计算机控制技术期末复习总结
计算机控制技术期末复习总结
1. 绪论
- 计算机控制系统的典型形式
- 直接数字控制系统(DDC)
- 监督控制系统(SCC)
- 分散型控制系统(DCS)
- 现场总线控制系统(FCS)
- 数据采集和监视系统
- 计算机控制系统的设计方法
- 连续域设计——离散化
- 直接数字域设计方法
习题
1、什么是计算机控制?什么是计算机控制系统?它由哪几本部分组成的?
- 计算机控制系统是计算机技术与自动控制理论、自动化技术以及检测与传感技术、通信与网络技术紧密结合的产物。
- 计算机控制系统就是利用计算机来实现生产过程自动控制的系统。
- 计算机控制系统由硬件和软件两部分组成。
2、简述计算机系统各部分的作用?
计算机控制系统由硬件和软件两部分组成
- 硬件包括:
- 计算机系统:主机和外部设备
- 过程输入输出通道:输入输出通道及接口
- 被控对象:所要控制的生产装置及设备
- 执行器:电动、气动、液压三种执行机构
- 检测变送环节:传感器和测量线路组成
- 软件包括:
- 系统软件:计算机的制造厂商提供的,方便用户使用计算机的软件。如汇编语言、操作系统、数据库系统、开发系统等。
- 应用软件:设计人员针对生产过程而编制的控制和管理程序。如输入程序、控制程序、人机接口程序等。
3.简述计算机控制系统的特点及其信号的变换与传输过程
特点
在计算机控制系统中,被控制量通常是模拟量,而计算机本身的输入输出量都是数字量。因此,计算机控制系统大都具有数字—模拟混合式的结构
传输过程
模拟信号——>离散模拟信号——>数字信号——>离散模拟信号——>模拟信号
采样——>A/D转换器——>数字调节器——>D/A转换器——>保持器
补充说明:
模拟信号:时间上和幅值上都连续的信号
