差分端接技术比较(以TIA/EIA-422收发为例)
摘要
The purpose of this application report is to remove some of the confusion that may surround signal termination. This discussion will focus attention upon signal termination only as it applies to differential data transmission over twisted pair cable. Common differential signal termination techniques will be presented and the advantages and disadvantages of each will be discussed.
本应用报告的目的是消除可能围绕信号端接的一些困惑。本讨论将集中注意力在信号端接上,因为它适用于双绞线电缆上的差分数据传输。常见的差分信号端接技术将介绍和各自的优点和缺点进行了讨论。
介绍
随着设计向着在更长的传输介质上实现更高的数据传输速率的方向发展,正确的传输线端接变得越来越重要。
本应用报告将讨论差分信号端接技术。每个讨论还将包括由函数发生器组成的设置产生的样本波形,该函数发生器的信号由差分线路驱动器通过双绞线电缆传输,并在远端由差分线路接收器感测。本应用报告将专门介绍以下差分端接选项:
- 无端接
- 串联/反向匹配
- 并联
- 交流
- 电源(故障保护)
- 备用故障保护
- 双向
为了便于讨论,示例中使用流行的TIA/EIA-422驱动器和接收器(如DS26LS31和DS26LS32A)来进一步阐明差分端接。
无端接
选择某种端接方式,往往取决于具体应用要求和成本。最低成本的方式为无端接。
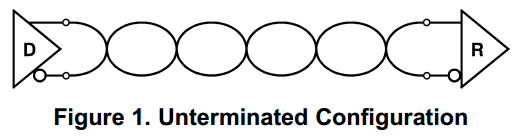
图1,其中DS26LS31差分驱动器和DS26LS32A差分接收器已连接在一起(使用双绞线电缆),没有终端元件。由于没有信号终端元件,DS26LS31驱动器的最坏情况下的负载是DS26LS32A接收器的最小输入电阻【由TIA/EIA-422-A(RS-422)标准确定为4kΩ】。
Pros:
特点1:功耗低。在未端接配置中,DS26LS31 驱动器只需提供极小量的电流,即可将信号驱动至接收器。这种极小的直流电流源要求反过来又将驱动器的芯片功耗降至最低。
