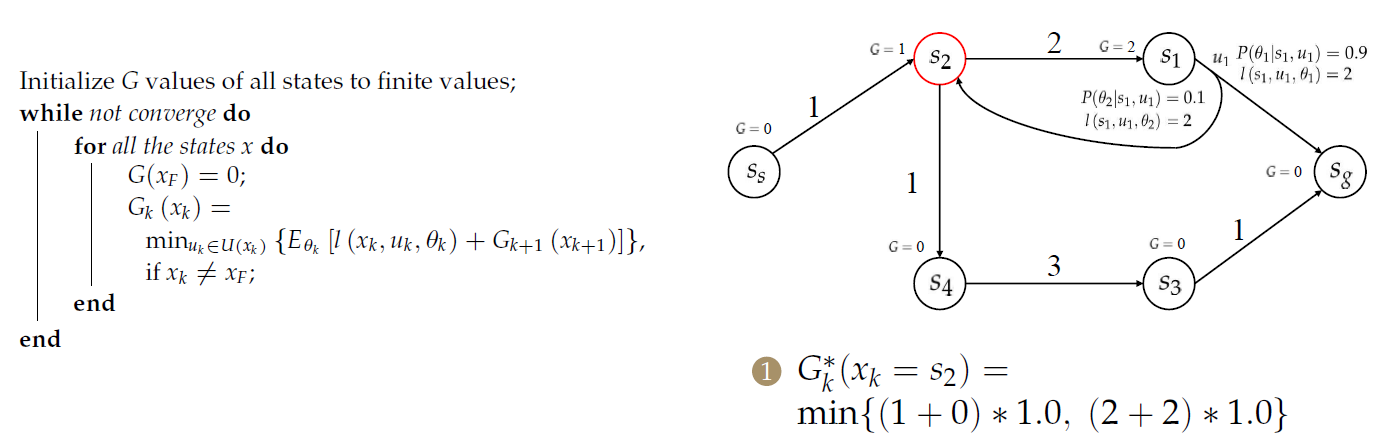
注意\(s_2\)与\(s_1\)情况不同!!!
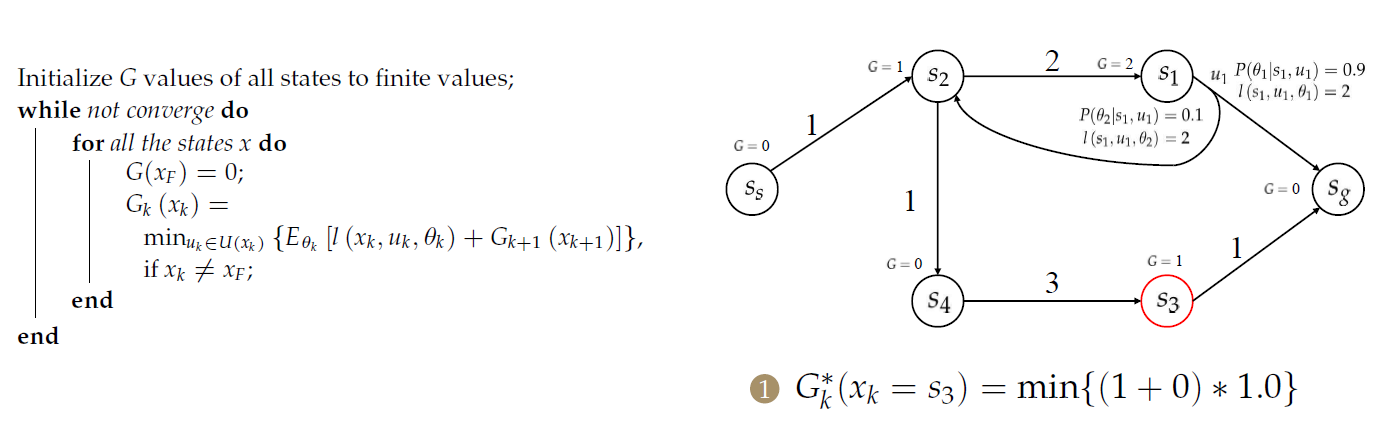
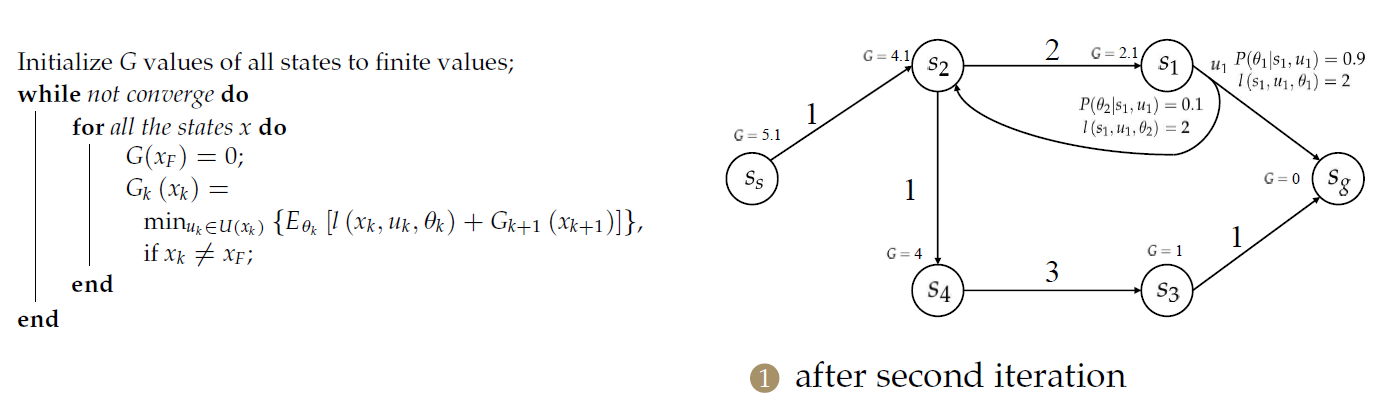
