张正友相机标定法原理与实现
转载: https://blog.csdn.net/qq_40369926/article/details/89251296
张正友相机标定法是张正友教授1998年提出的单平面棋盘格的相机标定方法。传统标定法的标定板是需要三维的,需要非常精确,这很难制作,而张正友教授提出的方法介于传统标定法和自标定法之间,但克服了传统标定法需要的高精度标定物的缺点,而仅需使用一个打印出来的棋盘格就可以。同时也相对于自标定而言,提高了精度,便于操作。因此张氏标定法被广泛应用于计算机视觉方面。
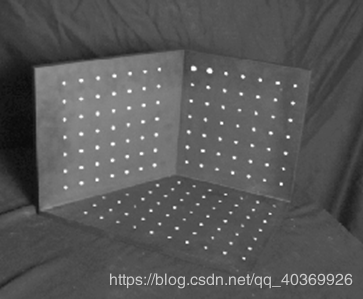
传统标定法的的标定板
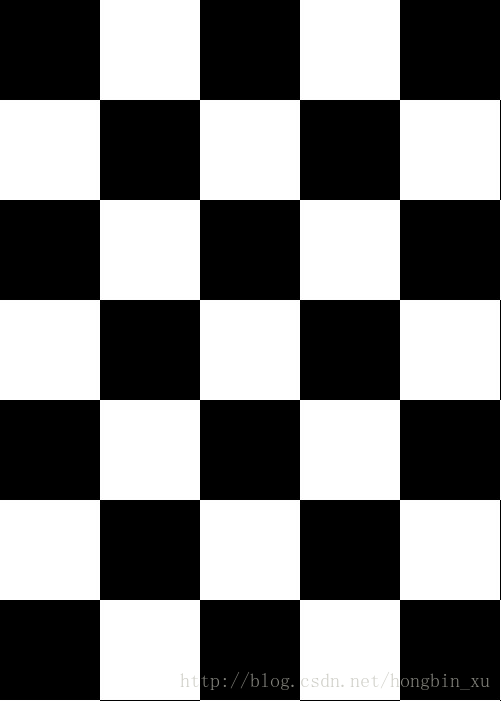
张正友标定法的标定板
今天,我们就来讲解一下张氏标定法的原理和实现,学会之后,我们就可以自己去制作一个棋盘标定板,然后拍照,标定自己手机相机的参数啦!
一、相机标定介绍
二、算法原理
1.整体流程
2.模型假设
3.模型求解
(1)内外参数求解
(2)畸变系数求解
(3)精度优化
三、算法实现
1.main.py
2.homography.py
4.extrinsics.py
5.distortion.py
6.refine_all.py
7.结果
一、相机标定介绍
相机标定指建立相机图像像素位置与场景点位置之间的关系,根据相机成像模型,由特征点在图像中坐标与世界坐标的对应关系,求解相机模型的参数。相机需要标定的模型参数包括内部参数和外部参数。
针孔相机成像原理其实就是利用投影将真实的三维世界坐标转换到二维的相机坐标上去,其模型示意图如下图所示:
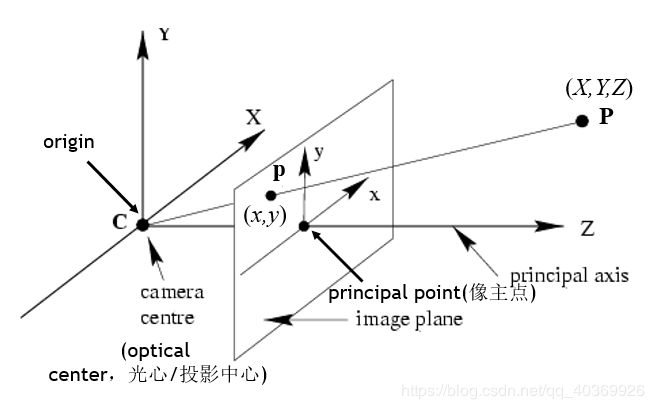
从图中我们可以看出,在世界坐标中的一条直线上的点在相机上只呈现出了一个点,其中发生了非常大的变化,同时也损失和很多重要的信息,这正是我们3D重建、目标检测与识别领域的重点和难点。实际中,镜头并非理想的透视成像,带有不同程度的畸变。理论上镜头的畸变包括径向畸变和切向畸变,切向畸变影响较小,通常只考虑径向畸变。
径向畸变:径向畸变主要由镜头径向曲率产生(光线在远离透镜中心的地方比靠近中心的地方更加弯曲)。导致真实成像点向内或向外偏离理想成像点。其中畸变像点相对于理想像点沿径向向外偏移,远离中心的,称为枕形畸变;径向畸点相对于理想点沿径向向中心靠拢,称为桶状畸变。

枕形畸变
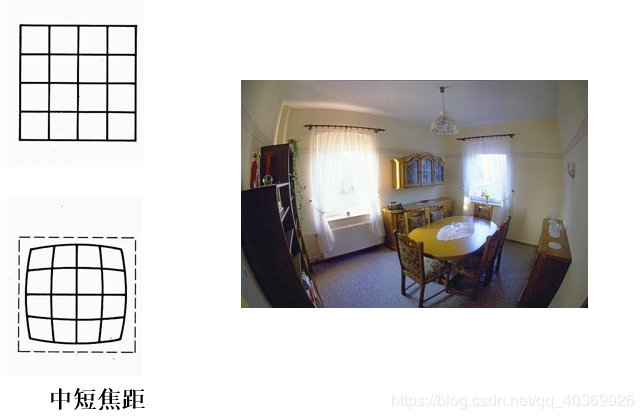
桶状畸变
用数学公式来表示:

即

其中,为相机中的坐标;为真实世界坐标;为内参矩阵;为外参矩阵
为内参矩阵,是相机内部参数组成的一个3*3的矩阵,其中,代表焦距;为畸变参数,为中心点坐标,为纵横比例参数,我们可以默认设为1,所以。
为外参矩阵,是描述照相机方向的旋转矩阵,是描述照相机中心位置的三维平移向量。
二、算法原理
1.整体流程

2.模型假设


3.模型求解
(1)内外参数求解
每一个不曾起舞的日子,都是对生命的辜负。
But it is the same with man as with the tree. The more he seeks to rise into the height and light, the more vigorously do his roots struggle earthward, downward, into the dark, the deep - into evil.
其实人跟树是一样的,越是向往高处的阳光,它的根就越要伸向黑暗的地底。----尼采

 浙公网安备 33010602011771号
浙公网安备 33010602011771号