深度学习入门(6)
参考原文链接🔗:https://developer.aliyun.com/article/96427
上节我们提到,感知机无法解决“异或”的问题,解决这个问题的关键在于,是否能解决非线性可分问题。要解决这个问题,简单来说,就是使用更复杂的网络,也就是多层前馈网络。
多层网络搞定“异或”问题
深度学习是一个包括很多隐含层的复杂网络结构,感知机无法解决“非线性可分”问题,是因为它过于简单。
要想解决“异或”问题,就要让网络复杂起来。这是因为,复杂的网络,表征能力比较强。按照这个思路,我们在输入层和输出层之间,增加一层神经元,称为隐含层(又称“隐层”)。这样一来,隐含层和输出层中的神经元都拥有激活函数。假设各个神经元的阈值均为0.5,这样就实现了“异或”功能。
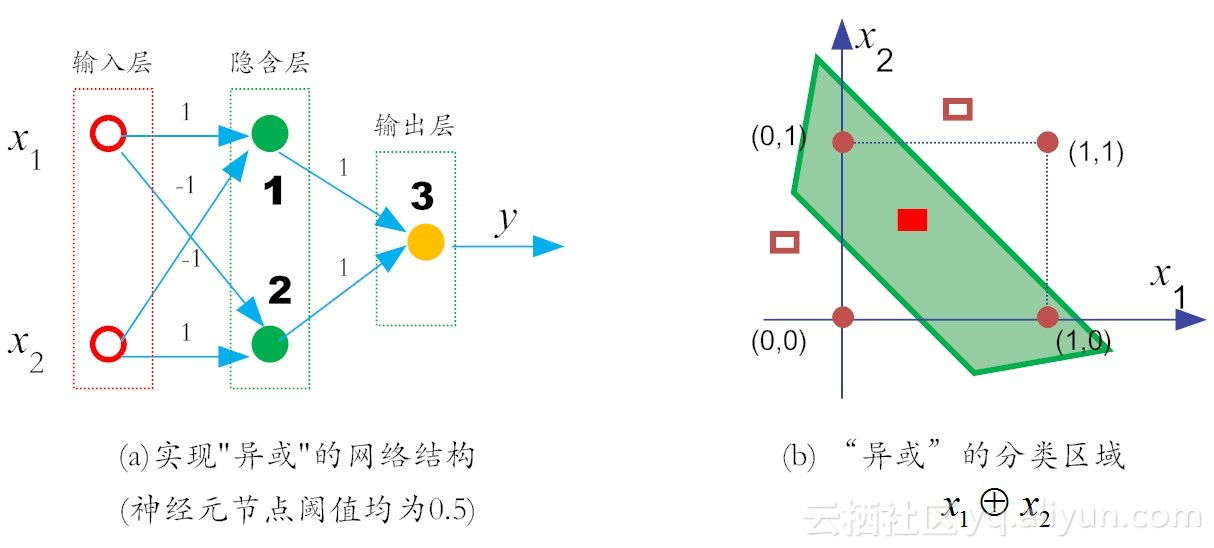
假设在a图中所示的神经元(即实心圆)的激活函数依然是阶跃函数(即sgn函数),那么它的输出规则十分简单:当x>0时,f(x)输出为1,否则输出0。
那么对于x1和x2相同(均为1)时,对于在隐含层的神经元1有:
类似地,对于在隐含层的神经元2有:
然后,对于输出层的神经元3而言,这时f1和f2是它的输入,于是有:
也就是说,二者同为1时,输出为0。
对于x1和x2不同时,对于在隐含层的神经元1有:
类似地,对于在隐含层的神经元2有:
对于神经元3,有:
不失一般性,x1和x2的角色地位是可以互换的,因此,上面的两层感知机,可以实现“异或”功能。在这里,网络中的权值和阈值是我们实现给定的,而实际上,它们是由神经网络自己通过反复“试错”学习而来的。
简单来说,深度学习,就是包括很多隐含层的神经网络学习,这里的“深”即意味着“层深”。
多层前馈神经网络
更一般的,常见的多层神经网络如图所示,在这种结构中,每一层神经元仅仅与下一层的神经元完全链接,在同一层,神经元彼此之间不连接,而且跨层的神经元,彼此间也不相连。这种被简化的神经网络结构,称为“多层前馈神经网络”。
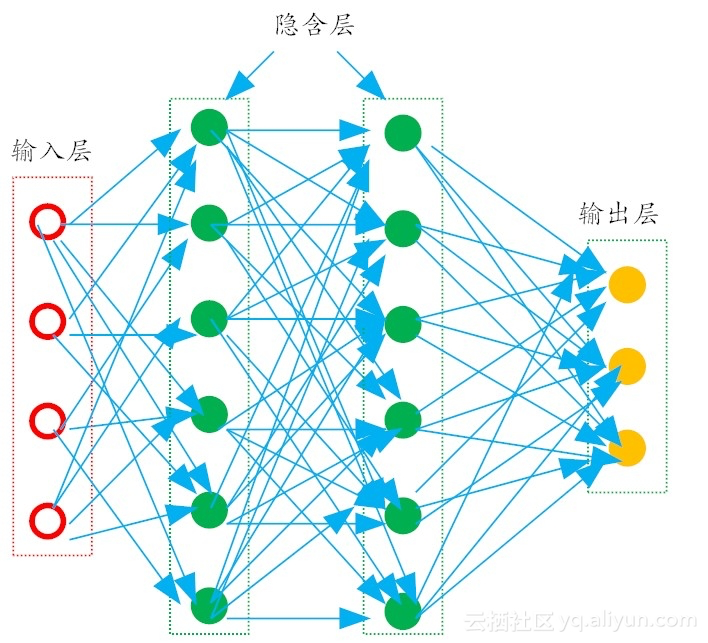
在多层前馈神经网络中,输出层神经主要用于接收外加的输入信息,在隐含层和输出层中,都有内置的激活函数,可以对输入信号进行加工处理,最终的结果,由输出层“呈现”出来。
这里需要说明的是,神经元中的激活函数,并不限于我们之前提到的阶跃函数、Sigmod函数,还可以是现在深度学习常用的ReLU和sofmax等。
