四元数和旋转(Quaternion & rotation)
本篇文章主要讲述3D空间中的旋转和四元数之间的关系。其中会涉及到矩阵、向量运算,旋转矩阵,四元数,旋转的四元数表示,四元数表示的旋转如何转化为旋转矩阵。层层铺垫,可能文章有点长。基础好的同学,可以直接跳到四元数表示旋转部分,见下文公式(18)和公式(21)。
1 向量的点积和叉积
1.1 点积
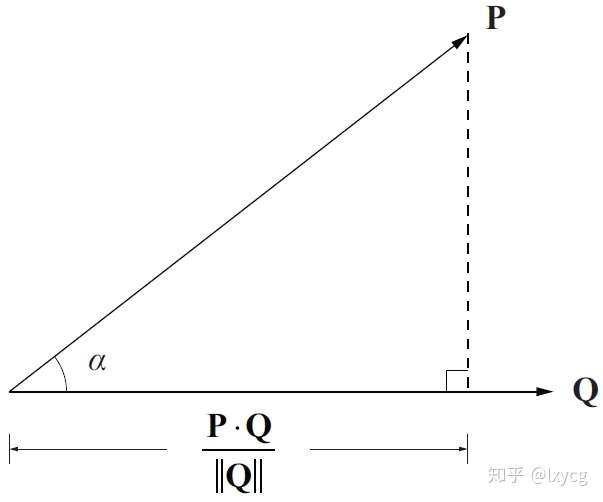
给定两个n维向量\(\mathbf{P}, \mathbf{Q}\),则它们的点积(dot product,又称为内积)为:
\[\mathbf{P}\cdot \mathbf{Q} = \left\|\mathbf{P}\right\| \left\|\mathbf{Q}\right\|\cos\alpha \qquad(1),
\]
其中\(\alpha\)是两向量之间的夹角。
![proj]()
图1 向量P在Q上的投影
如上面图1,向量\(\mathbf{P}\)在\(\mathbf{Q}\)上的投影为:
\[proj_Q \mathbf{P} = \frac{\mathbf{P}\cdot \mathbf{Q}}{\left\|\mathbf{Q}\right\|^2}\mathbf{Q}
\]
向量\(\mathbf{P}\)垂直于\(\mathbf{Q}\)的分量为:
\[\begin{aligned}
perp_Q \mathbf{P} &= \mathbf{P} - proj_Q \mathbf{P}\\
&=\mathbf{p} - \frac{\mathbf{P}\cdot \mathbf{Q}}{\left\|\mathbf{Q}\right\|^2}\mathbf{Q}
\end{aligned}
\]
其中,向量\(\mathbf{P}\)在\(\mathbf{Q}\)上的投影可以看作\(\mathbf{P}\)的线性变换,可以写成矩阵向量积:
\[proj_Q \mathbf{P} = \frac{1}{\left\|\mathbf{Q}\right\|^2}\left[
\begin{matrix}
\mathcal{Q}_x^2 & \mathcal{Q}_x\mathcal{Q}_y & \mathcal{Q}_x\mathcal{Q}_z\\
\mathcal{Q}_x\mathcal{Q}_y & \mathcal{Q}_y^2 & \mathcal{Q}_y\mathcal{Q}_z \\
\mathcal{Q}_x\mathcal{Q}_z & \mathcal{Q}_y\mathcal{Q}_z & \mathcal{Q}_z^2
\end{matrix}
\right]
\left[
\begin{matrix}
P_x\\
P_y\\
P_z
\end{matrix}
\right]
\qquad (2)
\]
1.2 叉积(cross product)
给定两个3D向量\(\mathbf{P}, \mathbf{Q}\),则它们的叉积(又称为向量积,vector product)是一个向量:
\[\mathbf{P}\times \mathbf{Q} = \left \langle P_yQ_z - P_zQ_y, P_zQ_x - P_xQ_z, P_xQ_y - P_yQ_x \right \rangle.