特点2:噪声裕量大。此外,4 kΩ 驱动器输出负载可产生较高的驱动器输出摆幅(与驱动器负载 100Ω 相比),从而增加直流噪声裕量。噪声裕量的增加进一步降低了系统噪声引起接收器误切换(improperly switch the receiver,直译:不适当地切换接收器)的可能性。为了避免混淆,噪声裕量的定义是最小驱动器输出摆幅与最大接收器灵敏度之间的差值。另一方面,如果使用符合 TIA/EIA-485 (RS-485)标准的接收器,所产生的噪声裕量会更大。这是因为 RS-485 接收器的最小输入电阻必须大于 12 kΩ,而 RS-422 接收器的最小输入电阻为 4 kΩ。
特点3:开路输入接收器输出已知。DS26LS32A的输入端没有端接元件,这也确保了当传输线路处于空闲或开路状态(取决于接收器)时,接收器输出处于已知的逻辑状态。这种情况通常被称为开路输入接收器故障保护。这种接收器故障保护偏置由接收器正负输入端的内部上拉和下拉电阻确保。例如,当线路空闲(未驱动)时,这些上拉和下拉电阻将输入差分电压(\(V_{ID}\))偏置到大于200 mV的值。
有关接收器故障保护的完整讨论,请参见AN-847差分总线故障保护偏置应用报告(SNLA031)
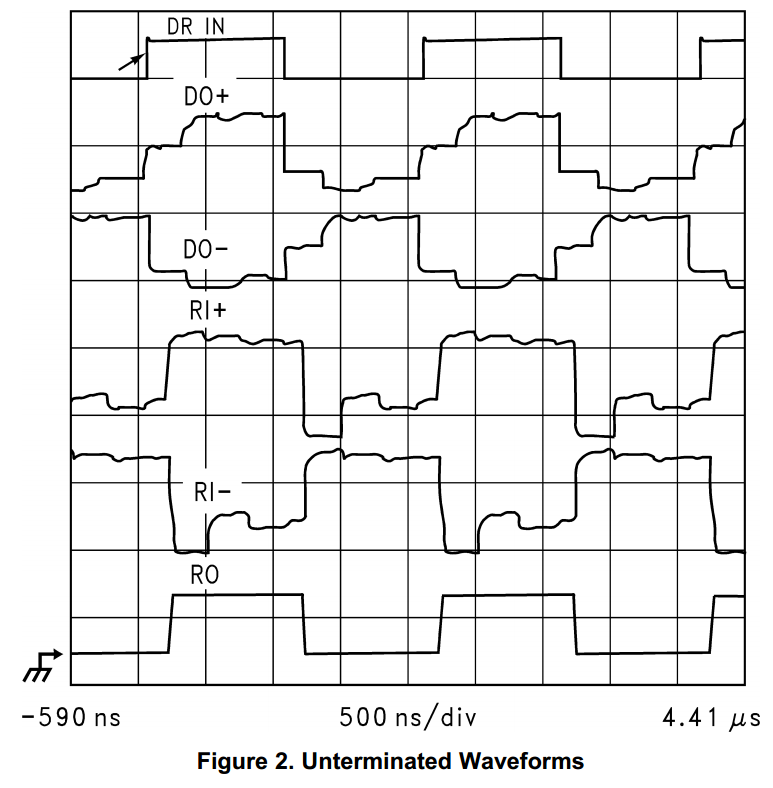
不过,无终端电缆也有一些缺点。无终端数据传输的最大影响是传输线上的信号反射。传输线的基本理论指出,如果向外传播的信号在远端遇到传输线阻抗不匹配的情况,信号就会被反射回信号源。在图 1 中,双绞线的特性阻抗(通常为 100Ω)与 DS26LS32A 的 4 kΩ 输入电阻之间存在失配。结果是信号反射回驱动器。这种反射会在驱动器输出端遇到另一个阻抗失配,进而产生更多反射,反射回接收器,如此循环。最终结果就是在驱动器和接收器之间来回传播大量反射。这些反射可从图 2 中观察到。
Cons:
信号反射严重。从图 2 中可以清楚地看到未端接信号的主要限制。当信号遇到接收器的大输入电阻时会产生正反射。这些反射来回传播,直到经过几次往返电缆延迟后达到稳定状态。延迟是电缆长度和电缆速度的函数。图 2 显示,反射在三次往返后趋于稳定。为了限制这些反射的影响,未端接信号只能用于低数据速率和短传输距离的应用中。
因此,传输的数据在达到这一稳定状态条件之前不应进行任何转换。低数据传输速率可确保反射在下一次信号转换之前有足够的时间沉淀。同时,较短的电缆长度可确保将反射沉降所需的时间保持在最低水平。由于没有端接,数据传输率低,电缆长度短,这可能是无端接方案的最大缺点。
低速一般指信号传输速率低于 200 kbits/秒,或电缆延迟(电信号穿过电缆所需的时间)大大短于比特宽度(单位间隔),或信号上升时间超过电缆单向传播延迟的四倍(即不是传输线)。