离散模拟信号:时间上离散幅值上连续的信号
数字信号:时间上离散,幅值也离散的信号
采样:将模拟信号抽样成离散模拟信号的过程
量化:采用一组数码来逼近离散模拟信号的幅值,将其转换成数字信号。
2. 第二章、线性离散系统的描述与分析
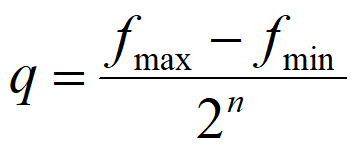
量化单位
n——2进制数字长
用数字量表示时,只能用量化单位q的整数倍表示
A/D转换器采用“有舍有入”的方法,小于q/2的舍去,大于q/2的进入,由此产生误差。
量化误差 e(t) = f(t) - f*(t)
量化误差小于等于q/2
降低量化误差的措施:加大字长n,增加A/D位数
采样频率:ωs(ω = 2π/T=2πf)至少应该是f(t)的最高频率F(jω)的两倍,即ωmax
ωs>=2ωmax
采样定理奠定了选择采样频率的理论基础,但对于连续对象的离散控制,不易确定连续信号的最高频率。因此,采样定理给出了选择频率的准则,在实际应用中还要根据系统的实际情况综合考虑
零阶保持器: 零阶保持器采用恒值外推原理,把每个采样值e(kT)一直保持到下一个采样时刻(k+1)T,从而把采样信号e*(kT)变成了阶梯连续信号eh(t)
数学表达式:
时域方程:
零阶保持器是一种近似的带通滤波器
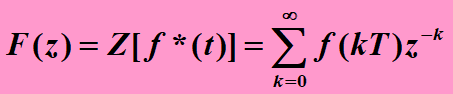
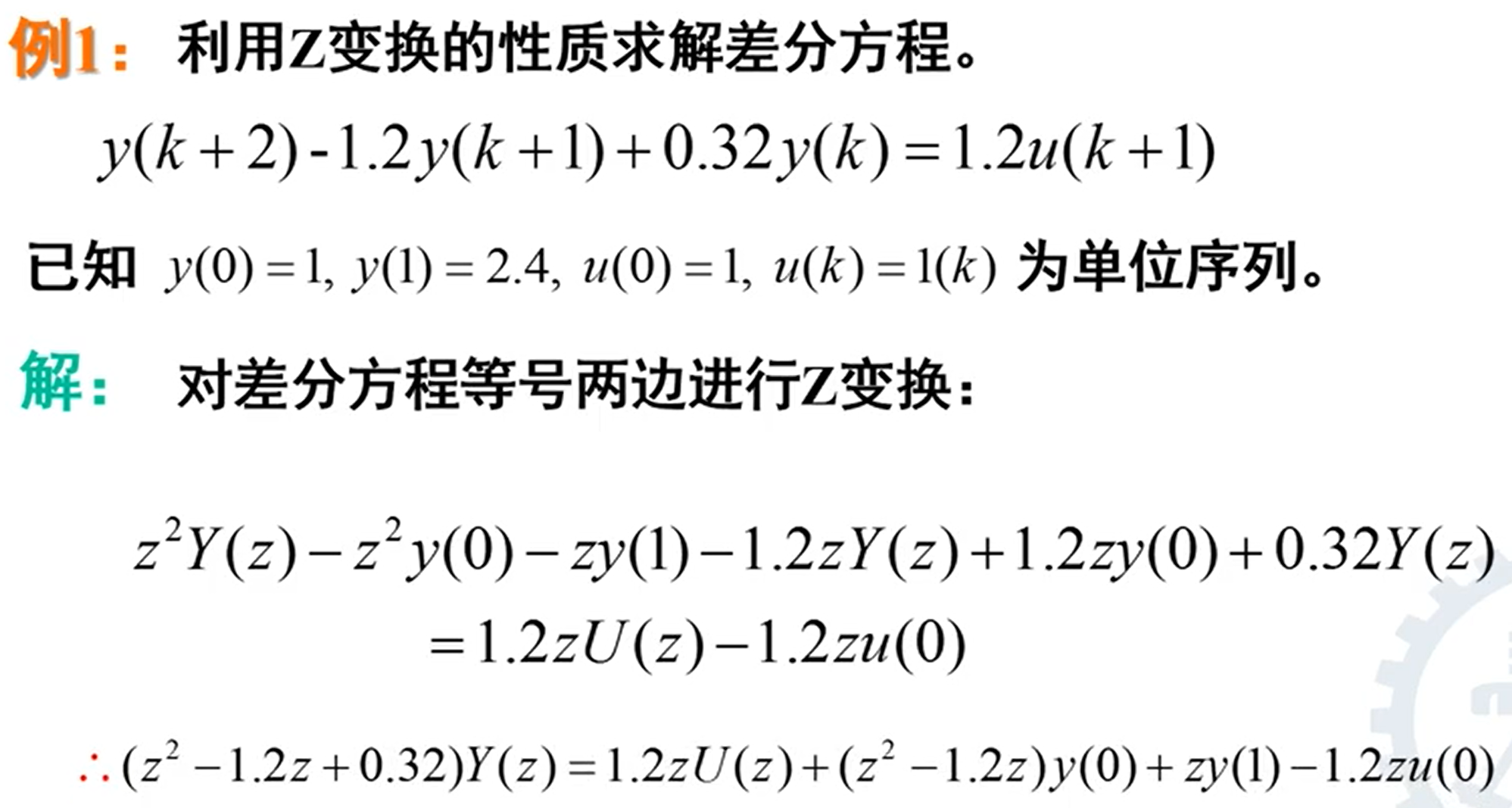
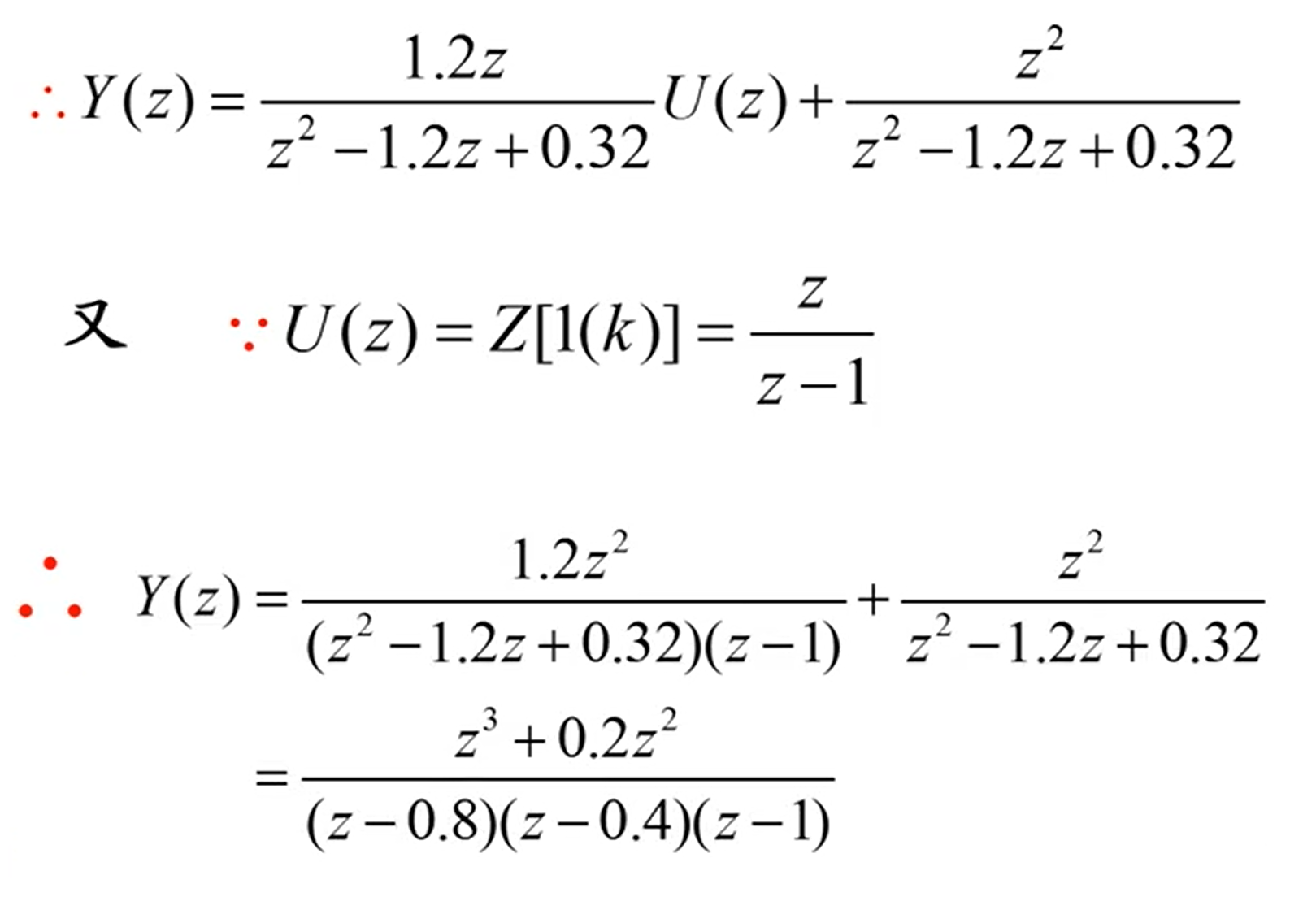
Z变换定义(差分方程与Z变换的方程关系)
![image-20220521201254341]()
![image-20220521204354998]()
