

Camera基础知识
camera模组组成:
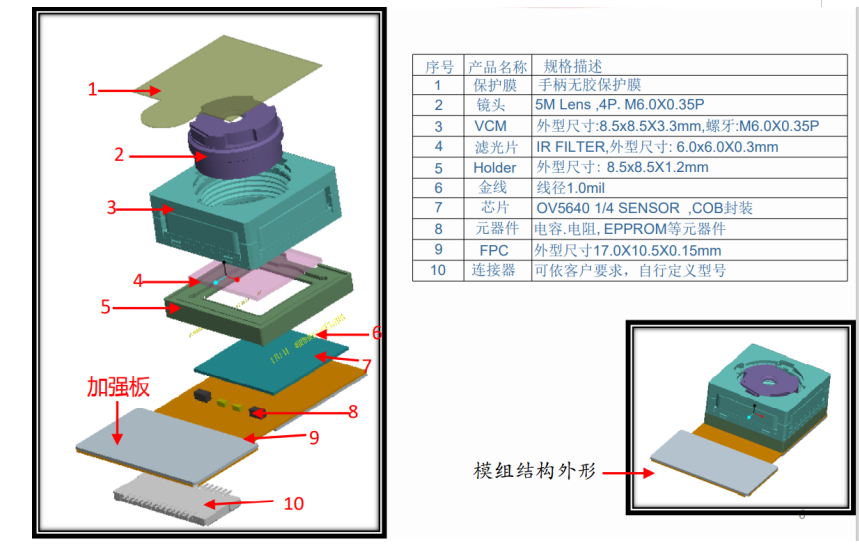
保护膜:适用于对与镜头的保护,防止镜头出现灰尘或者污渍,以及防止镜头镜片出现划痕。
镜头:主要作用是聚集光线,并将光线折射到传感器上
马达(VCM):通过移动镜头来实现光学变焦
IR滤光片:人眼感测器只能检测到波长介于400nm至700nm之间的可见光,IR滤光片就是用来避掉户外的红外线的光线,避免画面整个偏红,常用的IR有两种:1:普通的IR玻璃;2:蓝玻璃。
镜座(Holder):Holder是镜头的支撑体,目的是为了遮光和密封。Holder的材料一般会使用PC,ABS,LCP或PA46/66等塑胶料。重点是控制Holder的Particle状况
金线:用于连接sensor和FPC
芯片(sensor):感光元件,通过将光信号转变为电信号,最后将电信号换为数字信号生成图像数据。
元器件:用于搭建电路
FPC:与连接器一起完成camera单体内部相关器件与手机主板之间的信号导通。
部分camera模组还会有马达,IR滤光片等部件。
镜头参数
镜头的参数主要分为:焦距、FOV(视场角)、光圈、色差/球差/慧差、景深、畸变等。
1、焦距