一般来说,如果信号上升时间大于电缆传播延迟的四倍,则电缆不再被视为传输线
应该提到的是,大多数差分数据传输应用都提供某种信号端接。这是因为大多数差分应用在相对长的距离上以相对高的传输速率传输数据。在这些类型的应用中,信号端接至关重要。如果应用仅需要在短距离内进行低速操作,则无端接传输线可能是最简单的解决方案。
串联端接
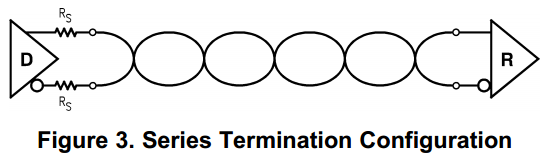
另一种端接方式俗称串联或反向端接。图 3 显示了这种类型的端接。端接电阻 \(R_S\) 的选择应使其值加上驱动器输出的阻抗等于电缆的特性阻抗。现在,当驱动信号沿传输线向下传播时,在电缆远端(接收器输入端)仍然会遇到阻抗失配。但是,当信号传播回驱动器时,反射会在驱动器输出端终止。在驱动信号达到稳定状态之前,只有一次反射。驱动信号达到稳定状态所需的时间仍然取决于信号必须穿过的电缆长度。
与无终端选项一样,由于 4 kΩ 接收器输入电阻带来的轻负载,驱动器功率耗散仍然最小。驱动器负载与未终止方案相比没有变化。在这两种情况下,驱动器都有效负载了接收器的输入阻抗。直流噪声裕量再次增加,空闲和线路开路条件下仍支持开路输入接收器故障安全功能。
Cons:
使用串联终端有三大缺点。
1.更换驱动器可能需要更改端接电阻。首先,由于正常的工艺变化,不同制造商和不同驱动器负载的驱动器输出阻抗可能不同。如果出现更换线路驱动器的问题,设计人员可能需要重新制作电路板,以确保 \(R_S\) 与新驱动器的输出阻抗相匹配。
2.串联终端通常仅限于点对点应用。请看下面的例子。如果第二个接收器(多路应用)位于电缆远端的驱动器和接收器之间的中间位置,则中间接收器看到的噪声裕度将在入射信号和反射信号之间发生变化【为什么?】。在点对点应用中,只有一个接收器与一个驱动器配合使用,就不会出现这样的问题。
3.接收器输入端仍存在阻抗失配。同样,这种失配是由于信号在 100Ω 电缆上传播时突然遇到 4 kΩ 的接收器输入电阻造成的。如图 4 所示,这种阻抗失配将继续导致传输线上的反射。
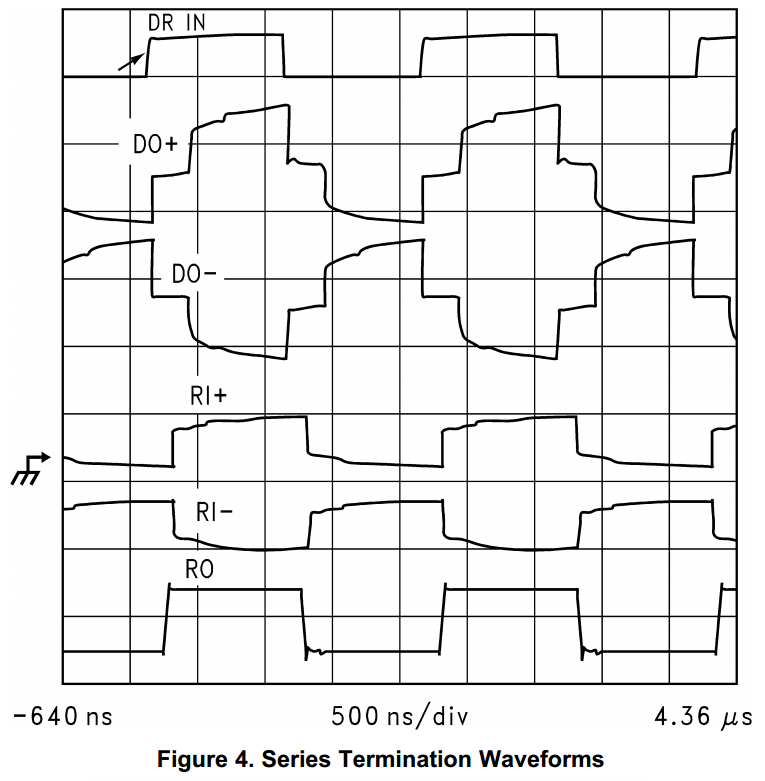
请注意,当驱动信号在接收器输入端遇到阻抗失配时会产生反射。反射信号传播回驱动器,并在一定程度上被驱动器的输出阻抗所终止。反射信号被终止的原因是串联电阻(\(R_S\))和驱动器输出阻抗的组合阻抗接近于匹配电缆的特性阻抗。与图 2 中未终止的信号波形相比,图 4 中的波形只有一次反射。