![image-20220521204450260]()
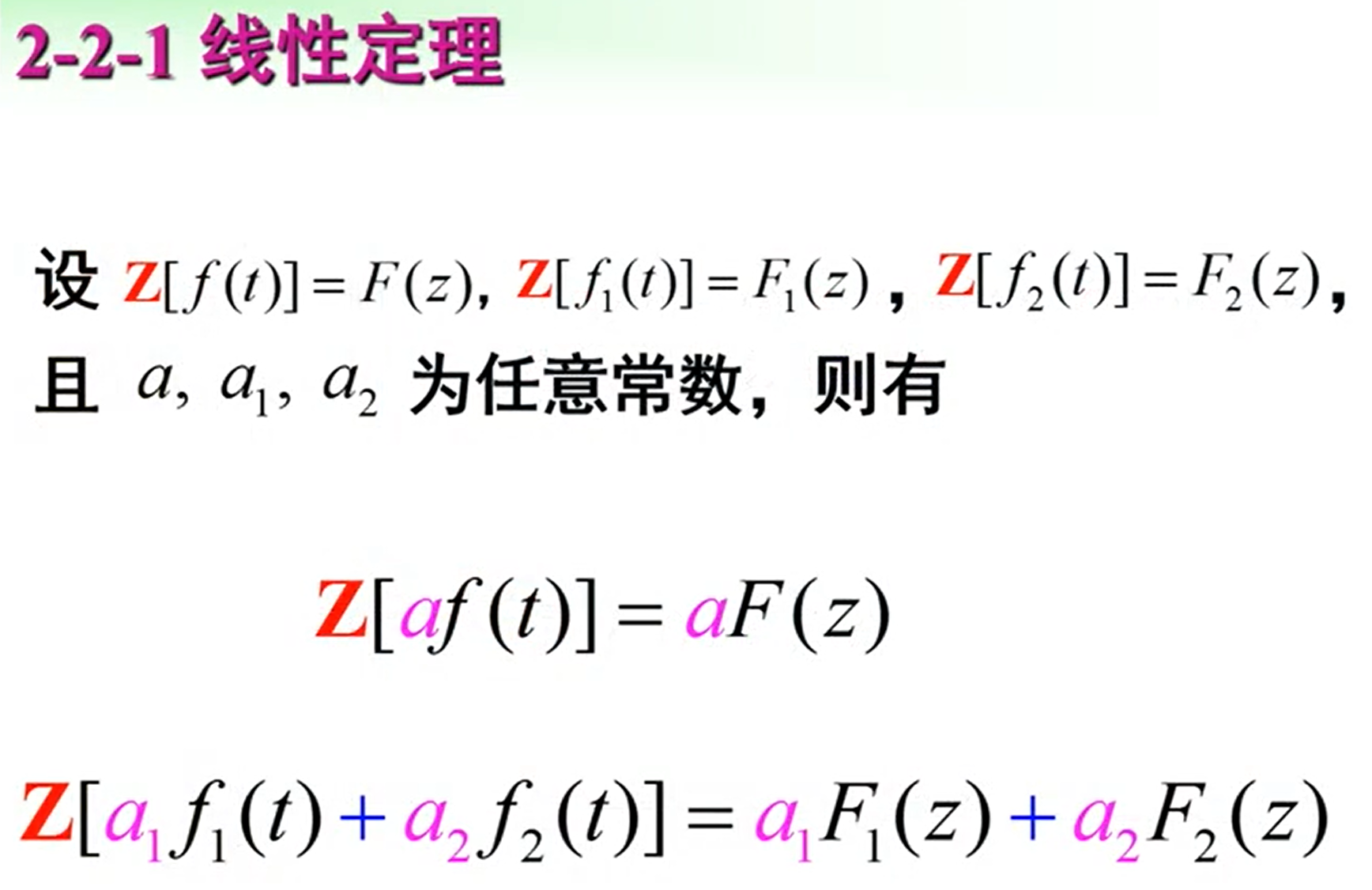
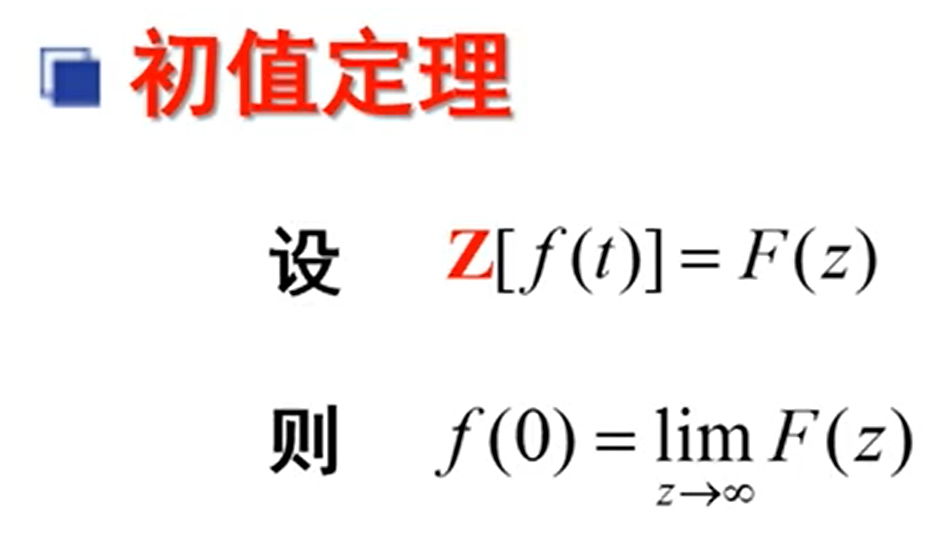
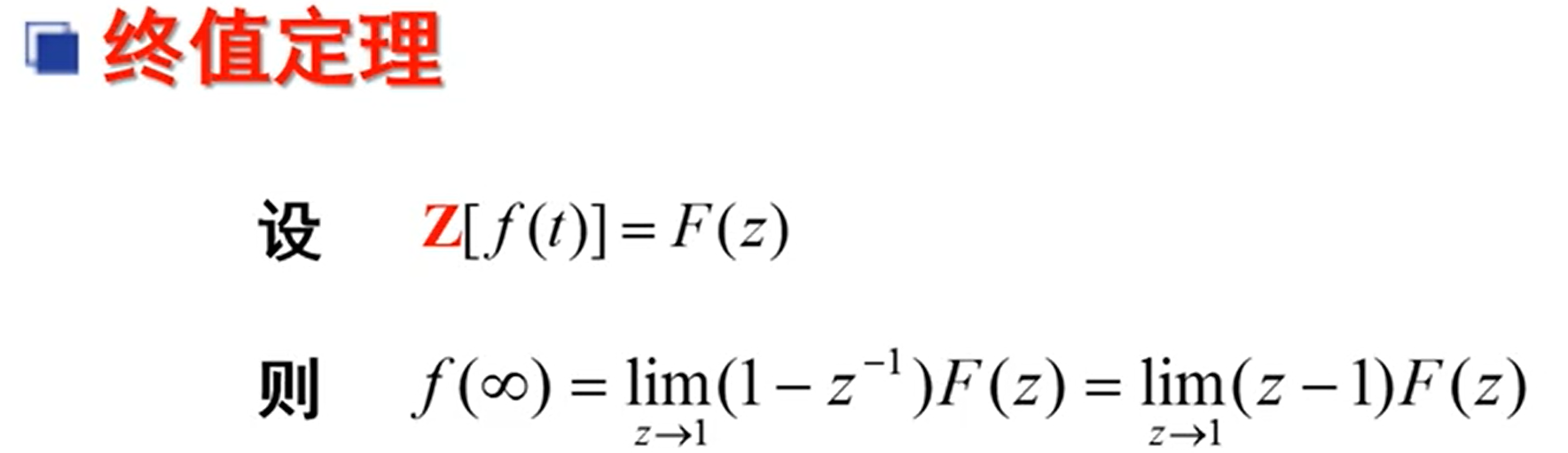
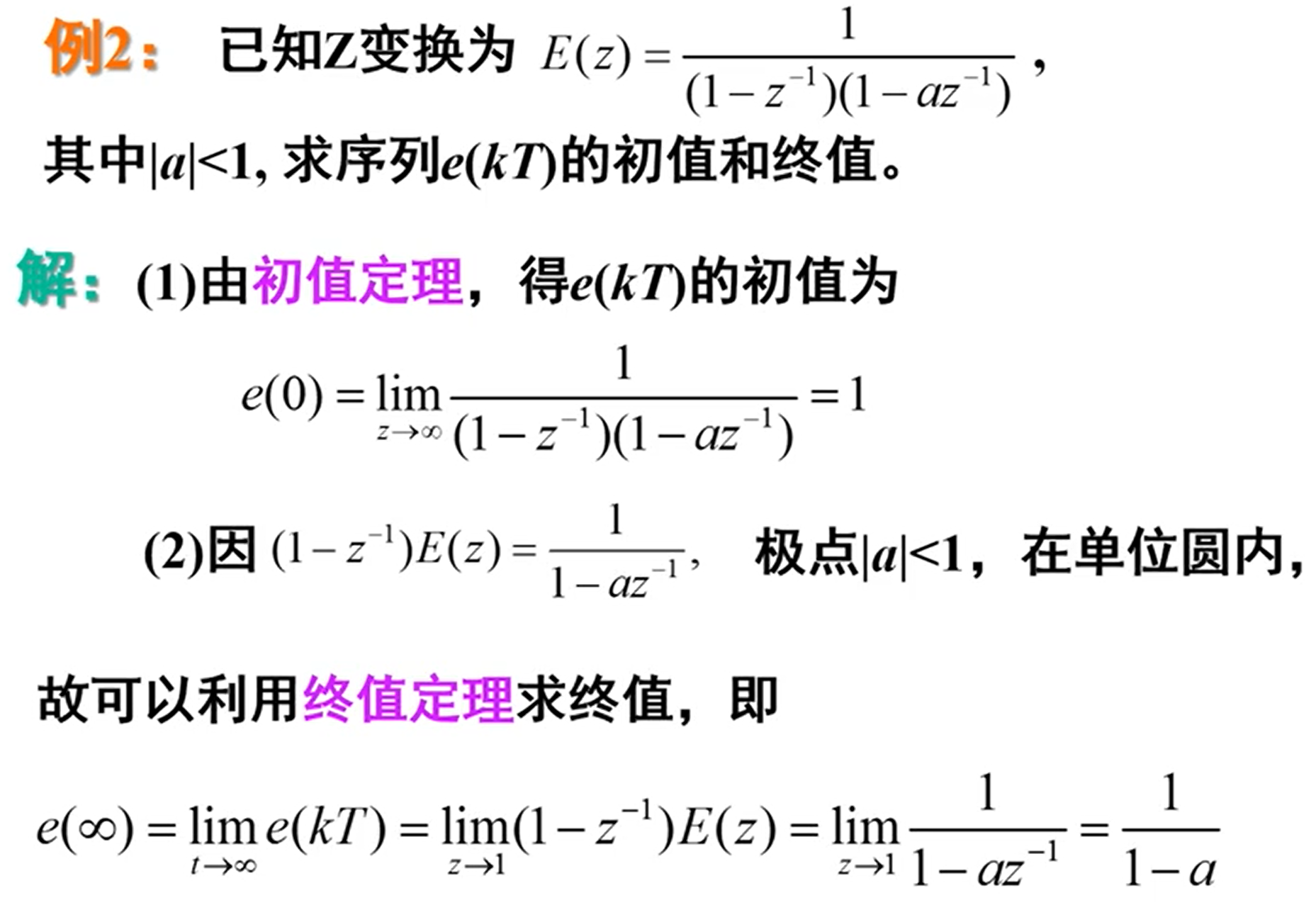
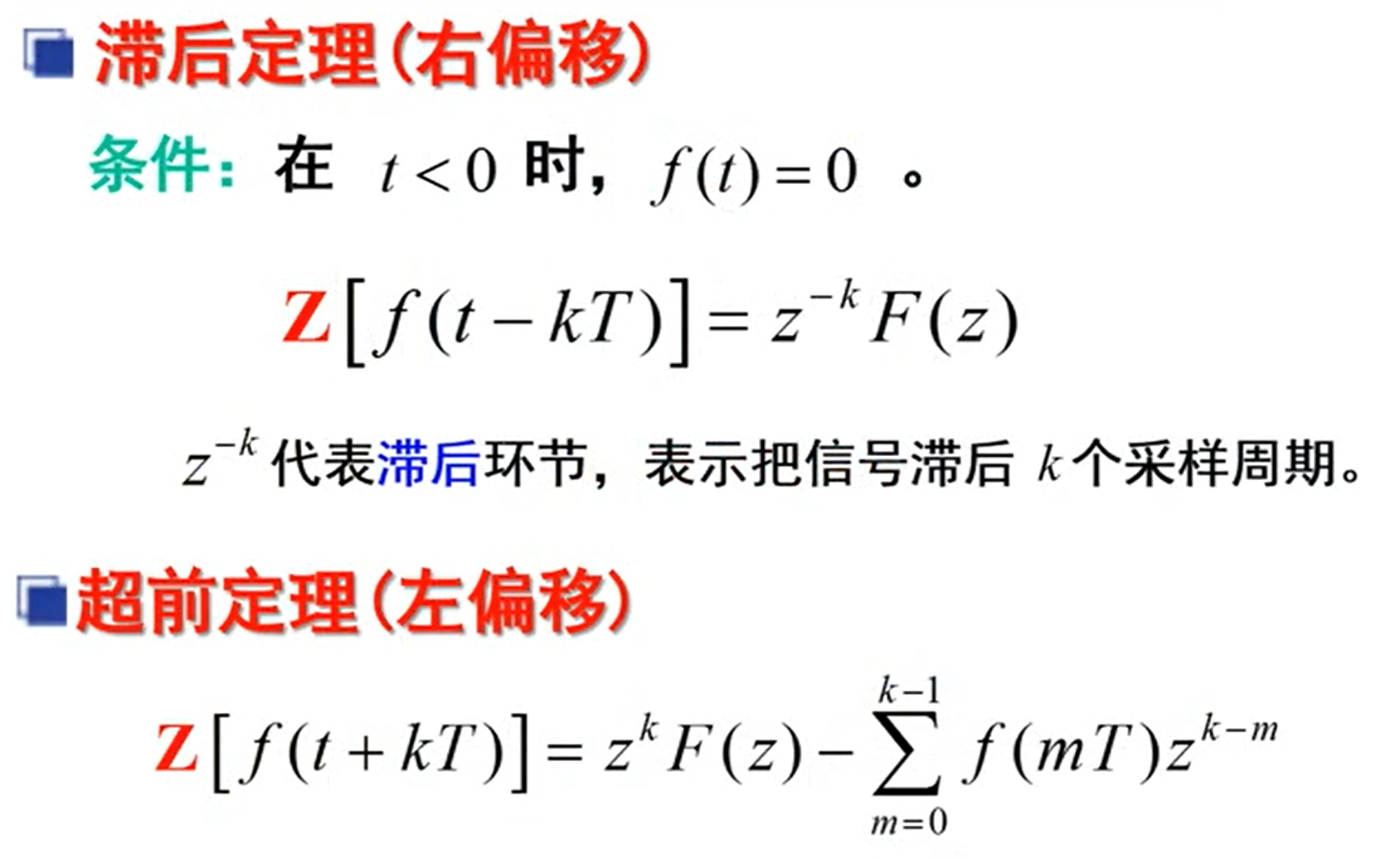
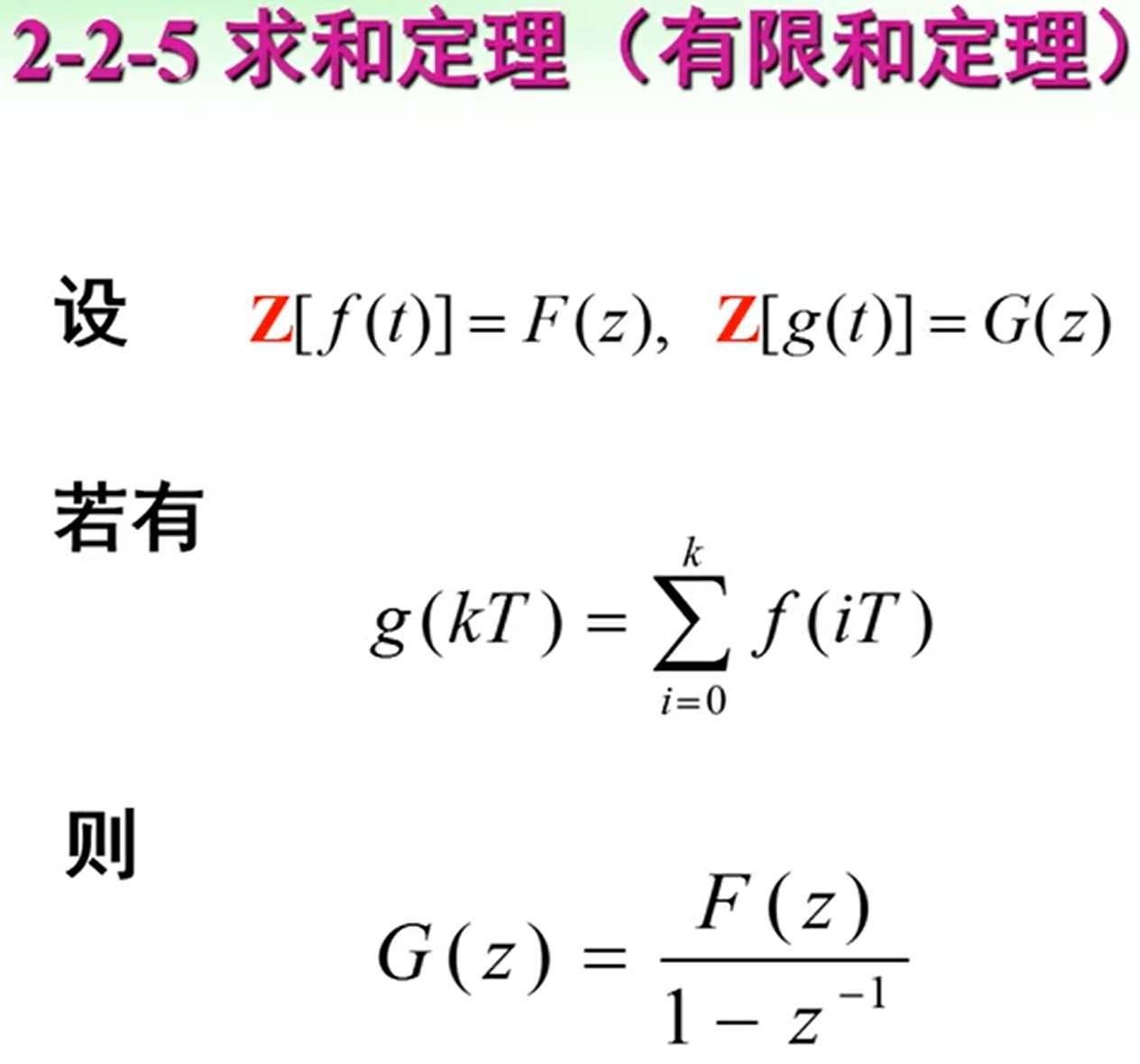
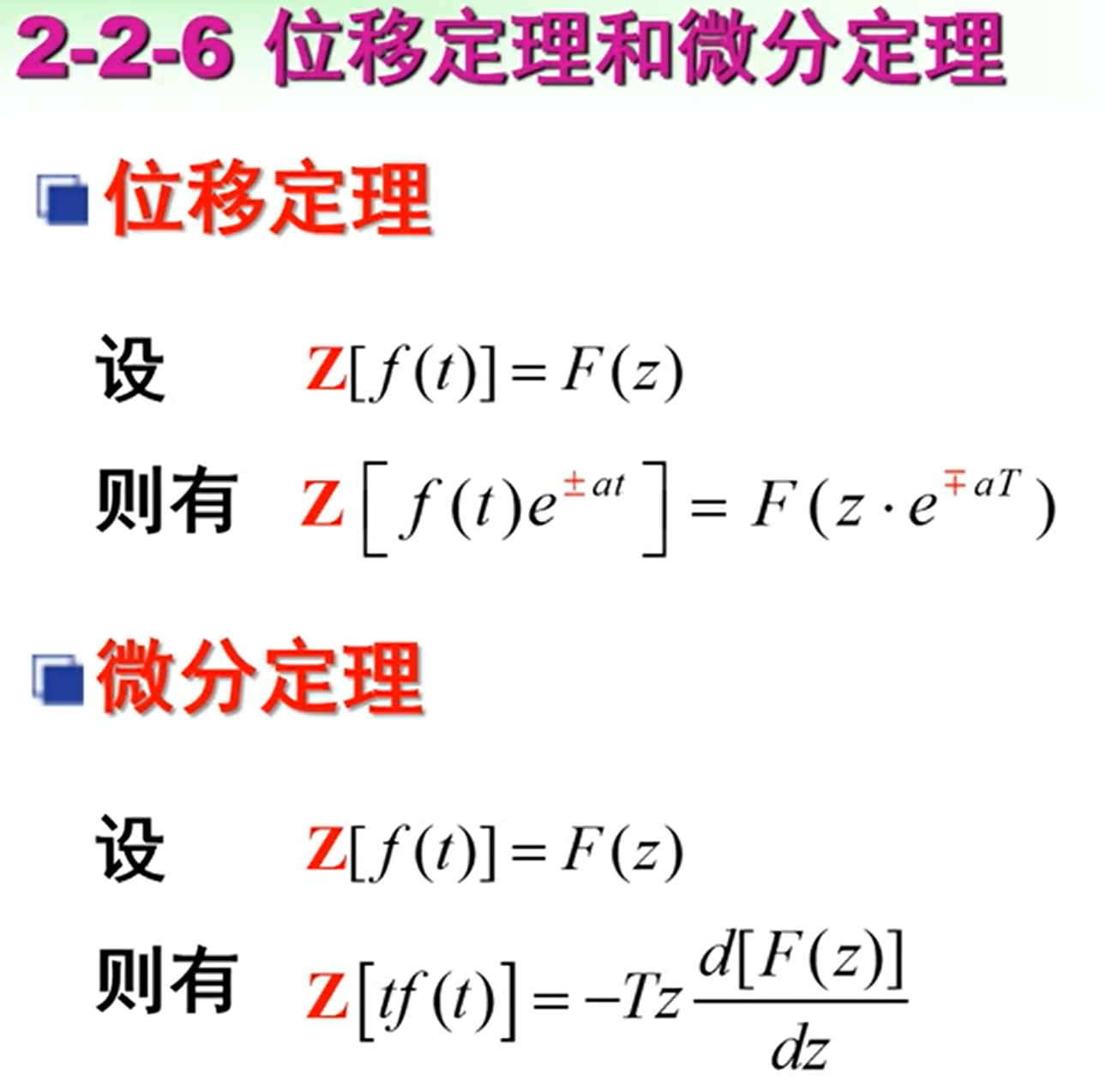
Z变换定理:
![image-20220521203517180]()
![image-20220521203232320]()