对于薄透镜而言,焦距是指从透镜中心到透镜焦点的距离。焦距与放大倍数成正比。镜头的焦距可以确定当前镜头可以清晰成像的距离。其计算公式为:

2、FOV(视场角)
视场角是指镜头成像所能覆盖的范围,是由焦距和sensor尺寸决定的:镜头焦距越短,视场角越大;sensor尺寸越大,视场角越大。
3、光圈
光圈值越大,代表光圈越小,景深越大。光圈代表了镜头的进光量,和光学显微镜的光圈作用相同,当光圈越大时,进光量越大,图像就更亮,反之图像更暗。
F.NO=f(焦距)/D(光圈直径)

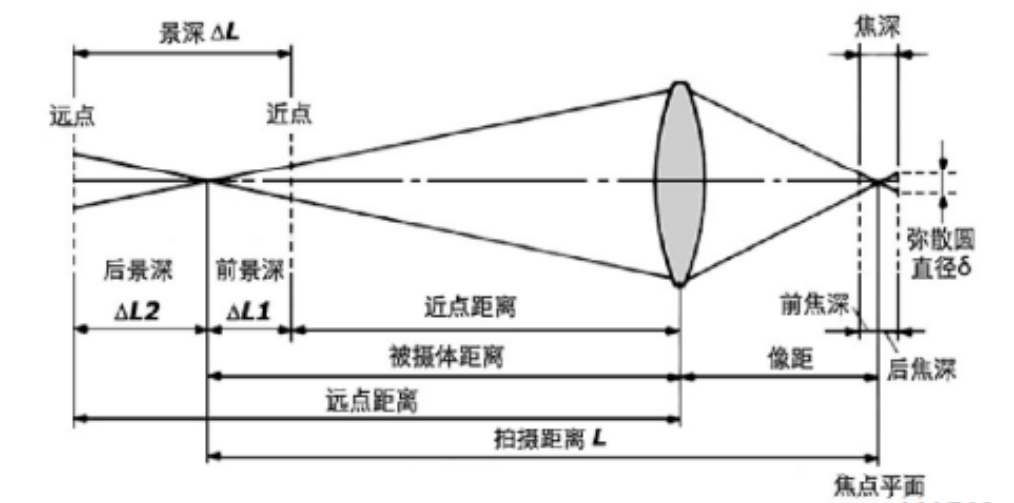
4、景深
景深DOF:Depth of Field,当焦点对准某一点时,其前后都仍可清晰的范围。
镜头的景深是由光圈、焦距、拍摄主体距离一起决定。
光圈越大,景深越小;光圈越小,景深越大;
镜头焦距越长,景深越小;反之景深越大;
拍摄主体越近(对焦点越近),景深越小;拍摄主体越远(对焦点越远),景深越大
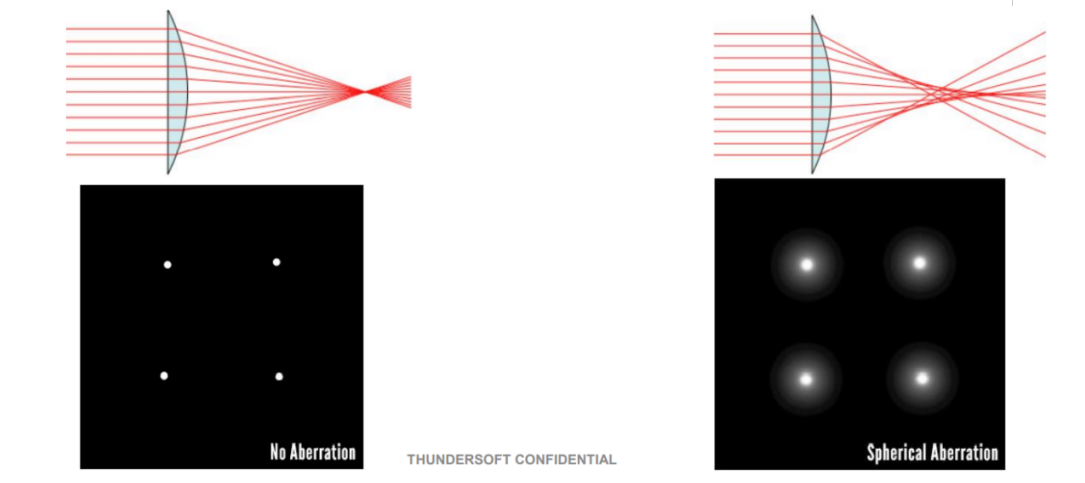
5、色差/球差/慧差
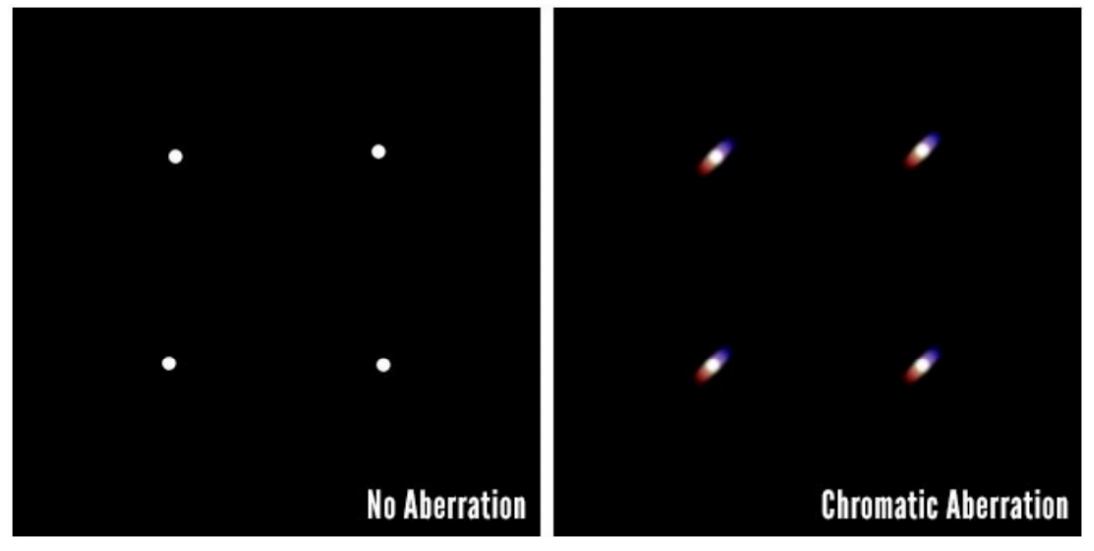