\]
叉积的模:
\[\left \| \mathbf{P}\times \mathbf{Q}\right \| = \left \| \mathbf{P} \right \| \left \| Q \right \| \sin\alpha
\]
叉积也可以写成矩阵向量相乘的形式:
\[\mathbf{P}\times \mathbf{Q} =
\left[
\begin{matrix}
0 & -P_z & P_y \\
P_z & 0 & -P_x \\
-P_y & P_x & 0
\end{matrix}
\right]
\left[
\begin{matrix}
\mathcal{Q}_x \\
\mathcal{Q}_y \\
\mathcal{Q}_z
\end{matrix}
\right]
\qquad (3)
\]
先看二维空间中的旋转。
![rotation90]()
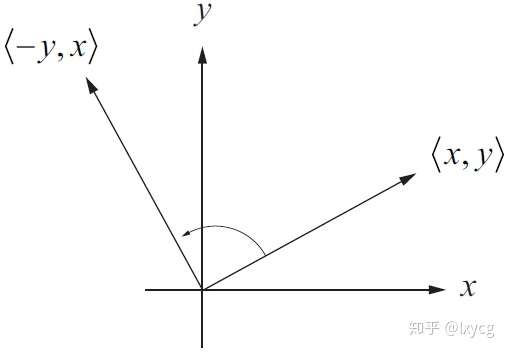
图2 x-y平面中向量P旋转90度
如上面图2,在x-y平面上把向量\(\mathbf{P} = \left \langle x, y \right \rangle\)逆时针旋转90度,变成了向量\(\mathbf{Q} = \left \langle -P_y, P_x \right \rangle = \left \langle -y, x \right \rangle\)。向量\(\mathbf{P}, \mathbf{Q}\)形成了x-y平面的一个正交基,因此我们可以用这两个向量表示x-y平面的任意向量。
![rotation2d]()
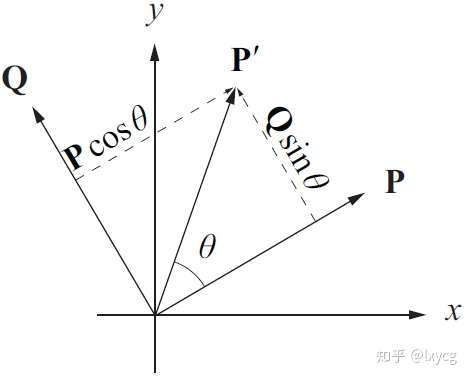
图3 x-y平面中向量P旋转theta度
如上面图3,向量\(\mathbf{Q}\)是向量\(\mathbf{P}\)逆时针旋转90度后得到的向量,向量\(\mathbf{P'}\)是向量\(\mathbf{P}\)旋转\(\theta\)度得到的向量,则:
\[\mathbf{P'} = \mathbf{P}\cos\theta + \mathbf{Q}\sin\theta .
\]
即
\[P'_x = P_x\cos\theta - P_y\sin\theta \\
P'_y = P_y\cos\theta + P_x\sin\theta
\]
写成矩阵形式,即:
\[\mathbf{P'}=
\left[
\begin{matrix}
\cos\theta & -\sin\theta\\
\sin\theta & \cos\theta
\end{matrix}
\right]
\mathbf{P}
\]
上面的旋转矩阵可以扩展为三维空间中绕z轴旋转\(\theta\)角度的矩阵(只要保证旋转后z坐标不变):
\[\mathbf{R}_z(\theta) = \left[
\begin{matrix}
\cos\theta & -\sin\theta & 0\\
\sin\theta & \cos\theta & 0\\
0 & 0 & 1
\end{matrix}
\right]
\]
类似地,也可以推出三维空间中绕x轴、y轴的旋转矩阵:
\[\mathbf{R}_x(\theta) = \left[
\begin{matrix}
1 & 0 & 0\\
0 & \cos\theta & -\sin\theta\\
0 & \sin\theta & \cos\theta
\end{matrix}
\right]
\]
\[\mathbf{R}_y(\theta)=\left[
\begin{matrix}
\cos\theta & 0 & \sin\theta\\
0 & 1 & 0\\
-\sin\theta & 0 & \cos\theta
\end{matrix}
\right]
\]
绕任意轴的旋转
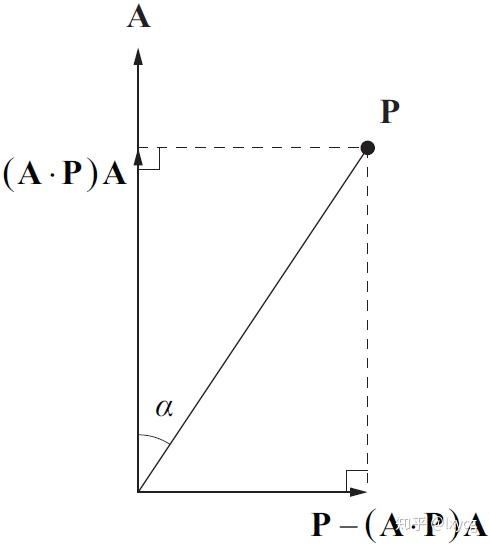
假设我们想要绕任意一个轴\(\mathbf{A}\)对向量\(\mathbf{P}\)旋转\(\theta\)度(其中\(\mathbf{A}\)是单位向量)。