信号反射回信号源总共需要一次往返电缆延迟。由于所有反射都应在下一次数据转换之前平息(以保持数据的完整性),因此必须将往返电缆延迟保持在远小于时间单位间隔(TUI 定义为最小比特宽度或信号转换之间的 "距离")。换句话说,串联终端应仅限于电缆长度较短(以尽量减少往返电缆延迟)、数据速率较低(以尽量增大 TUI)的应用。另外,从成本角度考虑,串联终端可能不是理想的选择,因为它需要两个额外的外部元件。
并联端接
并联终端可以说是当今最普遍的终端方案之一。与串联终端方案不同,并联终端在传输线远端(接收器)的差分线路上使用一个电阻器来消除所有反射。见图 5。
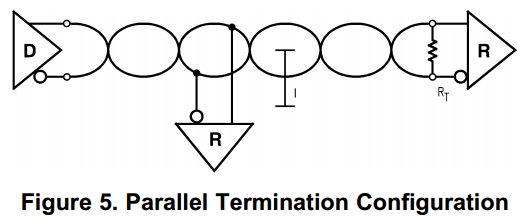
要消除所有反射,就必须选择与传输线特性阻抗(\(Z_O\))相匹配的 \(R_T\)。但一般来说,选择 \(R_T\) 时最好使其略大于 \(Z_O\)。过端接往往比欠端接更可取,因为据观察,过端接可改善信号质量。\(R_T\) 通常选择为等于 \(Z_O\)。使用过端接时,\(R_T\) 通常比 \(Z_O\) 大 10%。
消除反射可在更长的电缆长度上实现更高的数据传输速率。但请记住,数据传输率与电缆长度之间存在反比关系。也就是说,数据传输率越高,电缆越短;反之,数据传输率越低,电缆越长。较高的数据传输率和较长的电缆长度会简单地转化为较小的 TUI 和较长的电缆延迟。
Pros:
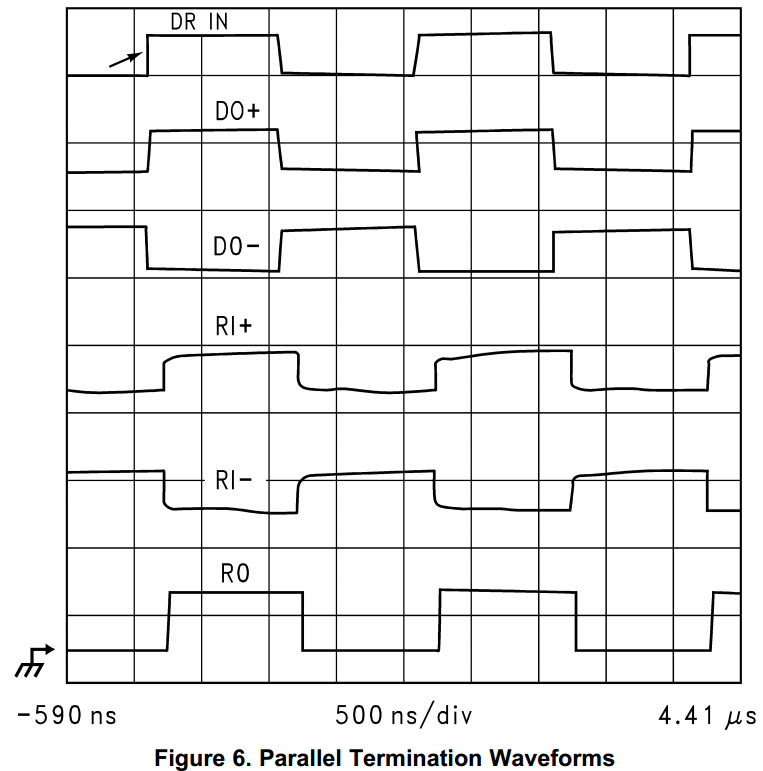
1.消除反射。与串联端接不同,串联端接的高数据传输率和长电缆长度会对数据完整性产生负面影响,而并联端接则能有效消除所有反射,从而消除反射干扰数据转换的所有顾虑。如图 6 所示,驱动器输出和接收器输入信号均无反射。这样的结果使并行端接成为高速(10 Mb/s)或长电缆(最长 4000 英尺)应用的最佳选择。
2.既支持点对点应用,也支持多点应用。根据 TIA/EIA-422 标准的定义,多路传输是指由一个驱动器和多达十个沿电缆分布的接收器组成的分配系统。并行终端位于电缆的远端(驱动器对面),可有效地在该位置终止信号,防止反射。
Cons:
并行端接也有缺点。让我们来看看这些与多路传输配置有关的缺点。
1.菊花链中短桩长度引起的阻抗失配和反射。多路传输操作的一个固有假设是,图 5 中用 "I "测量的短桩长度(stub length,一个PCB概念)应最小化。尽管所有接收器都通过 \(R_T\) 有效端接,但过长的短桩长度会再次引起阻抗失配和反射。因此,尽管并联终端可以消除反射并允许多路配置,但它确实对与这些其他接收器相关的短桩长度造成了限制。通常情况下,短桩长度应小于驱动器上升时间的 1/4,以尽量减少传输线效应和反射。