色差是指透镜无法将不同波长的光聚焦到同一点上。色差产生的原因是同一光学玻璃对不同波长的 光线的折射率不同。
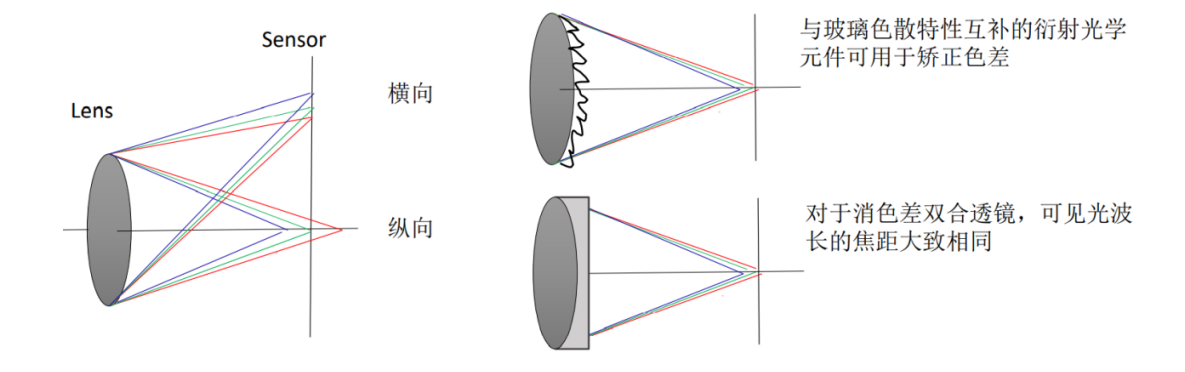
色差的出现会导致成像出现彩色的虚影,影响图像的质量,如下图:
6、球差
是一种光学系统中使用球面元件的像差。由主轴上某一物点向光学系统发出的单色圆锥形光束, 经该光学系列折射后,若原光束不同孔径角的各光线,不能交于主轴上的同一位置,以至在主轴上的 理想像平面处,形成一弥散光斑,则此光学系统的成像误差称为球差。
由位于主轴外的某一轴外物点,向光学系统发出的单色圆锥形光束,经该光学系列折射后,若在理想像 平面处不能结成清晰点,而是结成拖着明亮尾巴的慧星形光斑,则此光学系统的成像误差称为慧差。
7、畸变
畸变是之放大率随视场角增大而变化引起一种失去物像相似的相差,只会影响成像的形状而不会影响成像的清晰度。
畸变由分为枕形畸变和桶形畸变,枕形畸变通常是由短焦镜头导致,而桶形畸变通常有长焦镜头导致。

Autator
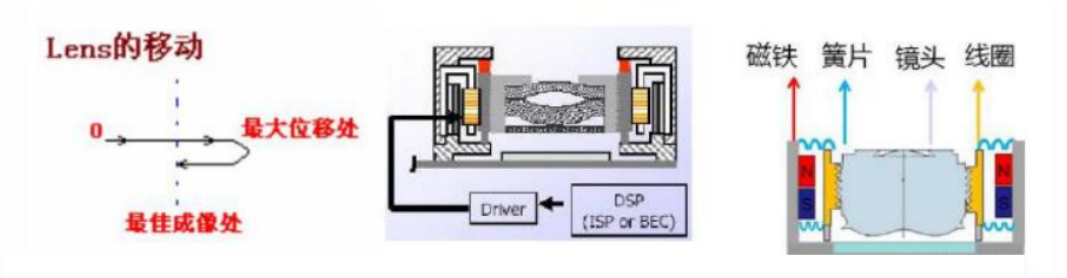
原理是在holder内有一个小型的强力磁场,通过driver IC来控制VCM内部线圈的电流二产 生磁场力,从而带动中间的lens,而形成自动变焦的效果。