因为旋转轴\(\mathbf{A}\)是单位向量,所以\(\mathbf{P}\)在\(\mathbf{A}\)上的投影可以简化为:
\[proj_{\mathbf{A}} \mathbf{P} = (\mathbf{A}\cdot \mathbf{P})\mathbf{A}
\]
则\(\mathbf{P}\)垂直于\(\mathbf{A}\)的分量为:
\[perp_{\mathbf{A}} \mathbf{P}=\mathbf{P}-(\mathbf{A}\cdot \mathbf{P})\mathbf{A}
\]
![arbitrary]()
图4. 绕任意轴旋转示意图
与旋转轴平行的分量\(proj_{\mathbf{A}} \mathbf{P}\)不受旋转的影响,我们只需要考虑垂直旋转轴的分量\(perp_{\mathbf{A}} \mathbf{P}\)。要注意的是,最后计算出旋转后的\(perp_{\mathbf{A}} \mathbf{P}\)要加上与旋转轴平行的分量,才能得到最终的旋转后的向量。
垂直分量绕\(\mathbf{A}\)的旋转发生于垂直于旋转轴\(\mathbf{A}\)的平面上。像之前一样,我们可以把旋转后的向量表示成向量\(perp_{\mathbf{A}} \mathbf{P}\)和\(perp_{\mathbf{A}} \mathbf{P}\)绕\(\mathbf{A}\)逆时针旋转90度后的向量(即下文说的\(\mathbf{A}\times \mathbf{P}\))的线性组合(linear combination)。
如图4所示,\(perp_{\mathbf{A}} \mathbf{P}\)的长度显然为\(\left \|\mathbf{P}\right \|\sin\alpha\),又旋转轴\(\mathbf{A}\)是单位向量,则\(\mathbf{A}\times \mathbf{P}\)刚好长度和\(相同,且垂直于\)\mathbf{A}\(和\)\mathbf{P}$,正是我们想要的向量。
现在,按照上面的论述,\(perp_{\mathbf{A}} \mathbf{P}\)绕\(\mathbf{A}\)旋转\(\theta\)后的向量可以表示为:
\[\left[\mathbf{P} - (\mathbf{A}\cdot \mathbf{P})\mathbf{A} \right]\cos\theta + (\mathbf{A}\times\mathbf{P})\sin\theta
\]
再加上不受旋转影响的分量\(proj_{\mathbf{A}} \mathbf{P}\),就得到了向量\(\mathbf{P}\)绕旋转轴\(\mathbf{A}\)旋转\(\theta\)角度后的向量\(\mathbf{P'}\)
\[\mathbf{P'} = \mathbf{P}\cos\theta + (\mathbf{A}\times \mathbf{P})\sin\theta + \mathbf{A}(\mathbf{A}\cdot\mathbf{P})(1-\cos\theta) \qquad (4)
\]
把\(\mathbf{A}\times \mathbf{P}\)和\(\mathbf{A}(\mathbf{A}\cdot\mathbf{P})\)换成对应的矩阵形式(参考上面的公式3和公式2)。我们可以得到:
\[\mathbf{P'} =
\left[
\begin{matrix}
1 & 0 & 0\\
0 & 1 & 0\\
0 & 0 & 1
\end{matrix}
\right]\mathbf{P}\cos\theta +
\left[
\begin{matrix}
0 & -A_z & A_y\\
A_z & 0 & -A_x\\
-A_y & A_x & 0
\end{matrix}
\right]\mathbf{P}\sin\theta \\+
\left[
\begin{matrix}
A_x^2 & A_xA_y & A_xA_z\\
A_xA_y & A_y^2 & A_yA_z\\
A_xA_z & A_yA_z & A_z^2
\end{matrix}
\right]\mathbf{P}(1-\cos\theta)
\qquad(5)
\]
