

Sensor fusion (lidar and radar)
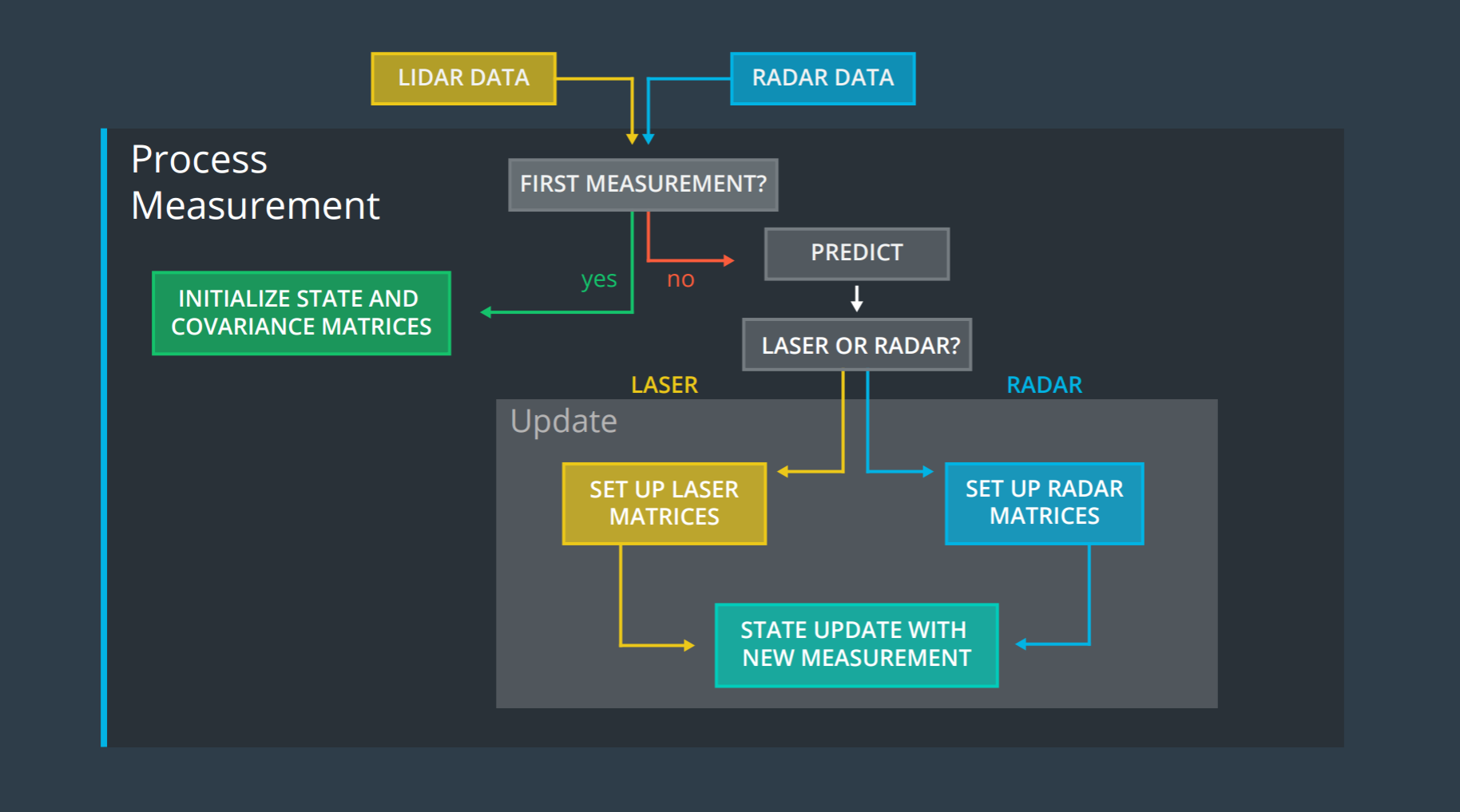
Prediction:
constant velocity model
Measurement:
Lidar: messen lediglich Position
Radar: messen Position und Geschwindigkeit based of polar coodinate
mit Taylor Serie Linearisierung zu realisieren und H.
Uncertainty beeinflusst the weight von entsprechender Daten. Je größer, desto kleiner.
Validierung: mit Standabweichung zwischen geschätztem Wert und realem Wert.