2.大幅增加耗散功率。TIA/EIA-422-A 标准确实建议在差分线路并联端接时使用 100Ω 电阻器。因此,使用 DS26LS31 或 DS26C31 等 TIA/EIA-422-A 驱动器的应用通常在双绞线的远端使用 100Ω 端接。虽然 100Ω 并联端接可消除所有反射,但增加该电阻后,驱动器的耗散功率将大幅增加。驱动器功耗的增加是并联终端的一个主要缺点。对于未端接和串联端接的驱动器,由于没有这个端接电阻,驱动器功率耗散较低,这也是这两种端接选项的主要优点。
3.噪声容限也将随着并行端接而降低。无端接和串联端接驱动器的负载相对较轻(4 kΩ),导致驱动器输出摆幅较大。并联端接带来的较大驱动器负载(通常为100Ω)会降低驱动器的输出信号摆幅。然而,即使有这种降低,仍然有足够的噪声容限来确保接收器不会不正确地切换。
回想一下前面关于无终端和串联选项的接收器故障安全的讨论。在这两种情况下,由于内部电路(取决于接收器)将差分输入电压(\(V{ID}\))偏置到大于其差分阈值的值,从而确保了开路输入接收器的故障安全操作。由于接收器输入端产生的偏置电压(\(V{ID}\))大于 +200 mV,因此 DS26LS32A 接收器的输出保持稳定的高电平状态。
4.无法保证开路输入接收器故障安全。与非端接和串联选项不同,并联端接无法在传输线处于空闲状态时支持开路输入接收器故障安全。并行端接的这一缺点将在后面介绍电源和备用故障安全端接的章节中详细讨论。
有关接收器故障保护的完整讨论,请参见AN-847差分总线故障保护偏置应用报告(SNLA031)
交流终端
并联终端的效果往往会因驱动器功耗增加和接收器故障安全问题而受到影响。端接电阻 \(R_T\)(见图 5)所需的直流环路电流通常过大,无法用于注重功耗的应用或很少开关的控制线路。在异步应用中,并联终端无法确保空闲总线状态下的接收器故障安全,这反过来又使系统容易受到错误(如错误启动位和成帧错误)的影响。然而,采用交流端接的主要原因是,需要以最小的直流环路电流实现有效的传输线端接。
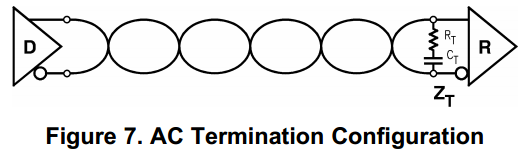
\(R_T\) 的值一般为 100Ω-150Ω(取决于电缆的 \(Z_O\)),其选择应与电缆的特性阻抗 (\(Z_O\)) 相匹配。另一方面,\(C_T\) 的选择应等于电缆的往返延迟除以电缆的 \(Z_O\)。
给出一个例子:
- 电缆长度 = 100 英尺(30.48 米)
- 速度 = 1.7 纳秒/英尺 (对多种线缆测量的结果表明, 平均传播延迟为1.7纳秒每英尺)
- 阻抗 = 100Ω
因此,\(C_T\) ≤ (100 ft × 2 × 1.7 ns / ft) / 100 Ω 即 ≤ 3,400 pF