手机相机常用的用的CCM马达是VCM(Voice Coil Motor)通过微距离移动整个镜头,改变焦距,实现清 晰影像。AF距离=I2-I1
其内部结构如下图:
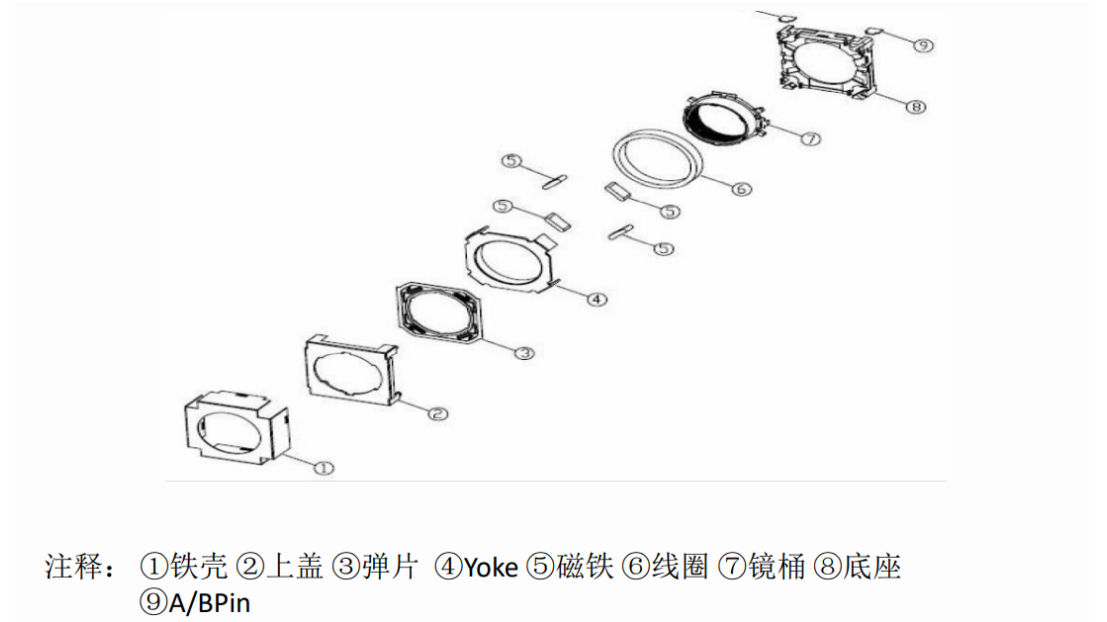
线圈和磁体是马达用于移动镜头的主要部件。
VCM是通过电流来让透镜移动,Camera模组厂 会提供-VCM Performance,让VCM Driver控制; Download与Upward为透镜后退或前进电流与距离的曲线图; 在曲线图都有最低驱动电流及最大移动位置,如Upward最低驱动电流为24mA表示起始 电流,而最大移动位置为0.2MM,对照下来电流为74mA;所以对照下来线圈通过 24mA~74mA为VCM工作电流,0~0.22MM为透镜移动范围。
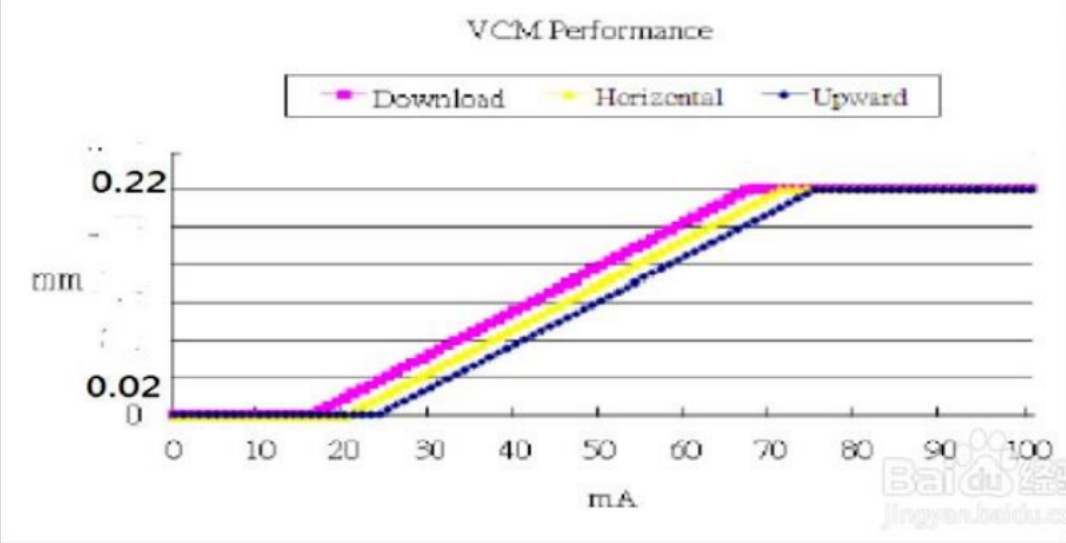
当然这个电流与移动位置的曲线图,一般在软件上不会使用,马达与相机是一个整体,电流的控制并不需要我们在进行额外的控制。
sensor类型
sensor类型有两种,CMOS和CCD类型。