把公式(5)中的各项结合起来(即提取出\(\mathbf{P}\)),同时设\(c=\cos\theta, s=\sin\theta\),则绕任意旋转轴\(\mathbf{A}\)旋转一个向量\(\theta\)角度的旋转矩阵为:
\[\mathbf{R}_{\mathbf{A}}(\theta)=\left[
\begin{matrix}
c+(1-c)A_x^2 & (1-c)A_xA_y-sA_z & (1-c)A_xA_z+sA_y\\
(1-c)A_xA_y+sA_z & c+(1-c)A_y^2 & (1-c)A_yA_z-sA_x\\
(1-c)A_xA_z-sA_y & (1-c)A_yA_z+sA_x & c+(1-c)A_z^2
\end{matrix}
\right]
\quad (6)
\]
3 四元数
3.1 四元数定义
四元数(quaternion)可以看作中学时学的复数的扩充,它有三个虚部。形式如下:
\(\mathbf{q}=<w, x, y, z> = w + xi + yj + zk\),可以写成\(\mathbf{q}=s+\mathbf{v}\)
具有如下性质:
\(i^2 = j^2 = k^2 = -1\)
\(ij = -ji = k\)
\(jk = -kj = i\)
\(ki = -ik = j\)
设\(\mathbf{q}_1 = s_1 + \mathbf{v}_1\),\(\mathbf{q}_2 = s_2 + \mathbf{v}_2\),则
\(\mathbf{q}_1\mathbf{q}_2 = s_1s_2 - \mathbf{v}_1\cdot \mathbf{v}_2 + s_1\mathbf{v}_2 + s_2\mathbf{v}_1 + \mathbf{v}_1\times \mathbf{v}_2\)
3.2 共 轭四元数
一个四元数\(\mathbf{q} = s + \mathbf{v}\)的共轭(用\(\bar{\mathbf{q}}\)表示)为\(\bar{\mathbf{q}} = s - \mathbf{v}\)
一个四元数和它的共轭的积等于该四元数与自身的点乘,也等于该四元数长度的平方。即,
\(\mathbf{q}\bar{\mathbf{q}} = \bar{\mathbf{q}} \mathbf{q}=\mathbf{q}\cdot\mathbf{q} = ||\mathbf{q}||^2=q^2\)
3.3 四元数的逆
一个非零四元数\(\mathbf{q}\)的逆为\(\mathbf{q^{-1}=\frac{\bar{\mathbf{q}}}{q^2}}\)。
显然\(\mathbf{q}\mathbf{q^{-1}}=1\)
3.4 四元数表示旋转
终于到正题了。
三维空间中的旋转可以被认为是一个函数\(\phi\),从\(\mathbb{R}^3\)到自身的映射。函数\(\phi\)要想表示一个旋转,必须在旋转过程中保持向量长度(lengths)、向量夹角(angles)和handedness不变。
(handedness和左右手坐标系有关,例如左手坐标系中向量旋转后,仍要符合左手坐标系规则)
长度保持不变要满足:
\[\left \|\phi(\mathbf{P}) \right \| = \left \|\mathbf{P} \right\| \qquad (7)
\]
角度不变要满足:
\[\phi(\mathbf{P_1})\cdot \phi(\mathbf{P_2}) = \mathbf{P_1}\cdot \mathbf{P_2} \qquad (8)
\]
最后,handedness保持不变要满足:
\[\phi(\mathbf{P_1})\times \phi(\mathbf{P_2})=\phi(\mathbf{P_1}\times\mathbf{P_2}) \qquad(9)
\]
扩展函数\(\phi\)成为一个从\(\mathbb{H}\)到其自身的映射,要求\(\phi(s+\mathbf{V})=s+\phi(\mathbf{V})\),这使得我们可以重写上面的方程(7):
\[\phi(\mathbf{P_1})\cdot\phi(\mathbf{P_2})=\phi(\mathbf{P_1}\cdot\mathbf{P_2}) \qquad (10)