此外,由此产生的 RC 时间常数应小于或等于单位间隔 (TUI) 的 10%。因此,在所提供的示例中,最大开关速率应小于 300 kHz。现在,这种端接在转换过程中应表现得像并联端接,但在稳态条件下会产生更大的噪声裕量。参见图 8。
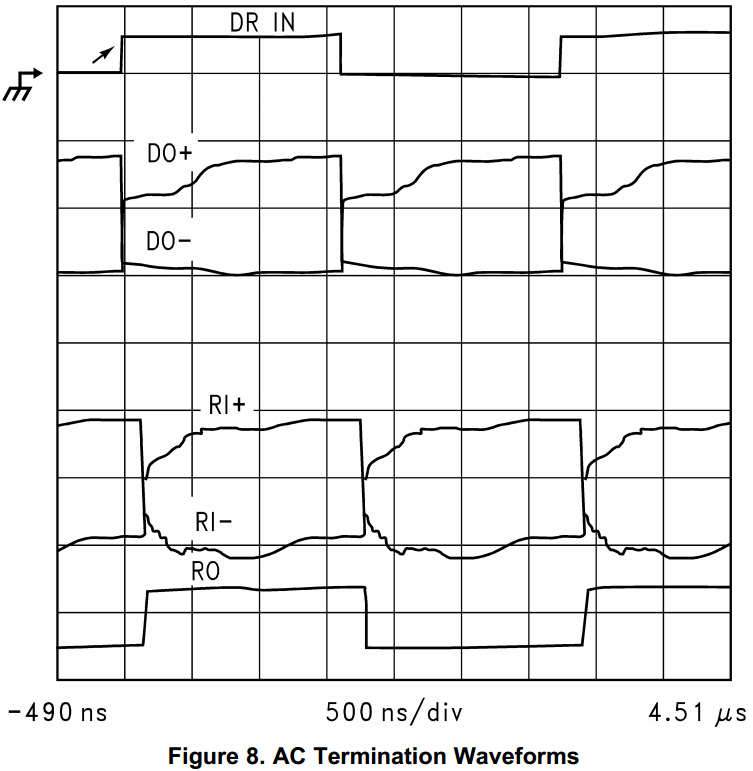
图 8 说明了并行端接信号与非端接信号之间的权衡。图中没有大的反射,驱动器功率耗散降低,但低通滤波器效应却牺牲了,这从根本上限制了交流端接在低速控制线上的应用。请注意,图 8 中驱动信号的频率为 300 kHz,而其他图表中的频率为 500 kHz。这样做是为了保持比特时间与 RC 时间常数之间的比率。RS-422-A 的修订草案将包括交流端接,以替代并联端接。
图 8 中的波形应结合以下关于交流终止工作原理的简要说明一并阅读。当驱动信号从一个逻辑状态转换到另一个逻辑状态时,电容器 \(C_T\) 会表现为短路,因此,呈现给驱动器的负载基本上是 \(R_T\)。但是,一旦驱动信号达到预期电平(逻辑高电平或逻辑低电平),\(C_T\) 就会表现为开路。此时,直流环路电流被阻断。驱动器的功率耗散随之降低。驱动器的负载也会随之降低。这是因为驱动器现在负载的接收器输入电阻较大,通常大于 4 kΩ,而典型的 \(R_T\) 为 100Ω-120Ω。这种负载减小的情况增加了驱动器的信号摆幅,从而提高了噪声裕度。空闲总线状态也迫使 \(C_T\) 进入开路模式。一旦出现这种情况,接收器的内部上拉和下拉电阻器就会将输出偏置为已知状态。因此,除了最大限度地减少直流环路电流、防止线路反射和增加噪声裕度外,交流端接还支持开路输入接收器故障安全。
与前面讨论的所有终端选项一样,使用交流终端也有缺点。交流端接会对驱动信号产生低通滤波器效应,从而限制应用的最大数据传输速率。这种数据速率限制是 \(R_T\) 和 \(C_T\) 共同影响驱动信号上升时间的结果。数据传输率受限的程度取决于 \(R_T\) 和 \(C_T\) 的选择。长 RC 时间常数会对驱动信号的最大数据传输速率产生较大影响,反之亦然。由于这些数据传输速率限制,最适合交流终止的传输线路通常是低速控制线路,这些线路需要的是电平灵敏度而不是边缘灵敏度。最后,交流端接所需的零件数量会使其在注重成本的应用中处于劣势。
电源端接
交流端接主要是为了消除并联端接固有的大直流环路电流。而电源端接则解决了并联端接无法在空闲总线状态下支持接收器故障安全的问题。使用电源选项终止的传输线路示意图见图 9。
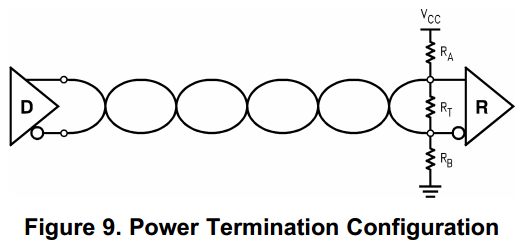