第二次迭代后
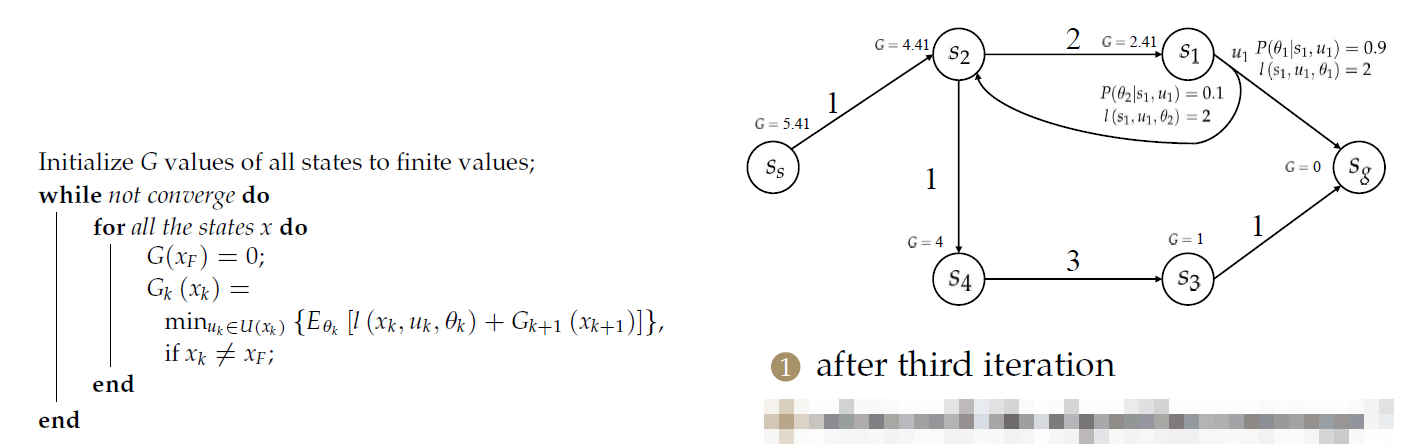
第三次迭代后
思考
- 算法何时收敛?
- 如何改进算法?
- 如何证明收敛?(即通过Bellman更新方程可实现Bellman最佳方程)
- 如何获得最佳的计划\(\pi^*\)?