简单来说,神经网络的学习过程,就是通过根据训练数据,来调整神经元之间的连接权值以及每个功能神经元的输出阈值。换言之,神经网络需要学习的东西,就蕴含在连接权值和阈值中。
拟人化来说,对于识别某个对象来说,神经网络中的连接权值和阈值,就像是它关于这个对象的“记忆”,大脑对于事物和概念的记忆,不是存储在某个单一的地点,而是像分布式地存在于一个巨大的神经元网络之中。
分布式表征,是人工神经网络研究的一个核心思想,简单来说,就是当我们表达一个概念时,神经元与概念之间不是一对一对应映射存储的,他们的关系是多对多。具体而言,就是一个概念可以用多个神经元共同定义表达,同时一个神经元也可以参与多个不同概念的表达,只不过占的权重不同。
举例来说,对于“小红汽车”这个概念,如果用分布式特征地表达,那么可能是一个神经元代表大小(形状:小),一个神经元代表颜色(颜色:红),还有一个神经元代表车的类别(类别:汽车)。当这三个神经元同时被激活时,就可以准确的描述我们要表达的物体。
分布式表征表示有很多优点,其中最重要的一点,是当部分神经元发生故障时,信息的表达不会出现覆灭性的破坏。
前文提到,对于相对复杂的前馈神经网络,其各个神经元之间的链接权值和其内部的阈值,是整个神经网络的灵魂所在,它需要通过反复训练,方可得到合适的值。而训练的抓手,就是实际输出值和预期输出值之间存在的“落差”(可以称之为“误差”)。
下面,我们来讲述如何用“落差”来反向调节网络参数。
我们知道,在机器学习中的“有监督学习”算法里,在假设空间F中,构造一个决策函数f,对于给定的输入X,由f(X)给出相应的输出Y,这个实际输出值Y和原先预期值Y'可能不一致。于是我们需要定义一个损失函数,也有人称之为代价函数来度量这两者之间的“落差”程度。这个损失函数通常记作L(Y,Y') = L(Y,f(X)),为了方便起见,这个函数的值为非负数(请注意:在这里我们大写Y和Y',分别表示的是一个输出值向量和期望值向量,它们分别包括多个不同对象的实际输出值和期望值)。
常见的损失函数有如下3类:
(1)0-1损失函数:
(2)绝对损失函数

(3)平方损失函数

损失函数值越小,说明实际输出和预期输出的差值就越小,也就说明我们构建的模型越好。
对于第一类损失函数,简单来说,达到目标了,输出为0(没有落差),没有达到输出1(仍需努力)。
对于第二类损失函数更具体,避免正负值干扰,干脆取一个绝对值。
对于第三类函数,同样达到了避免正负值干扰,但是为了计算方便(主要是为了求导),通常还会在前面加一个“1/2”,这样求导,系数就可以变为“1”了:
当然,为了计算方便,还可以用对数损失函数,这样做的目的,主要是便于使用最大似然估计的方法来求极值。
损失函数的作用是可以用它反向配置网络中的权值,让损失最小。神经网络学习的本质,就是利用“损失函数”,来调节网络中的权重。
总体来说,有两大类方法比较好使,第一种方法就是“误差反向传播(简称BP)”。简单来说,就是首先随机设定初值,然后计算出当前网络的输出,然后根据网络输出与预期输出之间的差值,采用迭代的算法,反方向地去改变前面各层的参数,直至网络收敛稳定。
BP反向传播算法十分好用,直接把纠错的运算量,降低到只和神经元数目本身成正比的程度。但是实际应用起来,有很多问题,比如,在一个层次较多的网络中,当它的残差反向传播到最前面的层(即输入层),其影响已经变得十分小,甚至出现梯度扩散,严重影响训练精度。
其实,这也是容易理解的。因为在“信息论”中有个信息逐层缺失的说法,就是说信息在逐层处理时,信息量是不断减少的。例如,处理A信息而得到B,那么B所带的信息量一定是小于A的。这个说法,再往深层次的探寻,那就是信息熵的概念了。推荐读者阅读一部影响我世界观的著作《熵:一种新的世界观》。
根据热力学第二定律我们知道,能量虽然可以转化,但是无法100%利用。在转化过程中,必然会有一部分能量会被浪费掉。这部分无效的能量,就是“熵”。把“熵”的概念,迁移到信息理论,它就表示“无序的程度”。
当一种形式的"有序化(即信息)",转化为另一种形式的"有序化",必然伴随产生某种程度上的"无序化(即熵)"[6]。依据这个理论,当神经网络层数较多时(比如说大于7层),BP反向传播算法中“误差信息”,就会慢慢“消磨殆尽”,渐渐全部变成无序的“熵”,因此就无法指导神经网络的参数调整了。
再后来,第二类改进方法就孕育而生了。它就是当前主流的方法,也就是“深度学习”常用的“逐层初始化”(layer-wise pre-training)训练机制[7],不同于BP的“从后至前”的训练参数方法,“深度学习”采取的是一种从“从前至后”的逐层训练方法。
小结
首先,我们讲解了如何利用多层神经网络搞定“异或”问题的方法,然后我们讲解了多层前馈神经网络和损失函数的概念。
在下一讲中,我们将用图文并茂的方式,详细讲解BP算法和梯度递减的概念,特别是这个“梯度递减”概念,它还会深深影响“深度学习”算法。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号