![image-20220521203419293]()
![image-20220521204659533]()
![image-20220521203144499]()
![image-20220521203850119]()
![image-20220521203752124]()
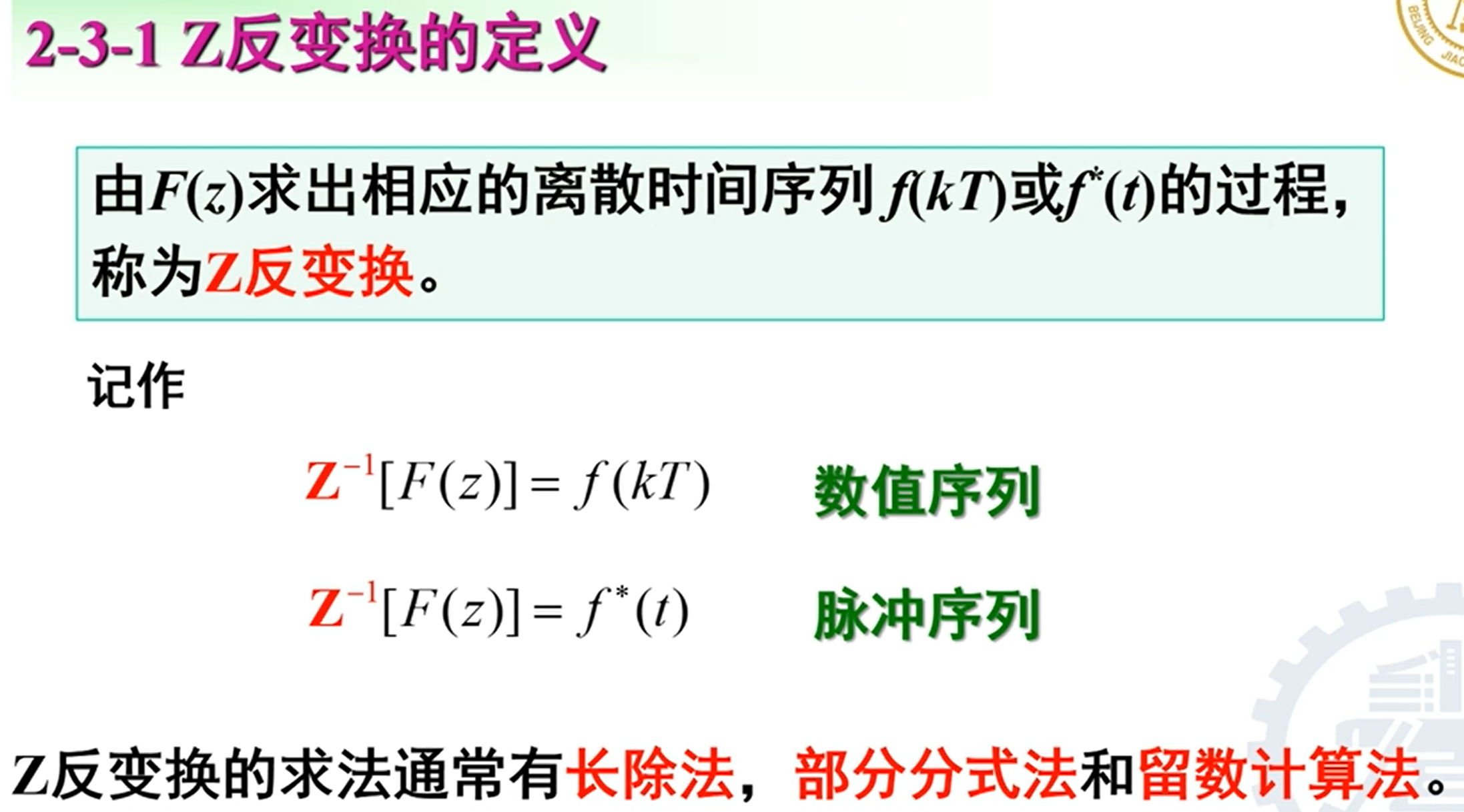
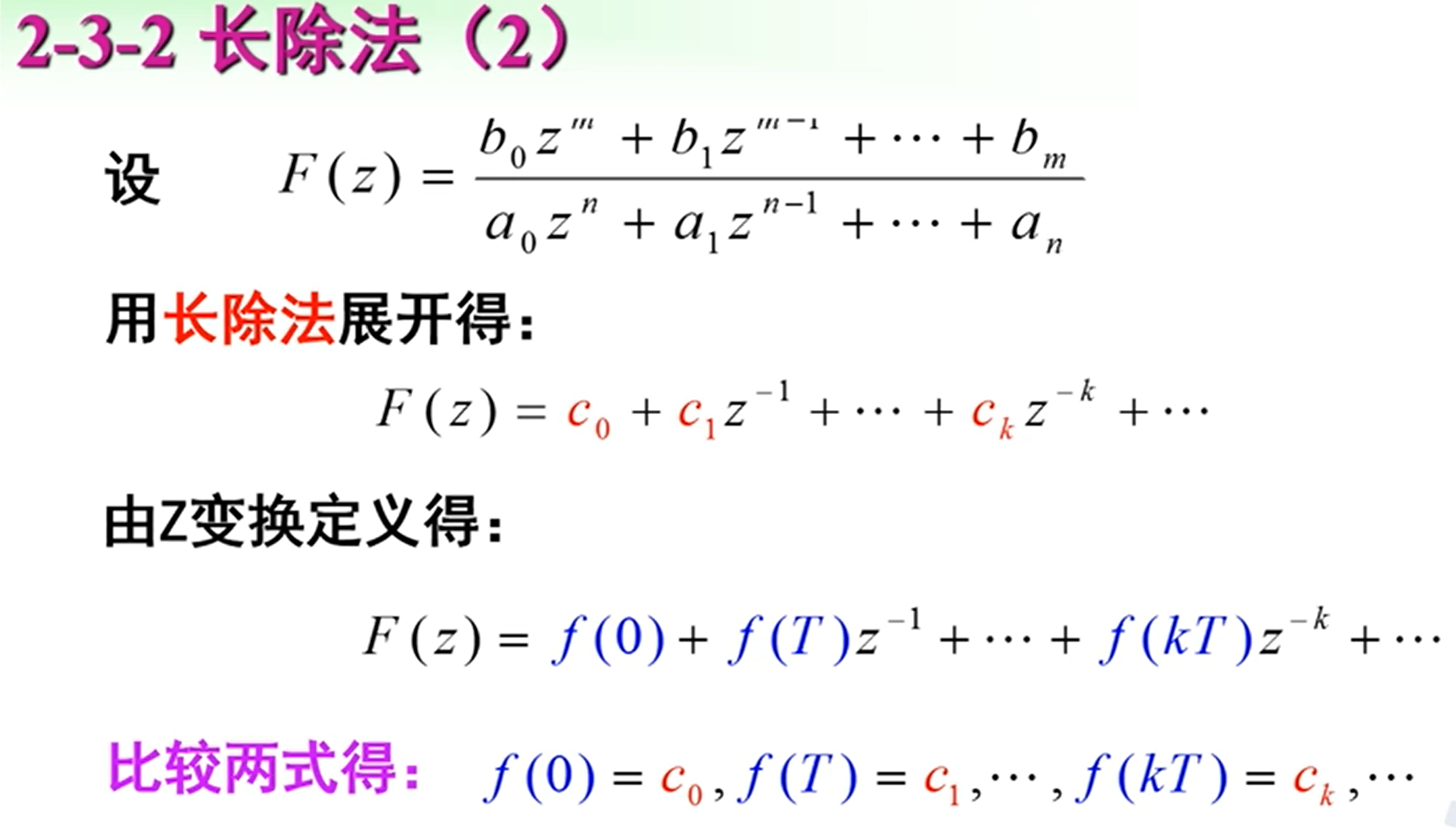
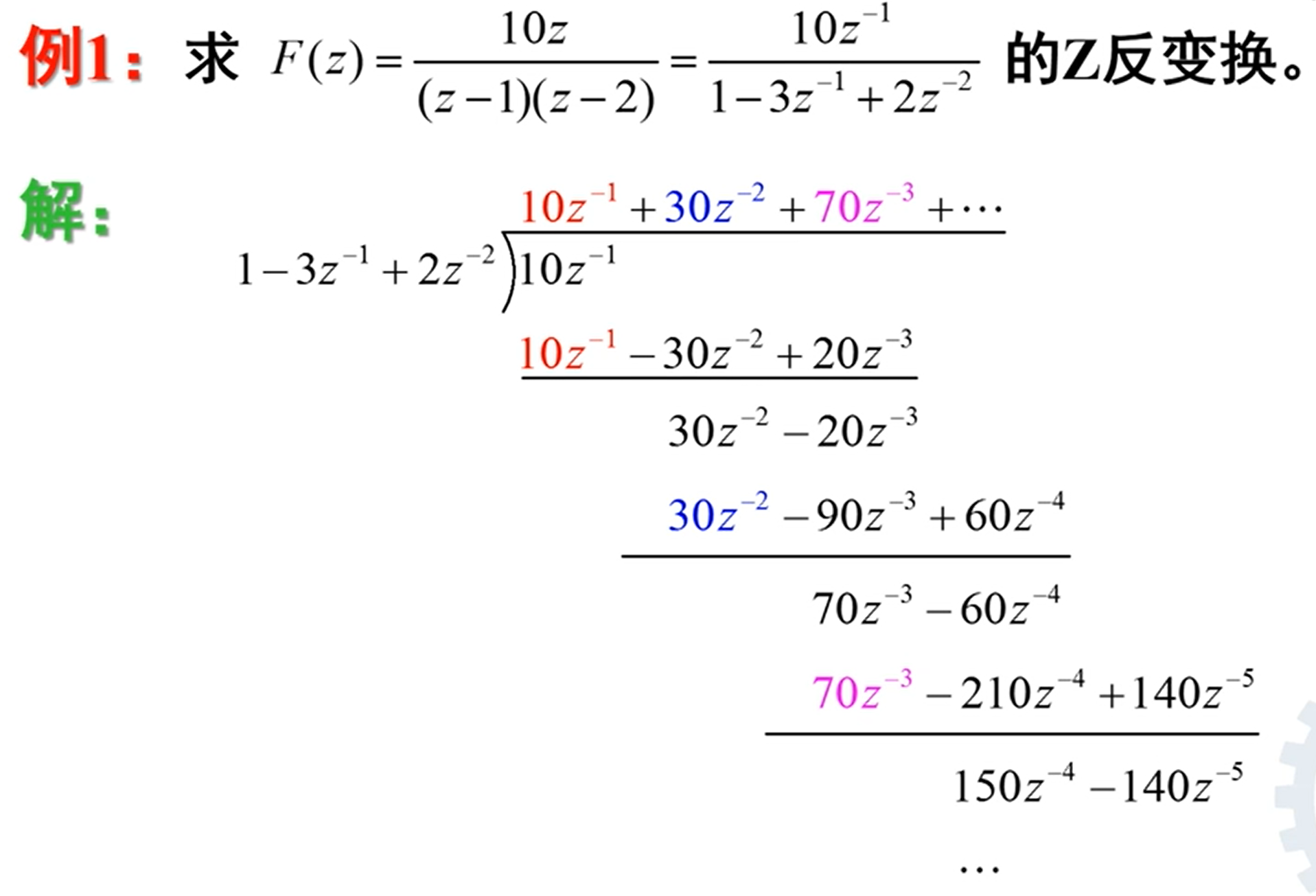
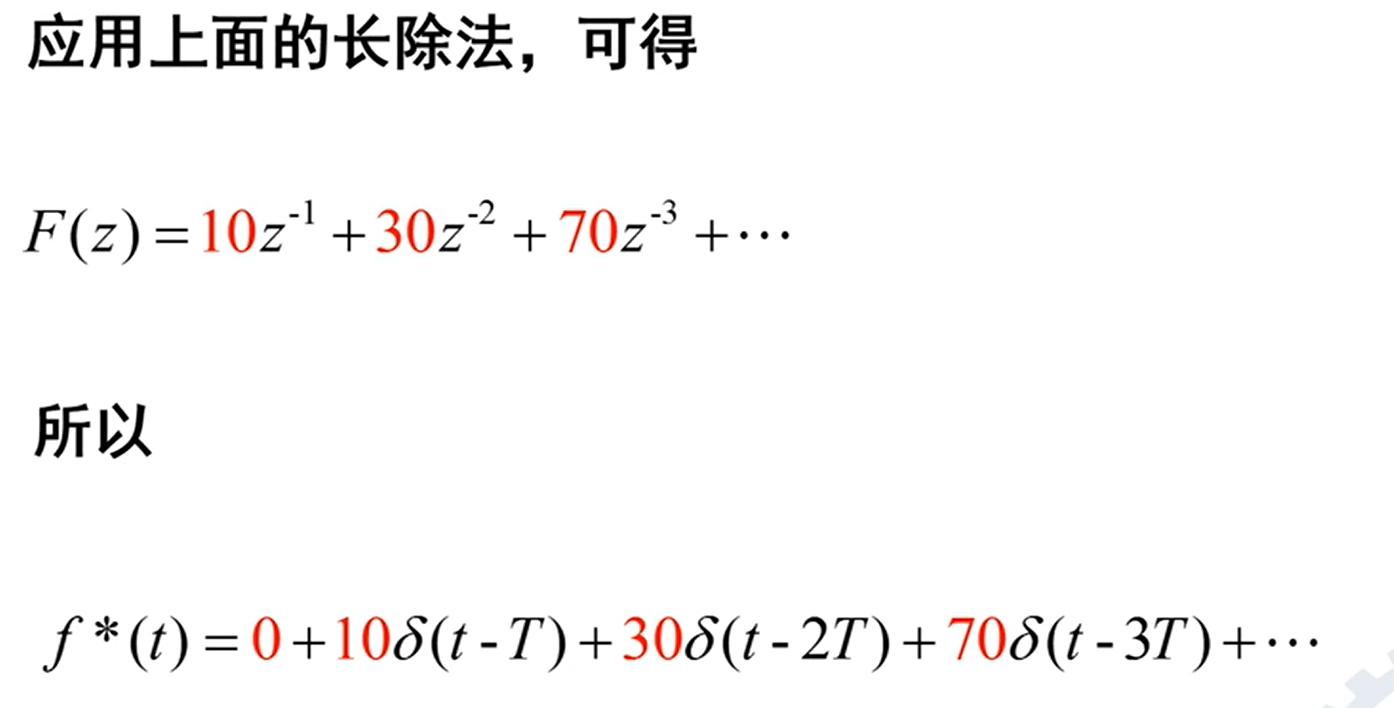
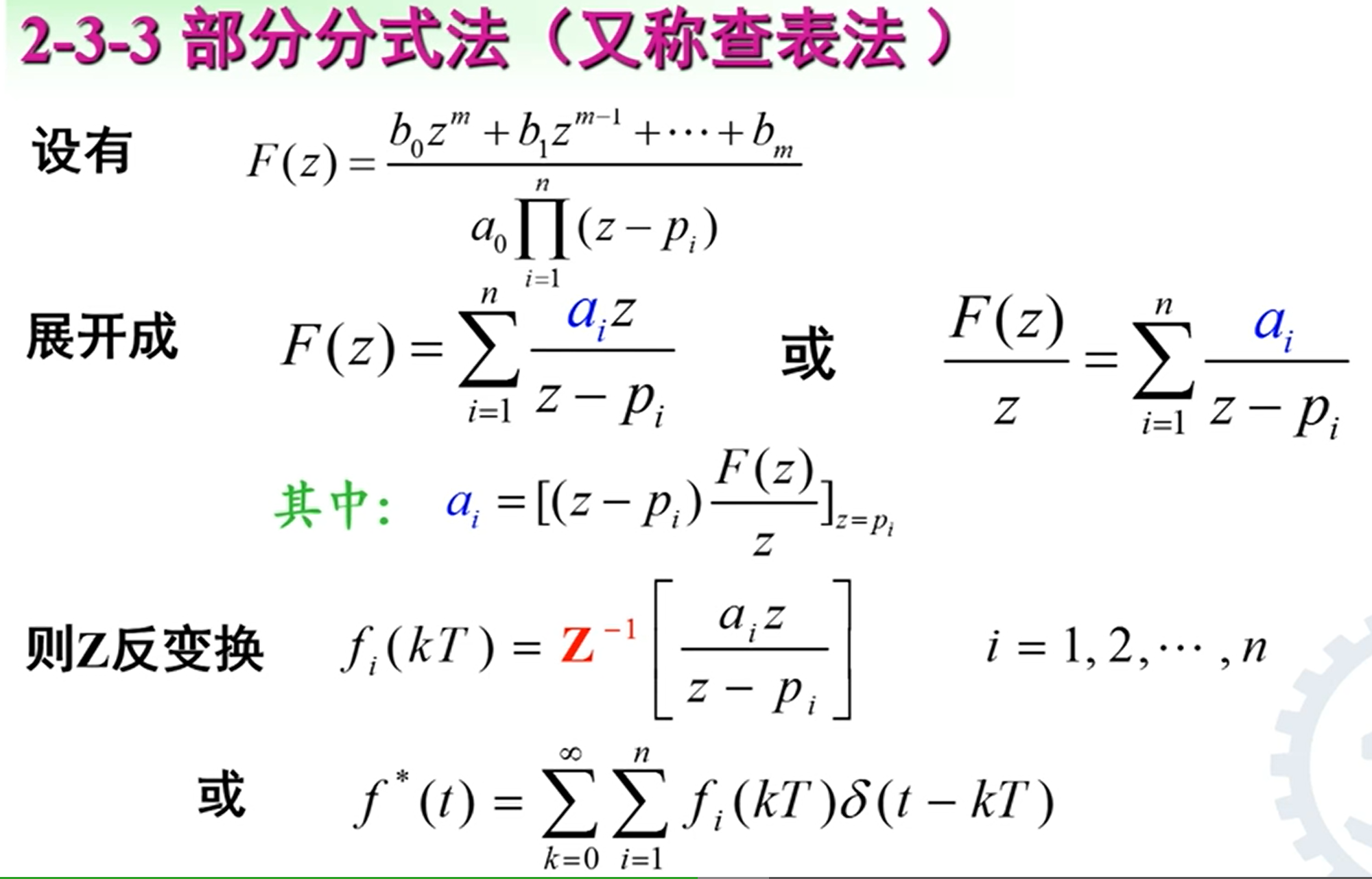
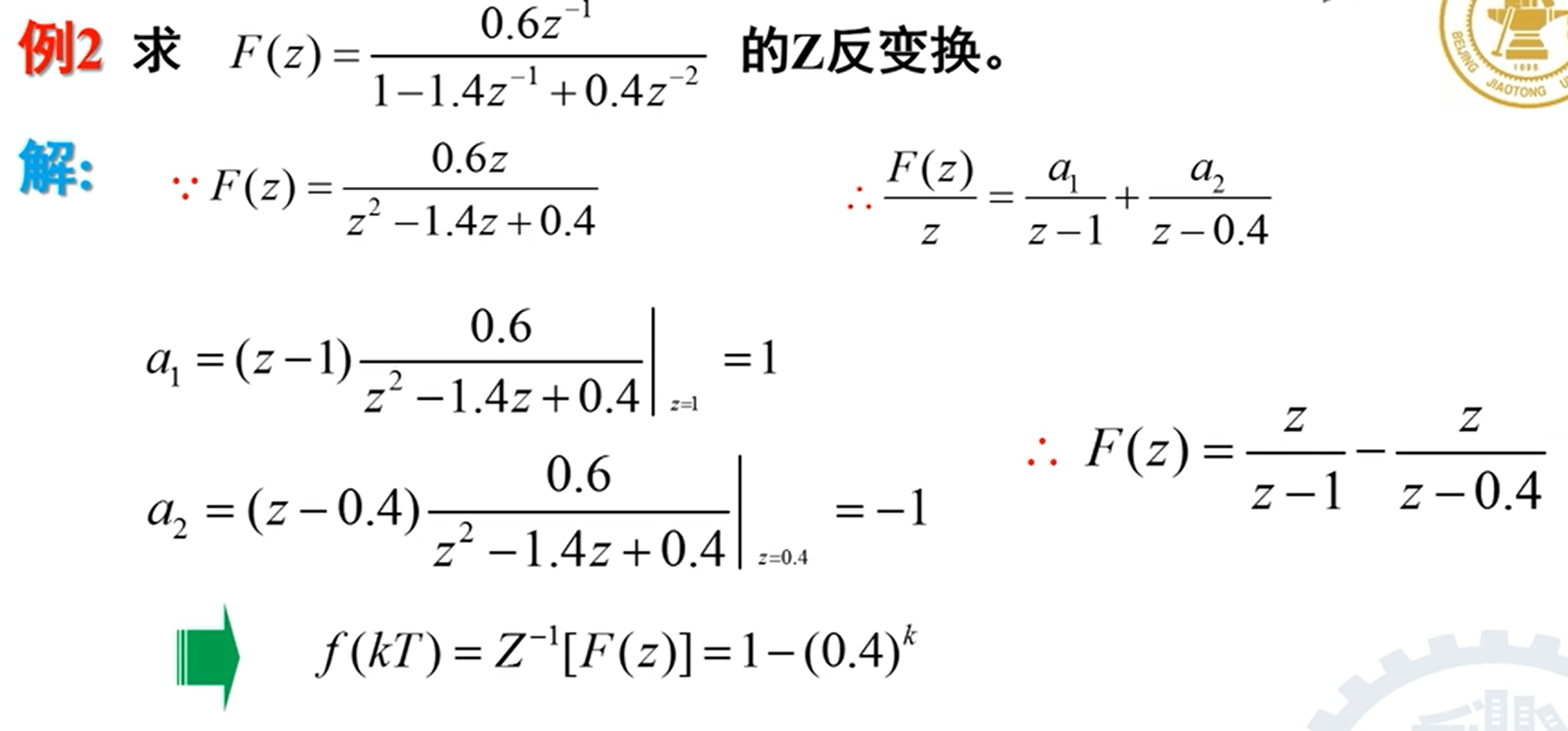