CMOS:complementary metal-oxide-semiconductor 互补式金属氧化物半导体
CCD:charge-coupled device 电荷耦合器件
传感器,是一种电子相机中的设备,它可以将镜头所呈现的光学图像转换为电信号。
在camera方面,sensor可以理解为芯片,里面包括一些像素点(pixel),以及isp信号处理器,目前手机camera sensor的厂商主要是Samsung/OV/SONY/GC/Hynix,其中Samsung/OV/SONY这三家垄断了中高端市场,而GC/Hynix则是主打低端的市场,其中GC基本上是在低端市场处于霸者地位(因为便宜)。
现在市面上的CCM sensor大致可以分为两种,一种为CMOS,一种为CCD,二者各有优势,占据者不同的CCM市场。
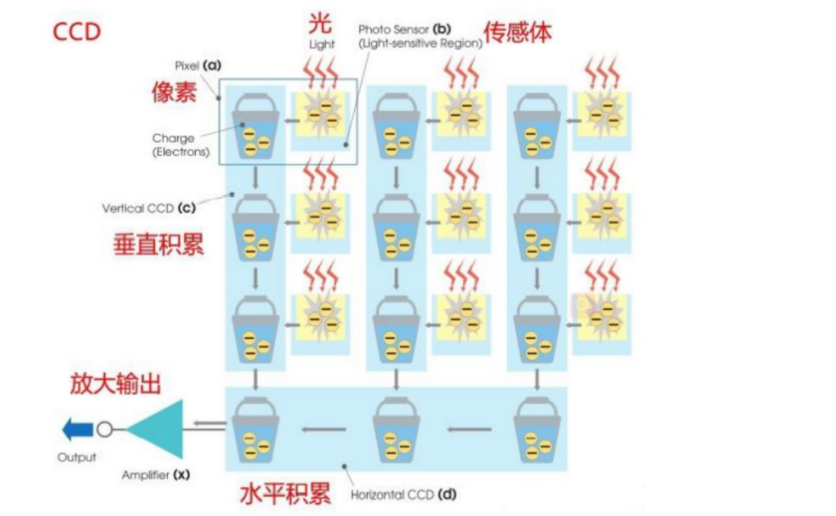
CCD(Charge Coupled Device),即“电荷耦合器件”,是一种感光半导体芯片,用于捕捉图形,但CCD没有能力记录图形数据,也没有能力永久保存,所有图形数据都会不停留地送入一个模数转换器,一个信号处理器以及一个存储设备。