Pros and Cons
- 概率最优
- 反映平均表现
- 特定的执行可能不是最佳的
- 要求不确定性的分布,即定义自然的行动空间,以及定义其如何依赖于机器人的行动空间的(比较困难,也即建模(用MDP表示现实问题)的困难)
- 比普通路径难计算
- 遍及整个地图(状态)
- 受初始化和迭代顺序的影响
如何优化计算有很多地相应研究。
Real Time Dynamic Programming
这是对上一章中Expected Cost Planning的优化算法。
RTDP算法:
- 将所有状态的\(G\)值初始化为允许值(admissible,与之前介绍的图搜索算法中启发因子类似,要求其不能大于真实值);
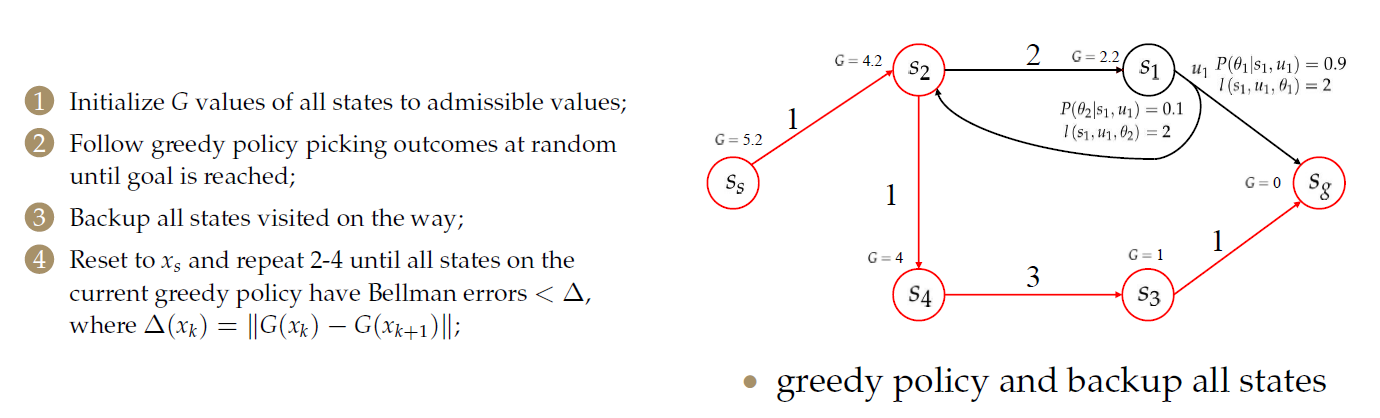
- 按照初始化后的\(G\)值,使用贪婪算法选择一个动作,对于代价相等的,采用随机选取的方法,直到达到目标为止;
- 备份途中访问过的所有状态;