\]
注意,这里把\(\mathbf{P_1}\)和\(\mathbf{P_2}\)当作标量部分(scalar part)为0的四元数(其实就是三维空间中的点),所以根据\(\phi(s+\mathbf{V})=s+\phi(\mathbf{V})\)可得到公式(10)。我们可以把方程(9)、(10)合写成一个公式(角度保持不变、handedness保持不变):
\[\phi(\mathbf{P_1})\phi(\mathbf{P_2})=\phi(\mathbf{P_1P_2}) \qquad (11)
\]
方程(11)两向量的乘其实既点乘、又是叉乘,二者合二为一,用一种形式写出来了。
一个满足方程(11)的函数\(\phi\)被称为同态(homomorphism,异质同形)。
重点来了:
由下面公式(12)给出的一类函数满足方程(7)和方程(11),可以表示旋转。
\[\phi_{\mathbf{q}}(\mathbf{P})=\mathbf{q}\mathbf{P}\mathbf{q^{-1}} \qquad (12)
\]
这里\(\mathbf{q}\)是一个非零四元数,函数的参数\(\mathbf{P}\)可以看作三维空间中的点(即一个实部或标量部分为0的四元数)。
首先证明方程(12)中的函数满足方程(7):
\[\left \|\phi_{\mathbf{q}}(\mathbf{P})\right \| = \left \|\mathbf{qPq^{-1}}\right \|=\left \|q\right \| \left \|\mathbf{P}\right \| \left\| q^{-1} \right \| = \left \|\mathbf{P}\right \| \frac{\left \|\mathbf{q}\right \|\left \|\bar{\mathbf{q}}\right \|}{q^2}=\left \|\mathbf{P}\right \| \qquad (13)
\]
更进一步地,\(\phi_{\mathbf{q}}\)是一个homomorphism,即满足方程(11),因为:
\[\phi_{\mathbf{q}}(\mathbf{P_1})\phi_{\mathbf{q}}(\mathbf{P_2})=\mathbf{qP_1q^{-1}qP_2q^{-1}}=\mathbf{qP_1P_2q^{-1}}=\phi_{\mathbf{q}}(\mathbf{P_1P_2}) \qquad (14)
\]
接下来我们要找到一个四元数\(\mathbf{q}\),使它对应于一个绕旋转轴\(\mathbf{A}\)旋转\(\theta\)的旋转变换。可以很容易证明对于任意非零标量\(a\),\(\phi_{a\mathbf{q}}=\phi_{\mathbf{q}}\)成立。为了使事情简单点,我们可以选择单位四元数\(\mathbf{q}\)。
设\(\mathbf{q}=s + \mathbf{v}\)为一个单位四元数,则它的逆为\(\mathbf{q^{-1}} = s - \mathbf{v}\)。再给一个三维空间中的点\(\mathbf{P}\)(相当于一个标量部分为0的四元数),就有:
\[\begin{aligned}
\mathbf{qPq^{-1}} &= (s + \mathbf{v})\mathbf{P}(s-\mathbf{v})\\
&= (-\mathbf{v}\cdot \mathbf{P} + s\mathbf{P} + \mathbf{v}\times\mathbf{P})(s-\mathbf{v})\\
&= -s\mathbf{p}\times\mathbf{v}-\mathbf{v}\times\mathbf{p}\times\mathbf{v}+s^2\mathbf{P}+s\mathbf{v}\times\mathbf{P}+\mathbf{v}\mathbf{P}\mathbf{v}-\mathbf{v}\mathbf{P}s+s\mathbf{P}\mathbf{v}+\mathbf{v}\times\mathbf{P}\cdot\mathbf{V} \\