总线空闲时,缺失 \(R_A\) 和 \(R_B\) 时,很难保证接收器的输出处于已知状态。这是由于接收器内部的高阻值上拉和下拉电阻导致 \(R_T\) 两端的电压不足(约为 1 mV-5 mV)。这些内部上拉和下拉电阻的存在将确保接收器仅在输入开路的情况下发生故障。为了将接收器切换到逻辑高电平状态,无论总线是开路还是空闲,\(R_T\) 上都必须产生至少 +200 mV 的电压(相对于反相接收器输入)。因此,\(R_A\) 和 \(R_B\) 的唯一目的就是建立一个分压器,使 \(R_T\) 上至少降下 +200 mV。
有关电阻值(\(R_A\) 和 \(R_B\))选择标准的完整解释,请参阅AN-847差分总线故障保护偏置应用报告(SNLA031)
不过,增加外部接收器故障安全偏置电阻确实会带来一些问题。主要缺点是增加 \(R_A\) 和 \(R_B\) 后,驱动器负载会增加。驱动器负载的增加会降低驱动器的输出摆幅,进而降低噪声裕度。由于驱动器必须提供外部故障安全网络所需的额外电流,因此驱动器功率耗散也会增加。最后一个问题是,在某些应用中,两个额外电阻器(不包括 \(R_T\))的额外成本和后续处理可能会超过电源端接的优势。
交替故障安全端接
这种失效保护终端基本上是电源终端的延伸。RC 和 RD 的加入大大增强了接收机在更恶劣环境中工作的能力。
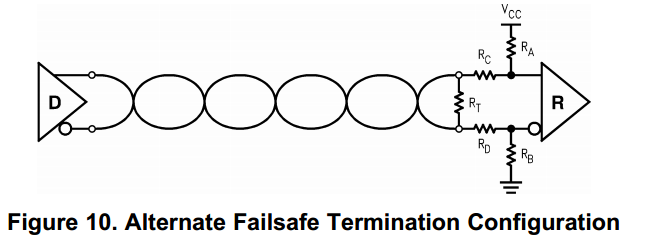
这种故障安全终端的优势直接体现在更高的坚固性上。使用故障安全选项端接的输电线路可以承受更大的共模电压。对 RC 和 RD 的精心选择将决定线路能承受多大的共模电压。这是因为 RC 和 RD 在接收器输入电阻之间起着分压器的作用。TIA/ElA-422-A 标准允许高达 7V 幅值的共模偏移,但大多数集成电路支持超过 ±7V 限制的绝对最大额定值。DS26LS32A 支持 ±25V ABS MAX 输入额定值。精心选择电阻器可使电缆上的共模电压在 35V-45V 范围内,同时仍遵守接收器输入引脚的 25V 限制。RC 和 RD 通常为 4.7 kΩ,而 RA 和 RB 为 47 kΩ。这就在接收器输入引脚之间提供了 9.5 kΩ,还允许将上拉和下拉电阻器的值增加到 47 kΩ。这种功能非常适合工厂控制和楼宇间数据传输等应用,在这些应用中,共模范围偶尔会超过 ±7V。
失效保护端接还能确保接收机在线路开路、空闲和短路情况下的失效保护。在讨论的所有端接选项中,故障安全选项是唯一能确保接收器在差分线路短路时故障安全的选项。将差分线路短路在一起只是将 RT 短路。在这种短路情况下,接收器的输入端仍将看到 RC 和 RD 的串联组合。因此,仍可支持接收器故障安全。刚才描述的短路条件产生了故障安全终止的另一个好处。由于增加了 RC 和 RD,VCC 与地之间的阻抗增加,从而提高了故障或短路电流限制。