- 重置为\(x_s\)并重复2-4,直到当前贪婪策略的所有状态都具有贝尔曼误差(Bellman error)<\(Delta\),其中\(\Delta(x_k)=||G(x_k)-G_{k+1})||\);注意此处的\(x_k\)和\(x_{k+1}\)是指迭代次数而不是迭代中的节点序号。
优点:
- 是非常有效的替代值迭代算法的方法
- 不计算所有状态的值
- 集中于相关状态的计算
例子:
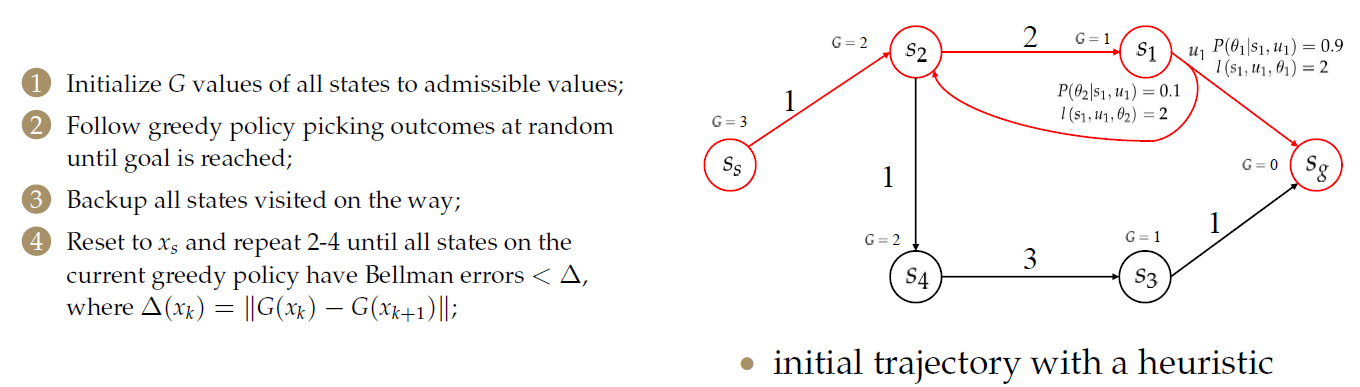
初始化的方法:该点到终点边的数量。
贪婪地选择一个动作,直到到达目标。
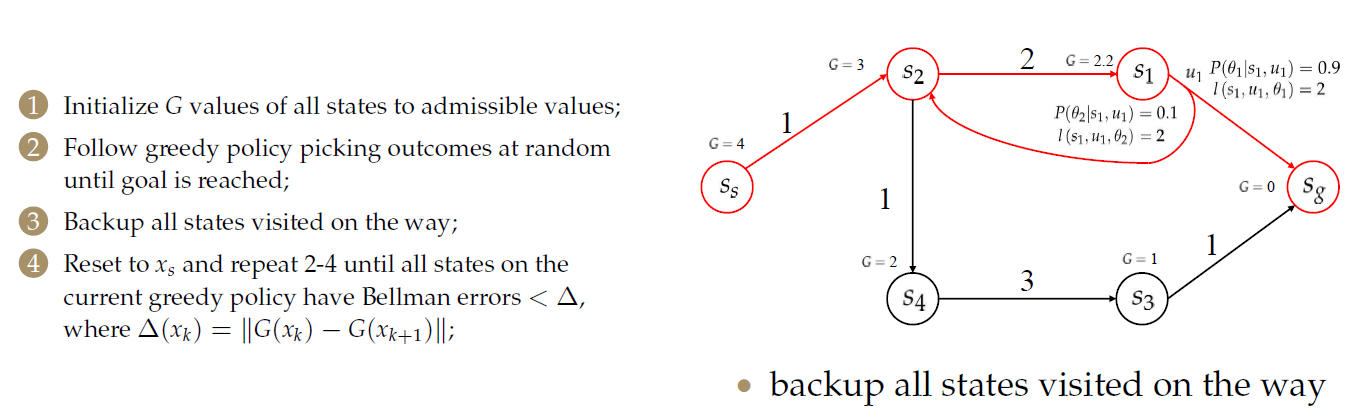
更新\(G\)值。
重新按贪婪的方法选择:
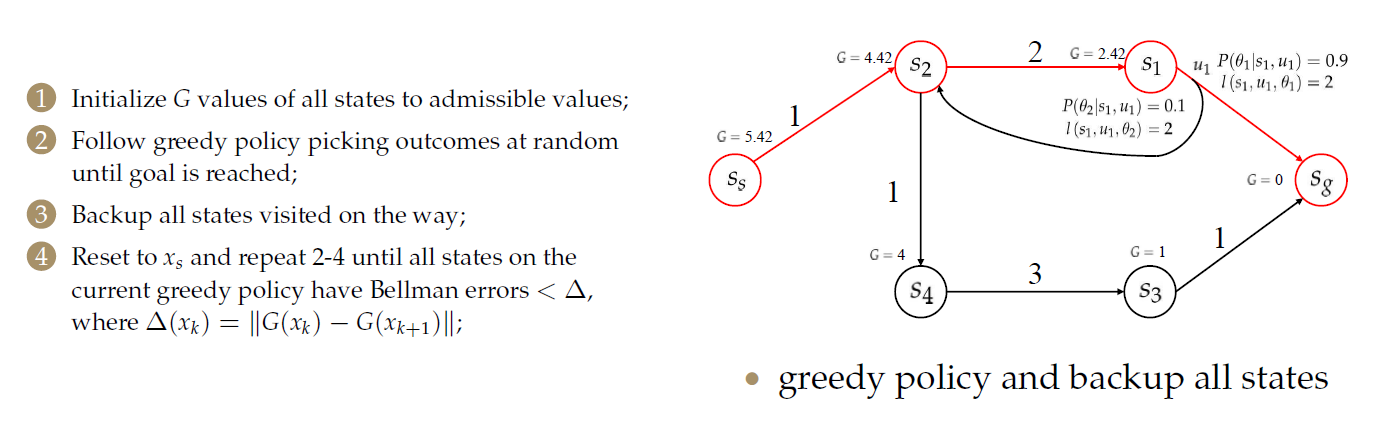
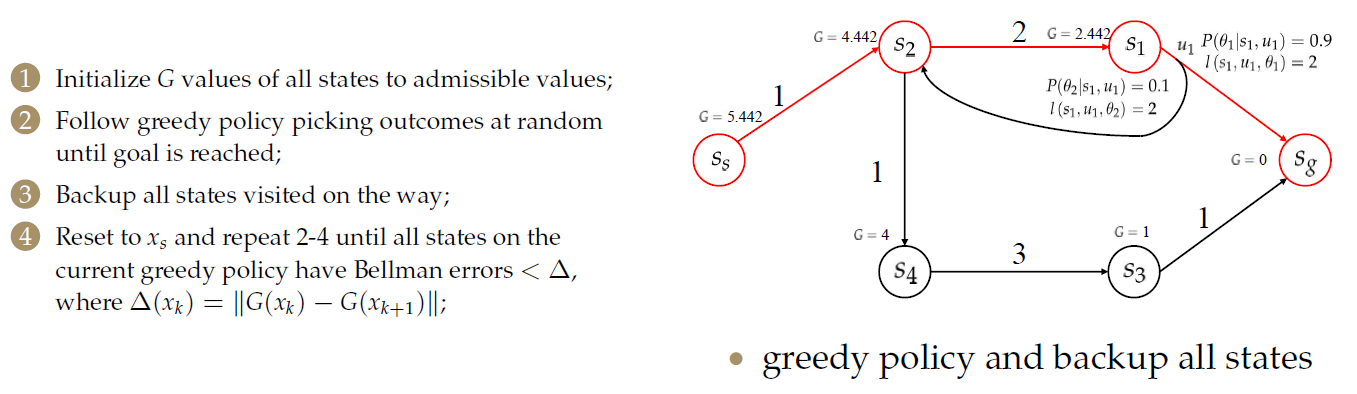
直到满足结束条件。