&=s^2\mathbf{P}+2s\mathbf{v}\times \mathbf{P}+(\mathbf{v}\cdot\mathbf{P})\mathbf{v}-\mathbf{v}\times\mathbf{P}\times\mathbf{v}
\end{aligned}
\qquad (15)
\]
定理:给定任意两个3D向量\(\mathbf{P}, \mathbf{Q}\),则:
\(\mathbf{P}\times(\mathbf{Q}\times\mathbf{P})=\mathbf{P}\times\mathbf{Q}\times\mathbf{P}=P^2\mathbf{Q}-(\mathbf{P}\cdot\mathbf{Q})\mathbf{P}\)
所以,对方程(15)中的\(\mathbf{v}\times\mathbf{P}\times\mathbf{v}\)施加上述定理,方程(15)就变成了:
\[\mathbf{qPq^{-1}}=(s^2-\mathbf{v}^2)\mathbf{P}+2s\mathbf{v}\times\mathbf{P}+2(\mathbf{v}\cdot\mathbf{P})\mathbf{v} \qquad (16)
\]
设\(\mathbf{v}=t\mathbf{A}\),此处\(\mathbf{A}\)是一个单位向量,即旋转轴,重写方程(16)为:
\[\mathbf{qPq^{-1}}=(s^2-t^2)\mathbf{P}+2st\mathbf{A}\times\mathbf{P}+2t^2(\mathbf{A}\cdot\mathbf{P})\mathbf{A} \qquad (17)
\]
把方程(17)和上面说过的绕任意轴旋转的公式(4)进行比较。
上面说过的公式(4)😒\mathbf{P'} = \mathbf{P}\cos\theta + (\mathbf{A}\times \mathbf{P})\sin\theta + \mathbf{A}(\mathbf{A}\cdot\mathbf{P})(1-\cos\theta) \qquad $
我们可以推出以下等式:
\[\begin{aligned}
s^2 - t^2 &= \cos\theta\\
2st &= \sin\theta\\
2t^2 &= 1 - \cos\theta
\end{aligned}
\]
由第三个等式可以解出:
\[t=\sqrt{\frac{1-\cos\theta}{2}}=\sin\frac{\theta}{2}
\]
由第一和第三个等式可推出\(s^2+t^2=1\),所以\(s=\cos\frac{\theta}{2}\)。
所以,我们找到了一个单位四元数\(\mathbf{q}\),其对应于绕旋转轴\(\mathbf{A}\)旋转\(\theta\)角度的旋转变换(重要结论):
\[\begin{aligned}
\mathbf{q} &=s+\mathbf{v}\\
&=s+t\mathbf{A}\\
&=\cos\frac{\theta}{2} + \mathbf{A}\sin\frac{\theta}{2}
\end{aligned}
\qquad (18)
\]
这里顺便证明一下对于任意非零\(a\)(如,\(a=-1\)),\(a\mathbf{q}\)和\(\mathbf{q}\)表示同一个旋转,因为
\[(a\mathbf{q})\mathbf{P}(a\mathbf{q})^{-1}=a\mathbf{qP}\frac{\mathbf{q^{-1}}}{a}=\mathbf{qPq^{-1}}
\]
两个四元数\(\mathbf{q_1}\)和\(\mathbf{q_2}\)的乘积也表示一个旋转。例如,\(\mathbf{q_1q_2}\)表示施加旋转\(\mathbf{q_2}\),再施加旋转\(\mathbf{q_1}\)。因为:
\[\mathbf{q_1(q_2Pq_2^{-1})q_1^{-1}}=\mathbf{(q_1q_2)P(q_1q_2)^{-1}}
\]
我们可以连接任意多个表示旋转的四元数,形成一个单一的四元数。