虽然RC和RD的增加提高了传输线承受更大共模电压的能力,但它也可能对接收器的灵敏度产生负面影响。例如,考虑TIA/EIA-422接收器。切换接收器所需的最小差分输入信号(VID)通常为|200 MV|. 根据RC和RD的值,可能需要在RT两端形成最小+400 mV,以确保接收器输入端子两端至少有200 mV。故障保护端接的另一个显著缺点可能是实现它所需的电阻器数量。每条线路五个电阻器可能证明成本太高。
双向端接
我们将要讨论的最后一种终端类型称为双向终端。图 11 显示了一个由驱动器、接收器和收发器组成的典型多点应用。双向终端是更进一步的并行终端。双向终端现在允许将多个驱动器(多点配置)连接到同一双绞线上。多个驱动器连接到同一双绞线后,数据现在可以双向传输。但请注意,虽然现在可以双向传输数据,但只允许半双工传输(根据 TIA/EIA-485 标准的规定)。多个 TlA/EIA-485 驱动器不能同时驱动线路,因为这将导致线路争用。值得一提的是,应仔细检查系统定时,以确保不会发生线路争用。使用双向终端的优点与并行终端几乎相同。
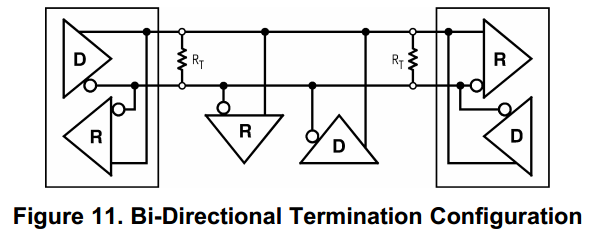
这些优点包括防止信号反射,以及能够以高数据速率驱动长传输线。与并行端接一样,RT 的选择应与双绞线的特性阻抗 (ZO) 匹配。
使用并行终端的缺点也同样适用于双向终端。由于 RT 与接收器开路故障安全网络之间的相互作用,无法确保接收器故障安全。必须最大限度地减少线桩长度,并在线路的两端各放置一个 RT,以最大限度地减少传输线效应。但是,如果在电缆两端放置两个终端电阻,驱动器的有效负载就会增加 60Ω(因为 RT 通常为 120Ω)。使用双向终端时,驱动器负载的这种 "加倍 "会产生两种影响。首先,它对驱动器的电流源能力提出了更高的要求。如上所述,多点驱动器的电流源能力必须约为多路驱动器的两倍。要满足这一增加的电流需求,驱动器的功率耗散自然会更大。其次,由于驱动器的输出电平会随着负载的增加而降低,因此噪声裕度也会降低。
结论
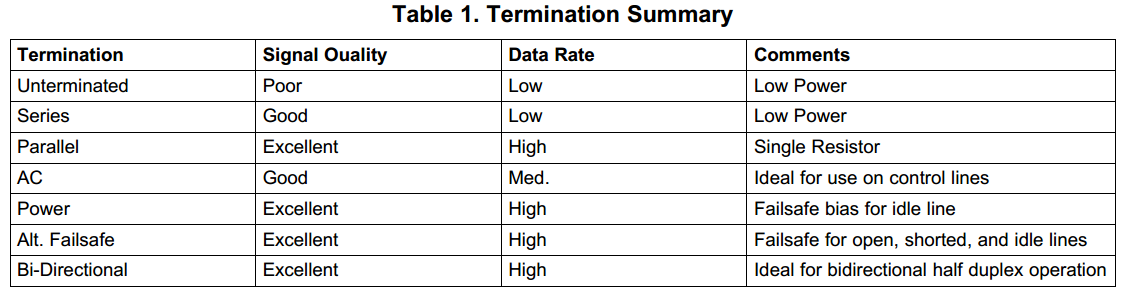
对比了无终端线路和串联、并联、交流、电源、故障安全和双向终端线路的优缺点。现在应该清楚,没有一种端接方案适合所有应用。表 1 概述了本应用报告中讨论的差分端接方案。
所使用的终端方案主要取决于系统的需求。具体来说,终端的选择取决于系统的数据传输要求。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号