图像阈值_有cv2.threshold,cv2.adaptiveThreshold 等。
1.简单阈值
使用的函数:cv2.threshold (src, thresh, maxval, type)
注释:

与名字一样,这种方法非常简单。但像素值高于阈值时,我们给这个像素赋予一个新值(可能是白色),否则我们给它赋予另外一种颜色(也许是黑色)。这个函数就是cv2.threshhold()。这个函数的第一个参数就是原图像,原图像应该是灰度图。第二个参数就是用来对像素值进行分类的阈值。第三个参数就是当像素值高于(有时是小于)阈值时应该被赋予的新的像素值。OpenCV提供了多种不同的阈值方法,这是有第四个参数来决定的。这些方法包括:
• cv2.THRESH_BINARY
• cv2.THRESH_BINARY_INV
• cv2.THRESH_TRUNC
• cv2.THRESH_TOZERO
• cv2.THRESH_TOZERO_INV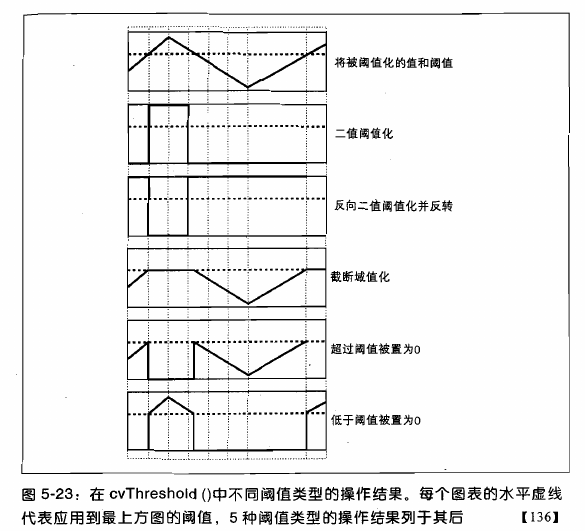
代码:
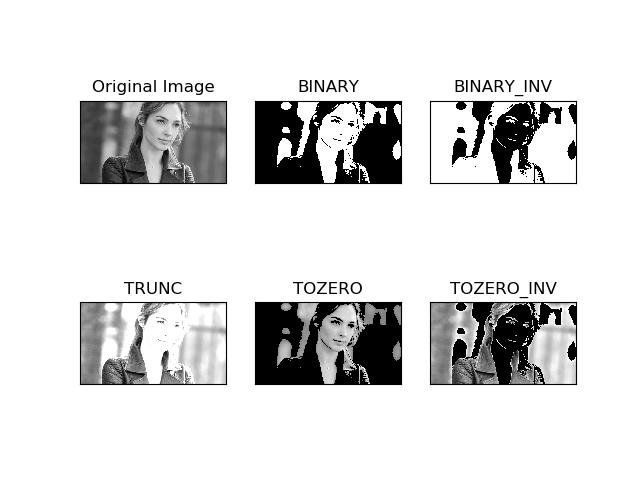
import cv2 import numpy as np from matplotlib import pyplot as plt img = cv2.imread('test.jpg',0) ret,thresh1 = cv2.threshold(img,127, 255, cv2.THRESH_BINARY) ret,thresh2 = cv2.threshold(img,127, 255, cv2.THRESH_BINARY_INV) ret,thresh3 = cv2.threshold(img,127, 255, cv2.THRESH_TRUNC) ret,thresh4 = cv2.threshold(img,127, 255, cv2.THRESH_TOZERO) ret,thresh5 = cv2.threshold(img,127, 255, cv2.THRESH_TOZERO_INV) titles = ['Original Image', 'BINARY', 'BINARY_INV', 'TRUNC', 'TOZERO', 'TOZERO_INV'] images = [img, thresh1, thresh2, thresh3, thresh4, thresh5] for i in range(6): plt.subplot(2, 3, i+1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]), plt.yticks([]) plt.show()
运行结果如下图所示:
2.自适应阈值
使用的函数:dst = cv2.adaptiveThreshold(src, maxval, thresh_type, type, Block Size, C)
注释:

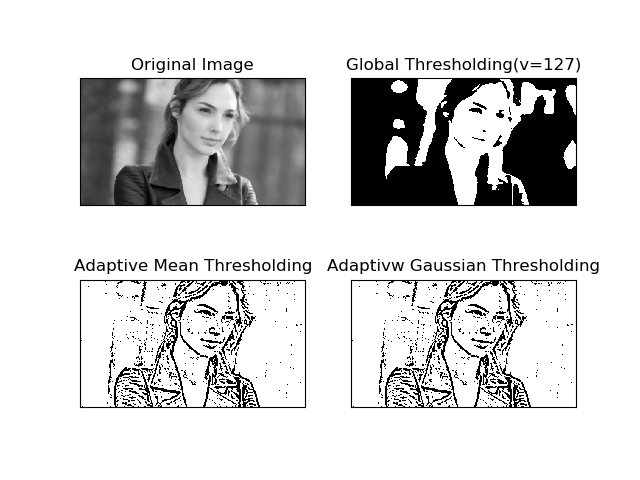
在前面的部分我们使用是全局阈值,整幅图像采用同一个数作为阈值。当时这种方法并不适应与所有情况,尤其是当同一幅图像上的不同部分的具有不同亮度时。这种情况下我们需要采用自适应阈值。此时的阈值是根据图像上的每一个小区域计算与其对应的阈值。因此在同一幅图像上的不同区域采用的是不同的阈值,从而使我们能在亮度不同的情况下得到更好的结果。这种方法需要我们指定三个参数,返回值只有一个。
• Adaptive Method- 指定计算阈值的方法。
– cv2.ADPTIVE_THRESH_MEAN_C:阈值取自相邻区域的平
均值
– cv2.ADPTIVE_THRESH_GAUSSIAN_C:阈值取值相邻区域
的加权和,权重为一个高斯窗口。
• Block Size - 邻域大小(用来计算阈值的区域大小)。
• C - 这就是是一个常数,阈值就等于的平均值或者加权平均值减去这个常
数。
代码:
import cv2 import numpy as np from matplotlib import pyplot as plt img = cv2.imread('test.jpg', 0) #中值滤波 img = cv2.medianBlur(img, 5) ret, th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY) th2 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2) th3 = cv2.adaptiveThreshold(img, 255, cv2.ADAPTIVE_THRESH_GAUSSIAN_C, cv2.THRESH_BINARY, 11, 2) titles = ['Original Image', 'Global Thresholding(v=127)', 'Adaptive Mean Thresholding', 'Adaptivw Gaussian Thresholding'] images = [img, th1, th2, th3] for i in range(4): plt.subplot(2, 2, i+1), plt.imshow(images[i], 'gray') plt.title(titles[i]) plt.xticks([]),plt.yticks([]) plt.show()
结果如下所示:
3.Otsu’s 二值化
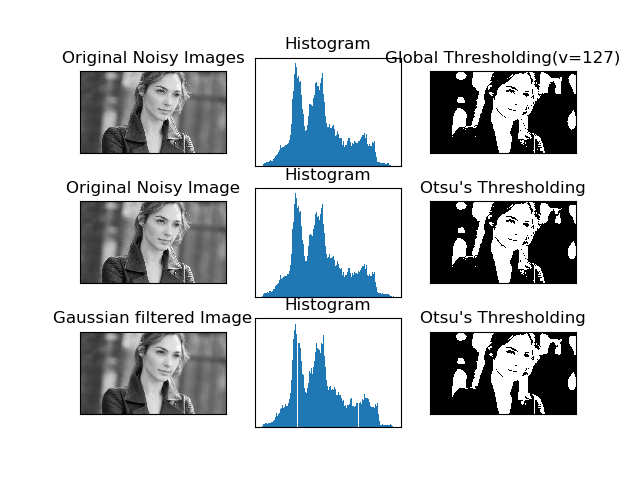
在第一部分中我们提到过retVal,当我们使用Otsu 二值化时会用到它。那么它到底是什么呢?在使用全局阈值时,我们就是随便给了一个数来做阈值,那我们怎么知道我们选取的这个数的好坏呢?答案就是不停的尝试。如果是一副双峰图像(简单来说双峰图像是指图像直方图中存在两个峰)呢?我们岂不是应该在两个峰之间的峰谷选一个值作为阈值?这就是Otsu 二值化要做的。简单来说就是对一副双峰图像自动根据其直方图计算出一个阈值。(对于非双峰图像,这种方法得到的结果可能会不理想)。这里用到到的函数还是cv2.threshold(),但是需要多传入一个参数(flag):cv2.THRESH_OTSU。这时要把阈值设为0。然后算法会找到最优阈值,这个最优阈值就是返回值retVal。如果不使用Otsu 二值化,返回的retVal 值与设定的阈值相等。
下面的例子中,输入图像是一副带有噪声的图像。第一种方法,我们设127 为全局阈值。第二种方法,我们直接使用Otsu 二值化。第三种方法,我们首先使用一个5x5 的高斯核除去噪音,然后再使用Otsu 二值化。看看噪音去除对结果的影响有多大吧。
代码:
import cv2 import numpy as np from matplotlib import pyplot as plt img = cv2.imread('test.jpg', 0) ret,th1 = cv2.threshold(img, 127, 255, cv2.THRESH_BINARY) ret,th2 = cv2.threshold(img, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) blur = cv2.GaussianBlur(img, (5,5), 0) #阈值一定要设为0 ret3, th3 = cv2.threshold(blur, 0, 255, cv2.THRESH_BINARY+cv2.THRESH_OTSU) images = [img, 0, th1, img, 0, th2, blur, 0, th3] titles = ['Original Noisy Images', 'Histogram', 'Global Thresholding(v=127)', 'Original Noisy Image', 'Histogram', "Otsu's Thresholding", 'Gaussian filtered Image', 'Histogram', "Otsu's Thresholding"] for i in range(3): plt.subplot(3,3,i*3+1), plt.imshow(images[i*3],'gray') plt.title(titles[i*3]),plt.xticks([]), plt.yticks([]) plt.subplot(3,3,i*3+2),plt.hist(images[i*3].ravel(),256) plt.title(titles[i*3+1]), plt.xticks([]),plt.yticks([]) plt.subplot(3,3,i*3+3), plt.imshow(images[i*3+2],'gray') plt.title(titles[i*3+2]),plt.xticks([]),plt.yticks([]) plt.show()
结果如图所示:
使用的原图如下:


 浙公网安备 33010602011771号
浙公网安备 33010602011771号