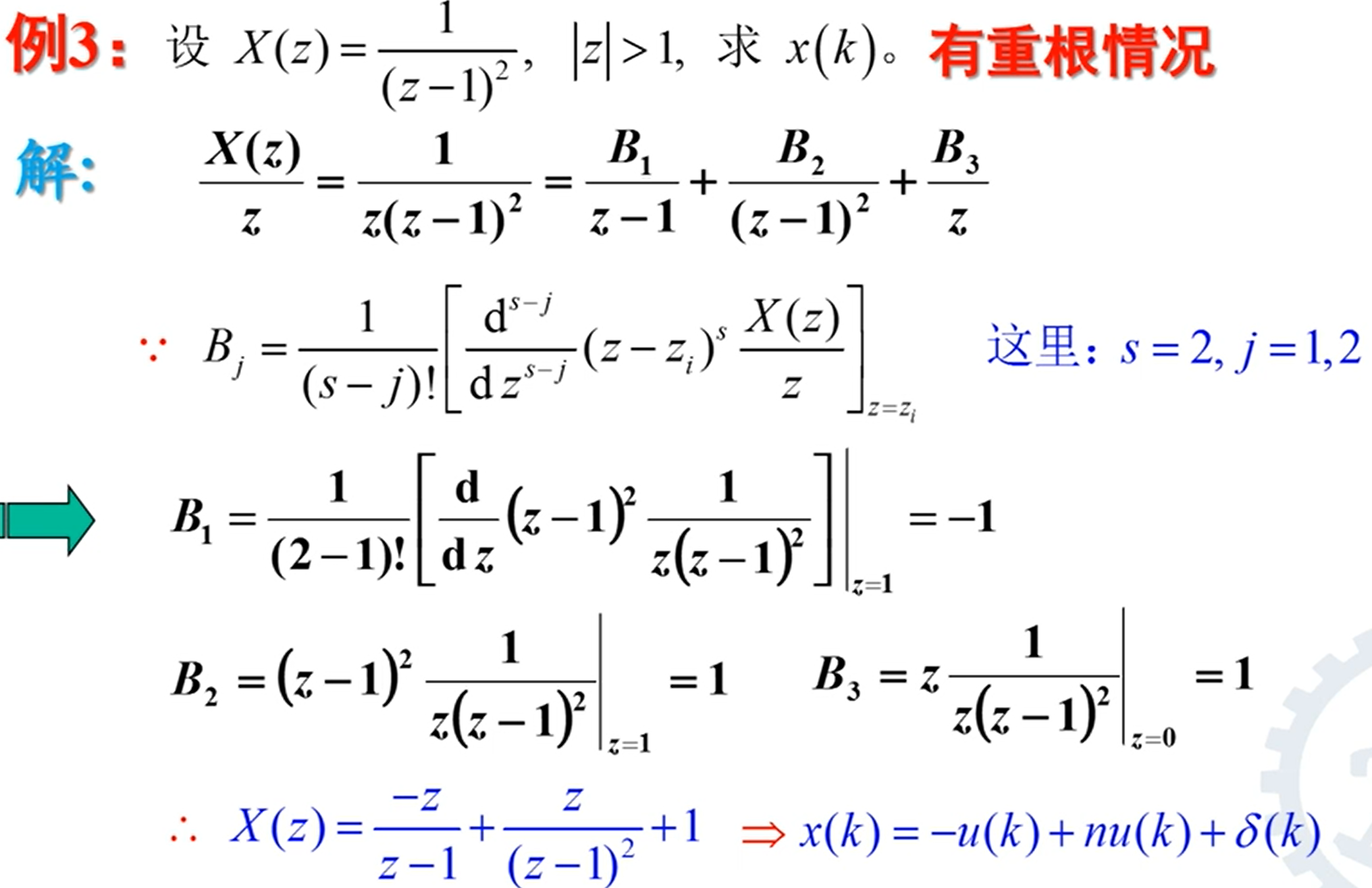
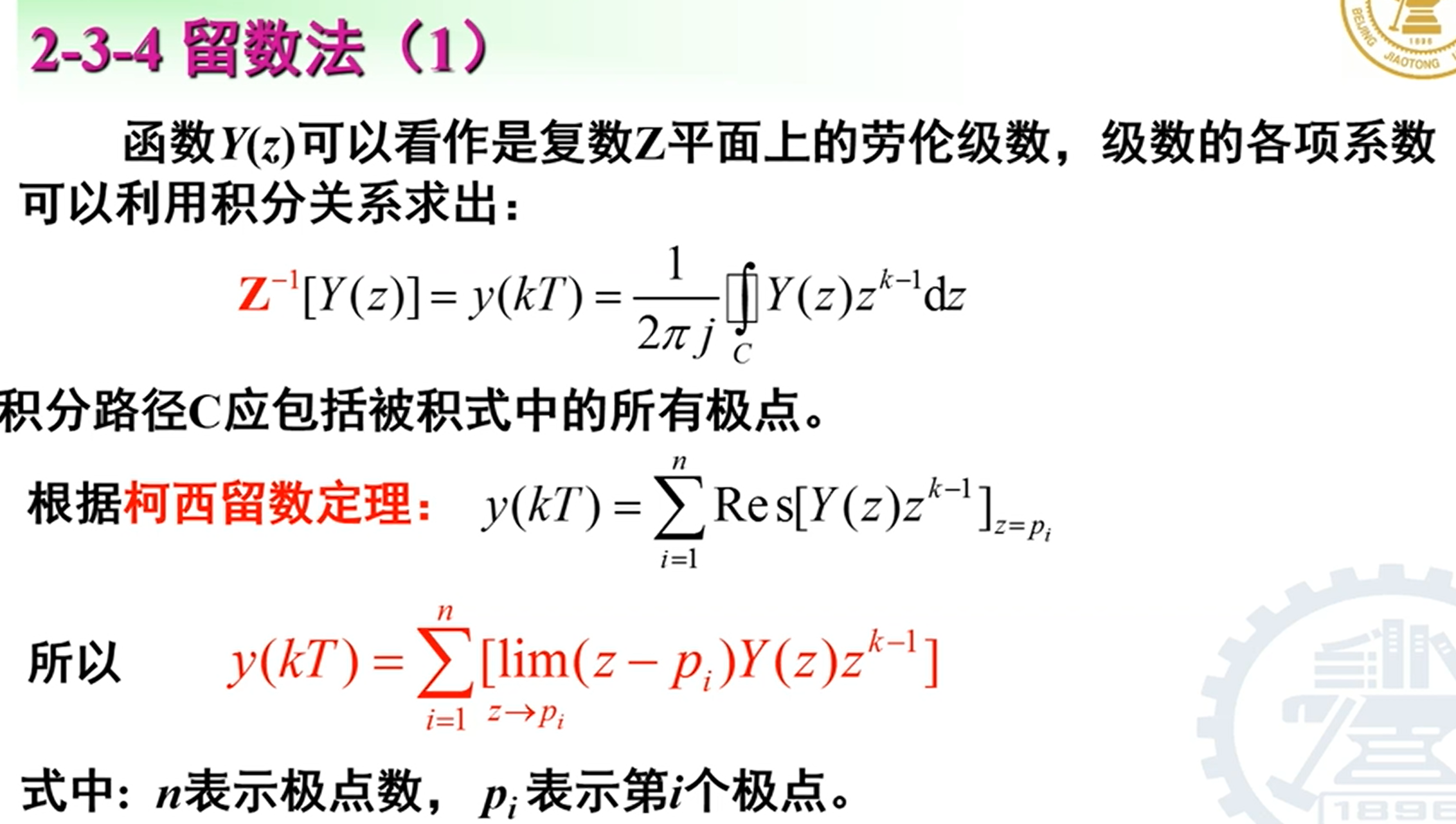
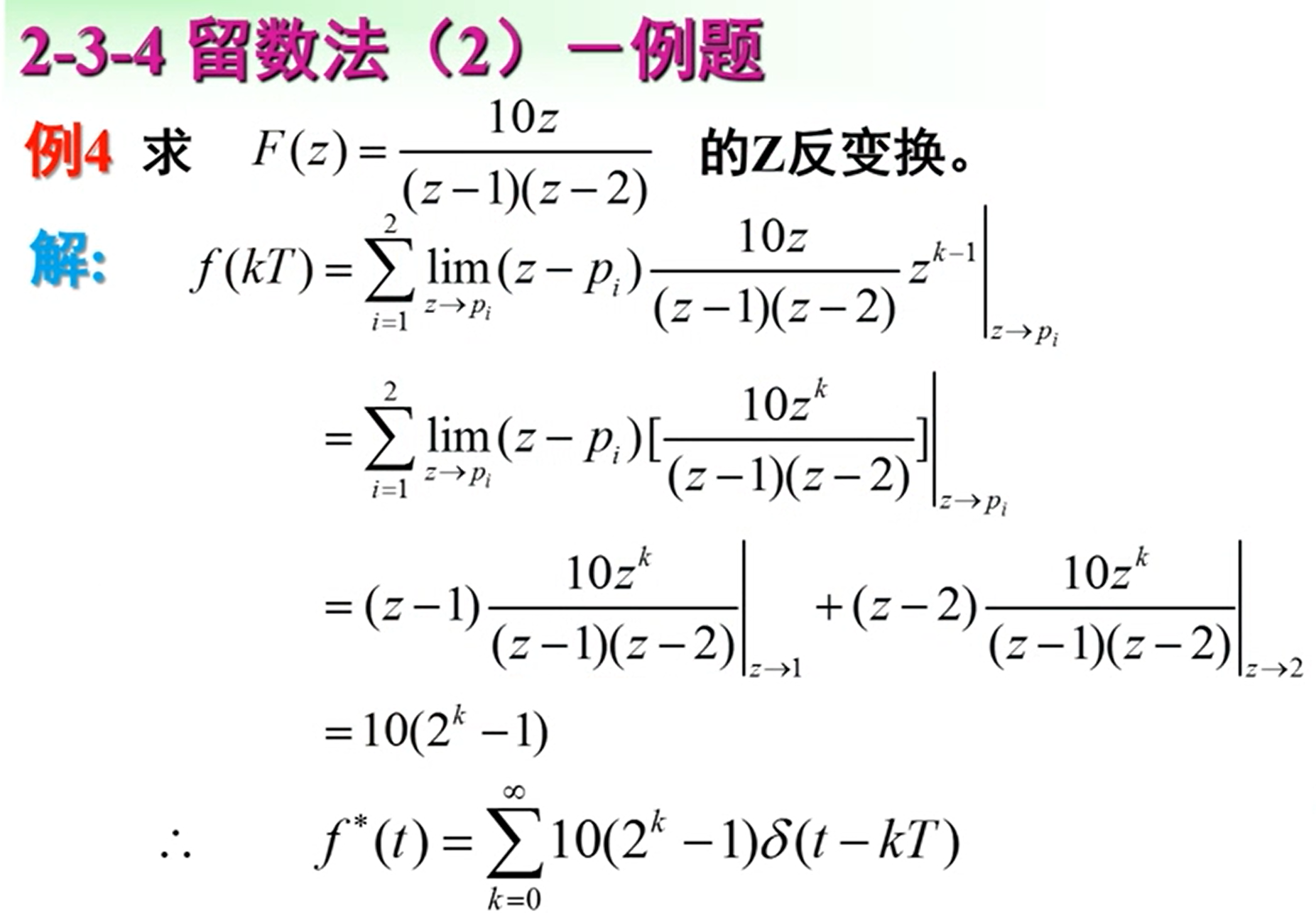
Z的反变换
![image-20220521205054586]()
![image-20220521205249902]()
![image-20220521205337683]()
![image-20220521205418352]()
![image-20220521205459064]()
![image-20220521205639616]()
![image-20220521205742919]()
![image-20220521205847526]()