两个四元数相乘需要16个乘加运算(multiply-add),然而两个\(3\times 4\)矩阵相乘需要27个乘加运算。因此在某些情况下(比如要对同一个对象施加多个旋转变换时),用四元数表示旋转,计算效率会高些。
总之,通过一个四元数\(\mathbf{q}\)对一个点\(\mathbf{P}\)施加旋转变换,只需要做如下计算:
\[\mathbf{P'}=\mathbf{qPq^{-1}}
\]
3.5 四元数转换为旋转矩阵
有时需要把四元数转换为\(3\times 3\)的旋转矩阵,例如,使用某些3D图形库时。
我们可以根据方程(2)和方程(3),把方程(17)写程矩阵形式,来找到四元数\(\mathbf{q}=s+t\mathbf{A}\)对应的旋转矩阵:
\[\mathbf{qPq^{-1}}=\left[
\begin{matrix}
s^2-t^2 & 0 & 0\\
0 & s^2-t^2 & 0\\
0 & 0 & s^2-t^2
\end{matrix}
\right]\mathbf{P}+
\left[
\begin{matrix}
0 & -2stA_z & 2stA_y\\
2stA_z & 0 & -2stA_x\\
-2stA_y & 2stA_x &0
\end{matrix}
\right]\mathbf{P}\\
+\left[
\begin{matrix}
2t^2A_x^2 & 2t^2A_xA_y & 2t^2A_xA_z\\
2t^2A_xA_y & 2t^2A_y^2 & 2t^2A_yA_z\\
2t^2A_xA_y & 2t^2A_yA_z & 2t^2A_z^2
\end{matrix}
\right]\mathbf{P} \qquad (19)
\]
把四元数\(\mathbf{q}\)写成四维向量的形式\(\mathbf{q}=\left \langle w, x, y, z \right\rangle\),其中\(w=s, x=tA_x, y=tA_y, z=tA_z\)。因为\(\mathbf{A}\)是单位向量,所以:
\[x^2 + y^2 + z^2 = t^2 \quad A^2=t^2
\]
用\(w, x, y, z\)的形式来重写方程(19):
\[\mathbf{qPq^{-1}}=\left[
\begin{matrix}
w^2-x^2-y^2-z^2 & 0 & 0\\
0 & w^2-x^2-y^2-z^2 & 0\\
0 & 0 & w^2-x^2-y^2-z^2
\end{matrix}
\right]\mathbf{P}\\
+\left[
\begin{matrix}
0 & -2wz & 2wy\\
2wz & 0 & -2wx\\
-2wy & 2wx & 0
\end{matrix}
\right]\mathbf{P}+
\left[
\begin{matrix}
2x^2 & 2xy & 2xz\\
2xy & 2y^2 & 2yz\\
2xz & 2yz & 2z^2
\end{matrix}
\right]\mathbf{P} \qquad (20)
\]
因为\(\mathbf{q}\)是一个单位四元数,则\(w^2+x^2+y^2+z^2=1\),所以
\[w^2 - x^2 - y^2 - z^2 = 1 -2x^2 - 2y^2 - 2z^2
\]
结合上面这个等式及方程(20)中的三个矩阵,我们可以得到对应于四元数\(\mathbf{q}\)的旋转矩阵:
\[\mathbf{R_q}=\left[
\begin{matrix}
1-2y^2-2z^2 & 2xy-2wz & 2xz+2wy\\
2xy+2wz & 1-2x^2-2z^2 & 2yz-2wx\\
2xz-2wy & 2yz+2wx & 1-2x^2-2y^2
\end{matrix}
\right] \qquad (21)
\]
原文,见知乎专栏文章:https://zhuanlan.zhihu.com/p/78987582
参考文献:
- Mathematics for 3D Game Programming and Computer Graphics 英文版第三版,第2、3、4章。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号