
Arduino控制舵机
一、接线
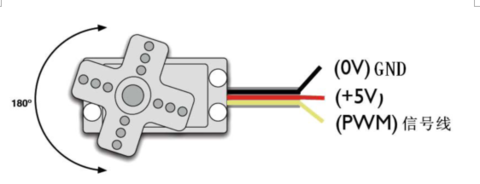
| 舵机 | Arduino |
| GND | GND |
| +5V | 5V |
| PWN | 10 |
其中信号线PWN接arduino上任意带波浪号的引脚都可,我这里选择的是10号引脚,注意在程序中绑定的引脚要和连接的引脚相同
二、上传程序
1 #include <Servo.h>//包含需要的头文件 2 3 Servo myservo; 4 5 void setup() { 6 myservo.attach(10);//绑定连接舵机信号引脚的接口 7 8 myservo.write(0);//调整舵机角度 9 delay(1000);//暂停1秒 10 myservo.write(30); 11 delay(1000); 12 myservo.write(60); 13 delay(1000); 14 myservo.write(90); 15 delay(1000); 16 myservo.write(120); 17 delay(1000); 18 myservo.write(150); 19 delay(1000); 20 myservo.write(180); 21 delay(1000); 22 myservo.detach();//释放舵机绑定 23 } 24 25 void loop() { 26 27 }