CCD 主要材质为硅晶半导体,基本原理类似CASIO计算机上的太阳能电池,透过光电效应,由感光元件表面感应来源光线,从而转换成储存电荷的能力。 简单的说当CCD 表面接受到快门开启,镜头进来的光线照射时,即会将光线的能量转换成电荷,光线越强、电荷也就越多,这些电荷就成为判断光线强弱大小的依据,因此感光元件直接输出的电信号是模拟的。CCD元件上安排有通道线路,将这些电荷传输至放大解码原件,就能还原所有CCD上感光元件产生的讯号,并构成了一幅完整的画面。
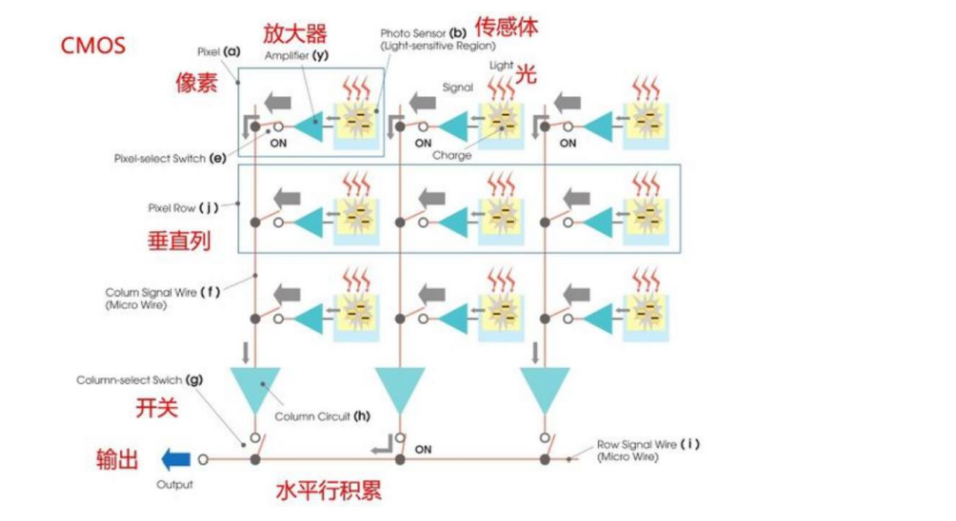
CMOS(Complementary Metal Oxide Semiconductor),即“互补金属氧化物半导体”。它是计算机系统内一种重要的芯片,保存了系统引导所需的大量资料。
CMOS 的材质主要是利用硅和锗这两种元素所做成的半导体,使其在CMOS上共存着带N(带 - 电)和 P(带 + 电)级的半导体,这两个互补效应所产生的电流即可被处理晶片纪录和解读成影像。后来发现CMOS经过加工也可以作为数码摄影中的图像传感器,CMOS传感器也可细分为被动式像素传感器(Passive Pixel Sensor CMOS)与主动式像素传感器(Active Pixel Sensor CMOS)