注意:如果一直按照贪婪的方法选取动作,很可能陷入局部最优或陷入循环,导致不能得到最优结果。
为了解决这一问题,会加入一个随机探索的策略,即有一定的概率去选择非最优的动作。
Exploration & Exploitation问题(MDP/强化学习中的常见问题)
Homework
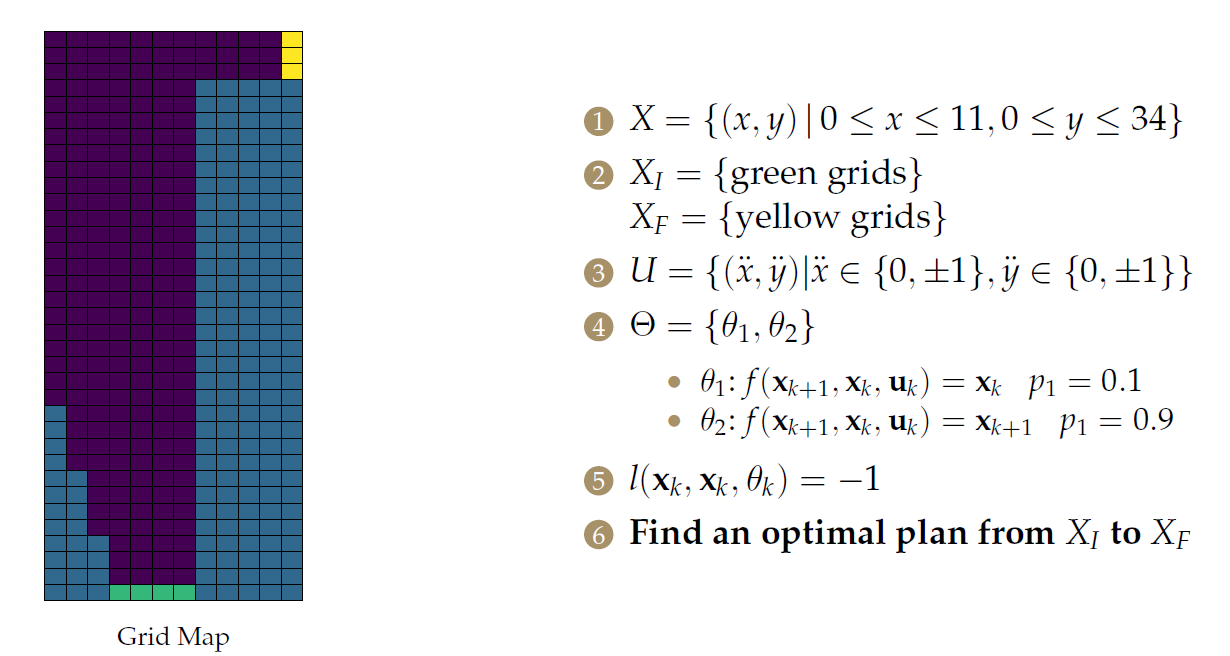
经典赛车问题:紫色为赛道,蓝色为禁止通行区,绿色为起点,黄色是终点。
汽车的行动空间:控制\(x,y\)两方向的加速度。
自然的行动空间:维持原状态(0.1),成功执行(0.9)。【仅考虑了执行的不确定性,未考虑观测的不确定性等】
单步的代价函数:每执行一个动作代价为-1。
- 问题建模
- 如何求解以及求解策略的选择
- 用RTDP算法解决这一问题
根据提供的值迭代的方法实现的代码,换用RTDP方法实现之。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号