CMOS图像传感器在离开每一个像素之前,立即将桶内的电荷转换成电压,信号读取十分简单,速度也比CCD快很多;现代CMOS传感器还包括每个像素的放大器。放大后,像素的电压输出通过总线传输到芯片的输出端。
手机camera使用的更多是CMOS的sensor,CMOS sensor的列阵都是采用Bayer模式,Bayer就是采用多枚滤光器呈棋盘状分布在感应区,其中绿色像素的数量是红色和蓝色的两倍,这点是针对人的眼睛对绿色最为敏感。
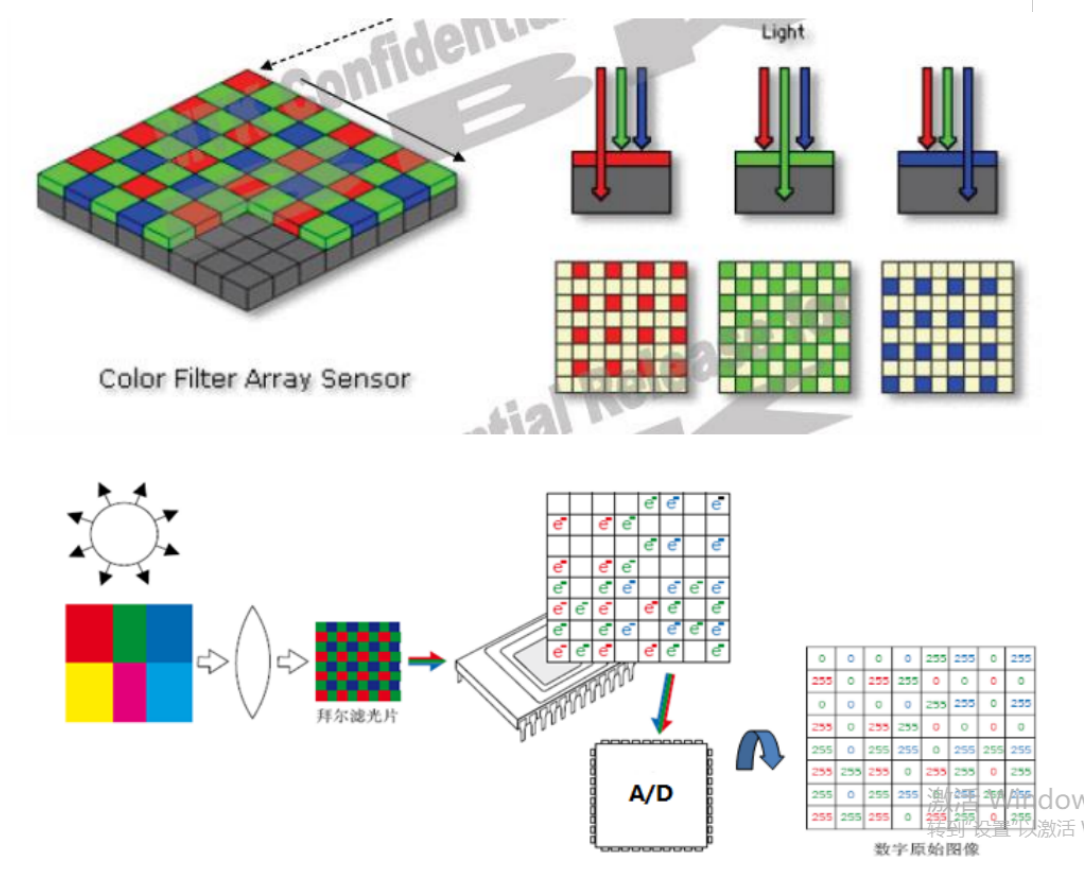
Sensor在接受光线后需要将光信号转化为电信号,最后转化为模拟信号,这些都需要对应的电子期间支持,而sensor作为一个元器件的集合体,需要供电以及将产生的数据信号输出给手机平台。
分类:
Camera / Camera基础知识
, Camera


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· Manus重磅发布:全球首款通用AI代理技术深度解析与实战指南
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· 【自荐】一款简洁、开源的在线白板工具 Drawnix