![image-20220521205937436]()
![image-20220521210122276]()
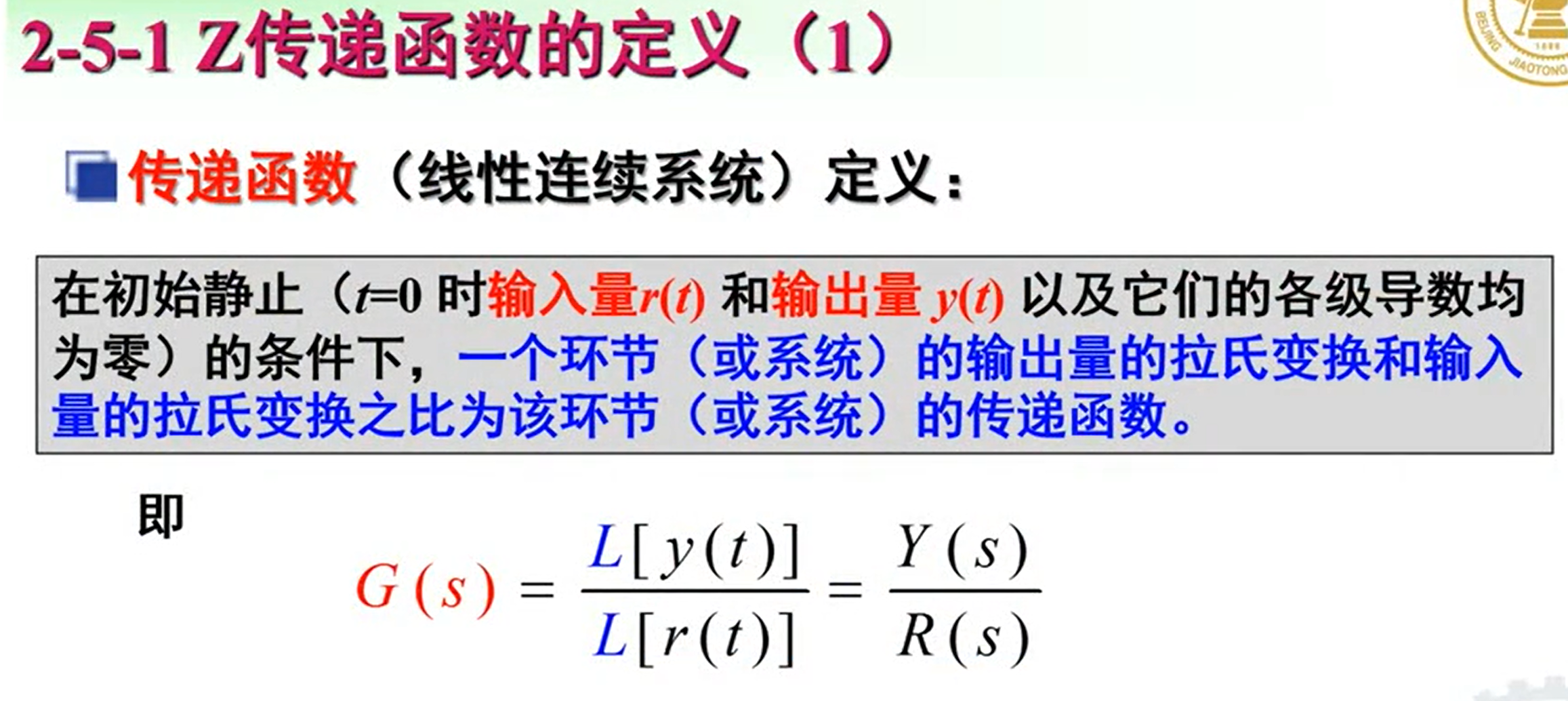
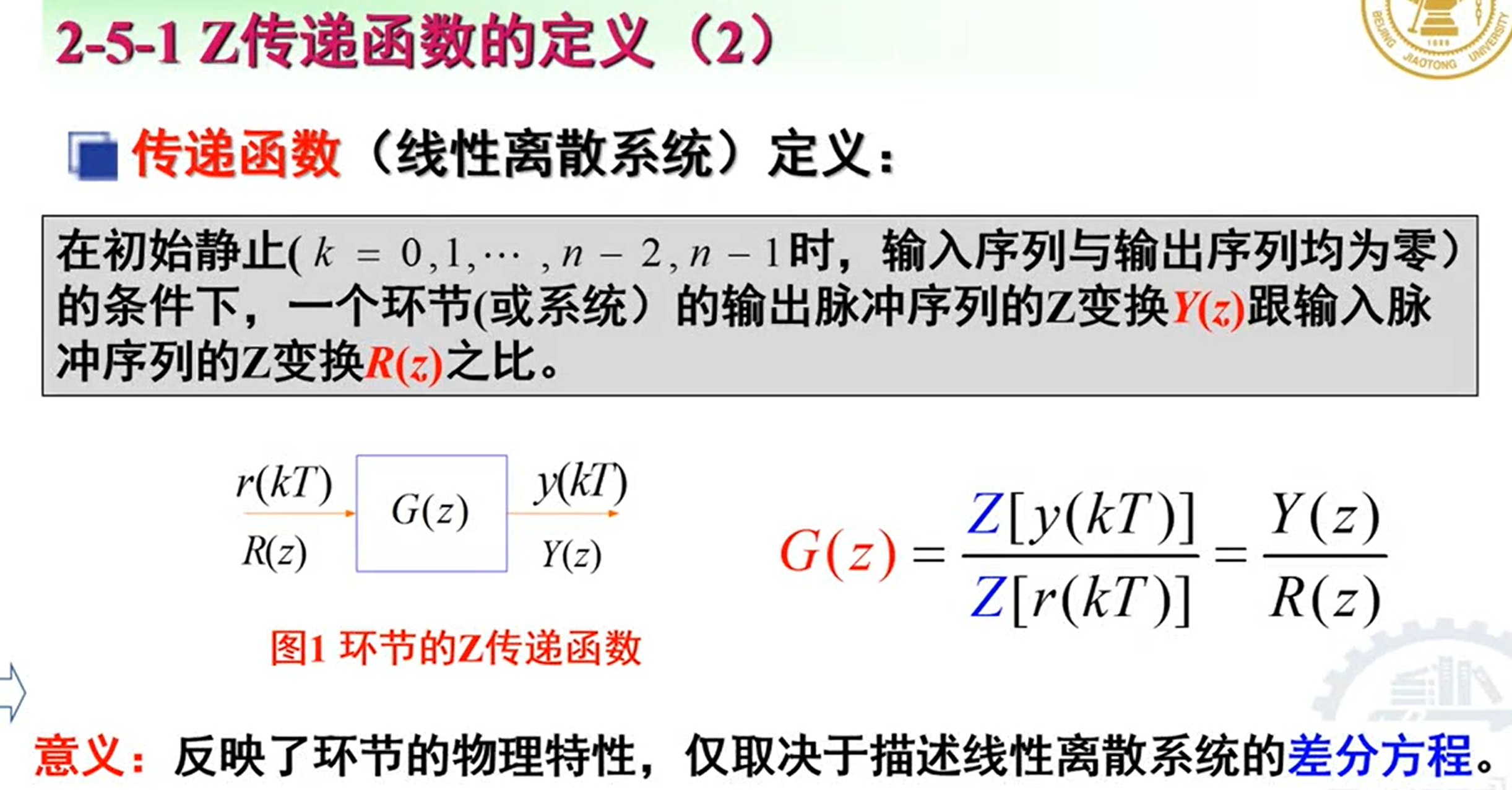
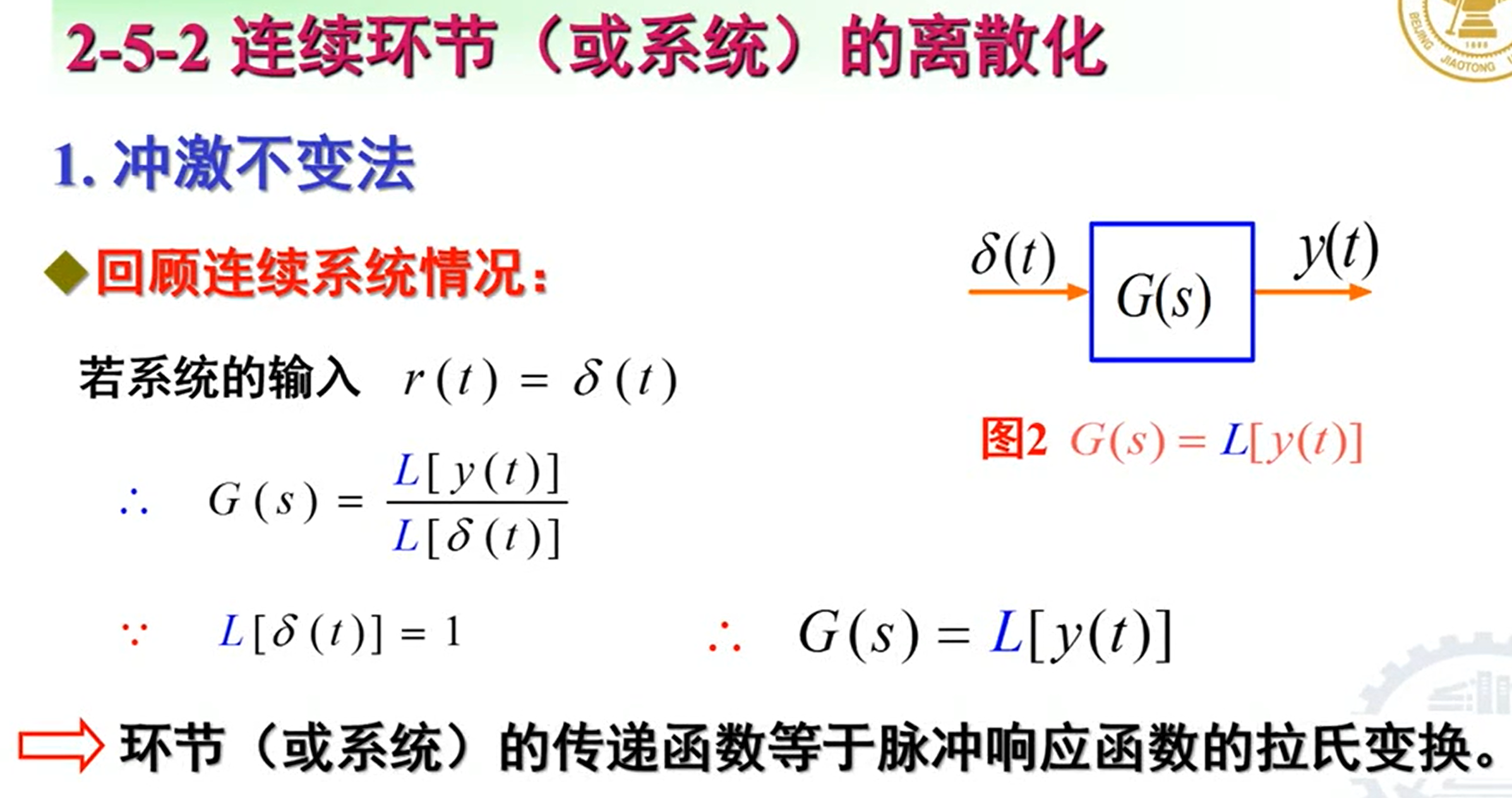
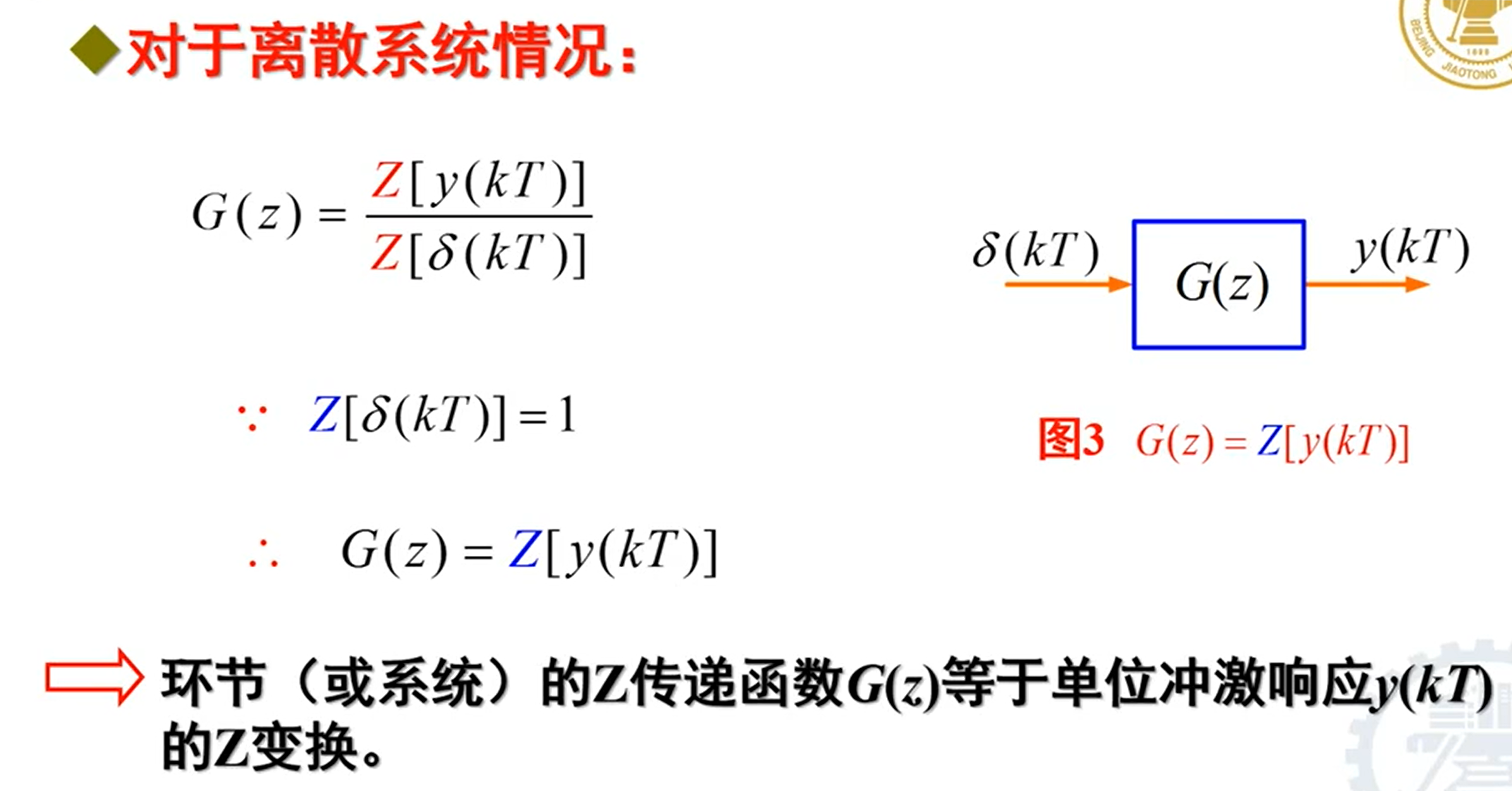
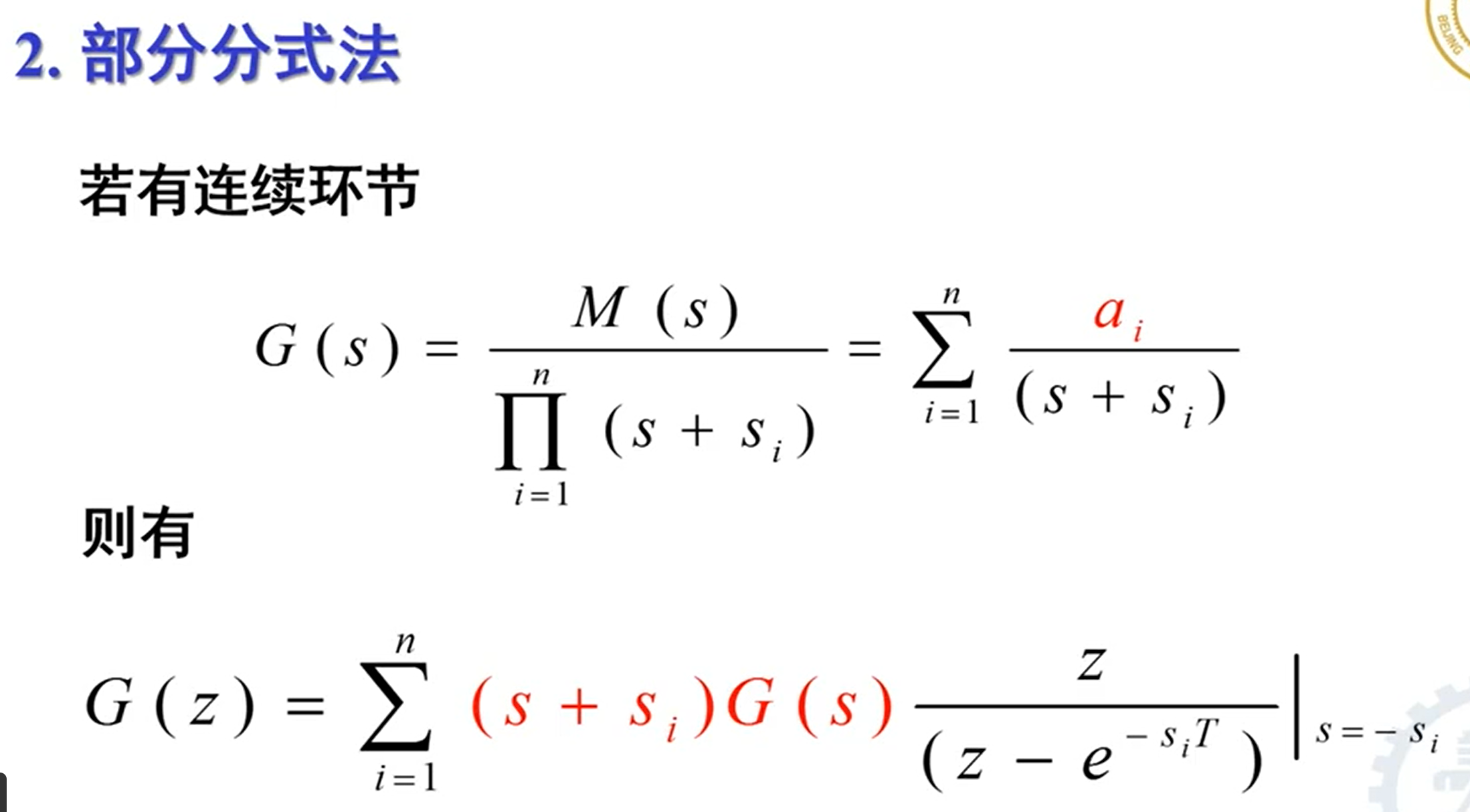
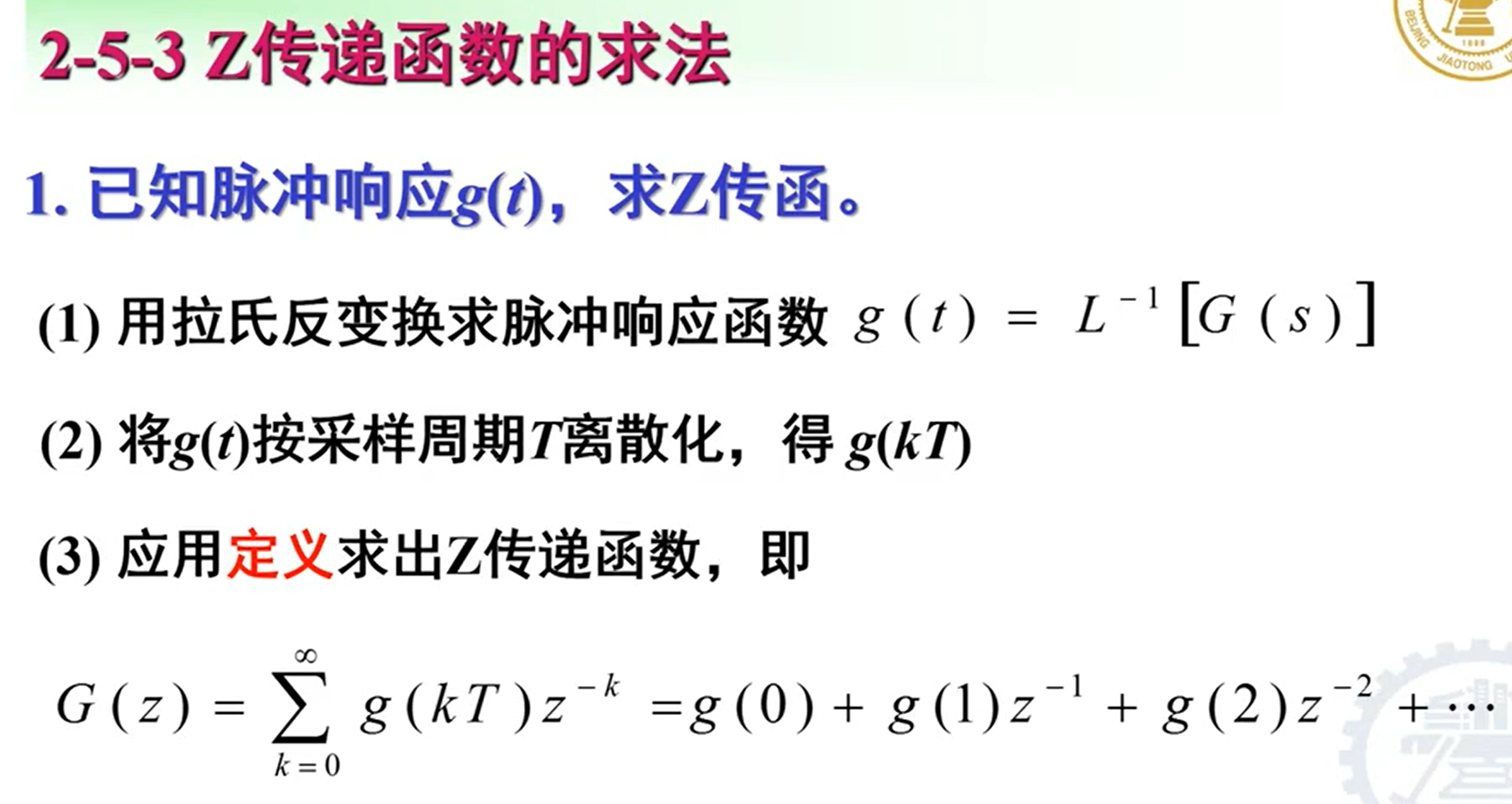
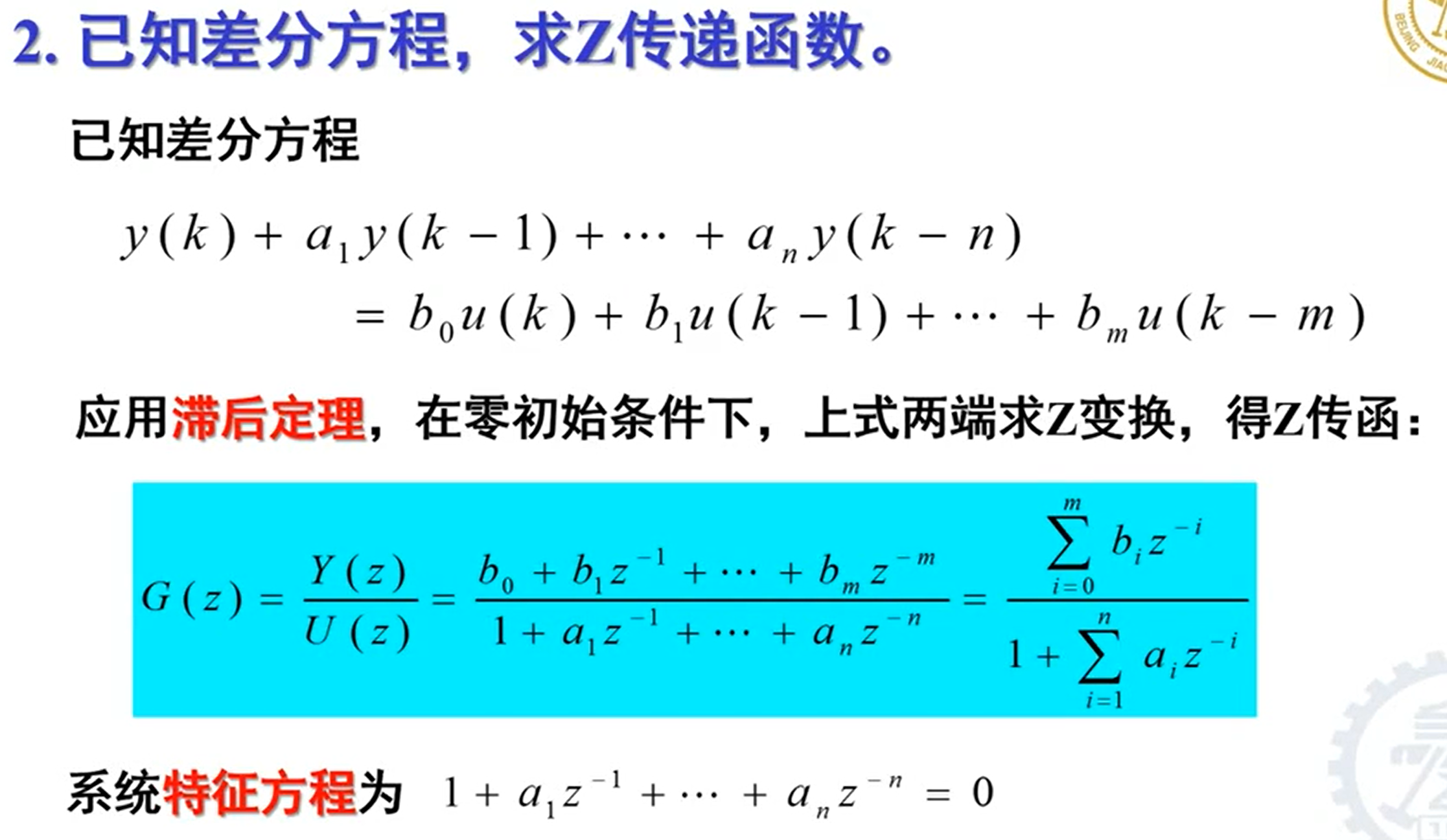
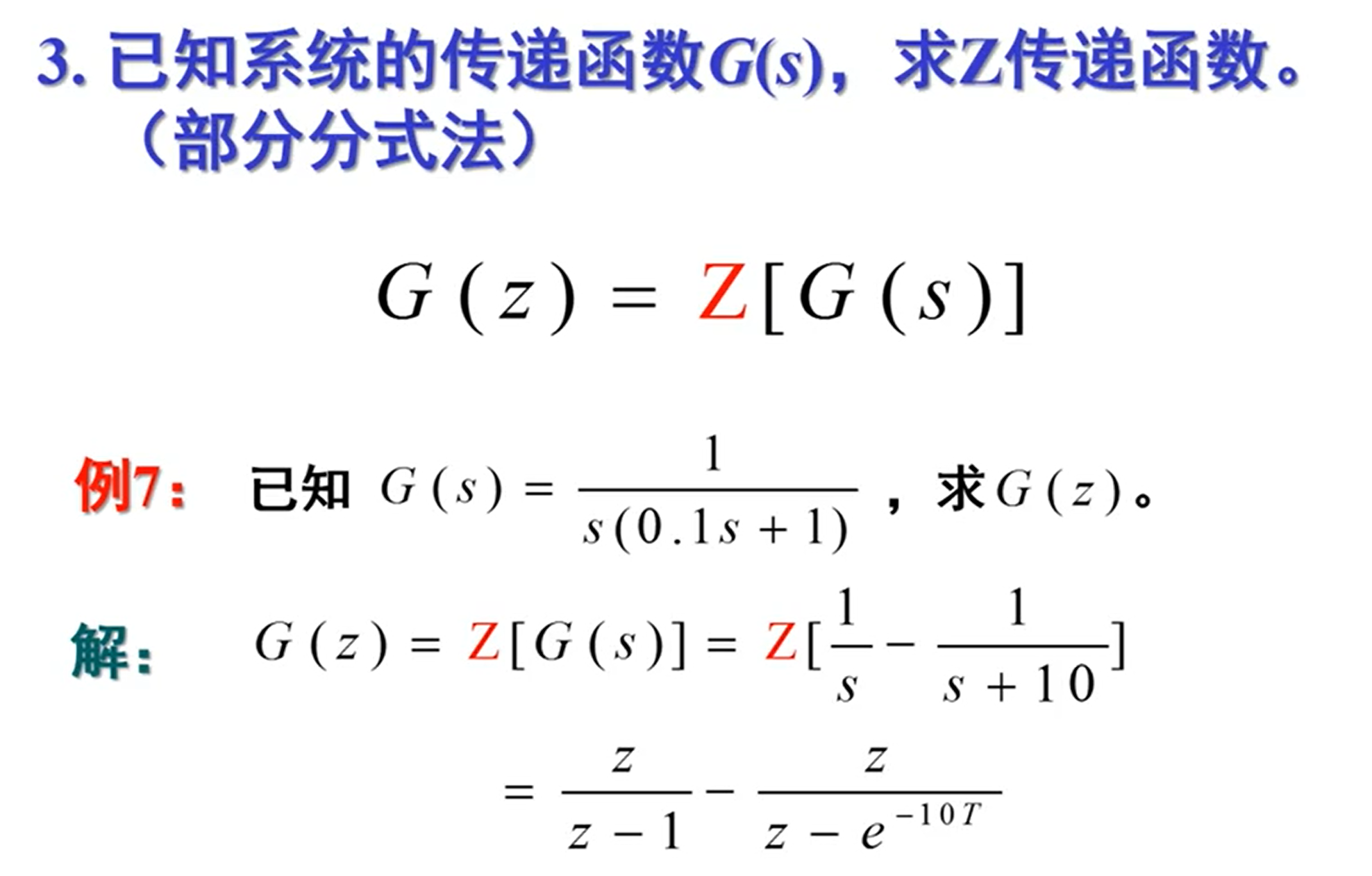
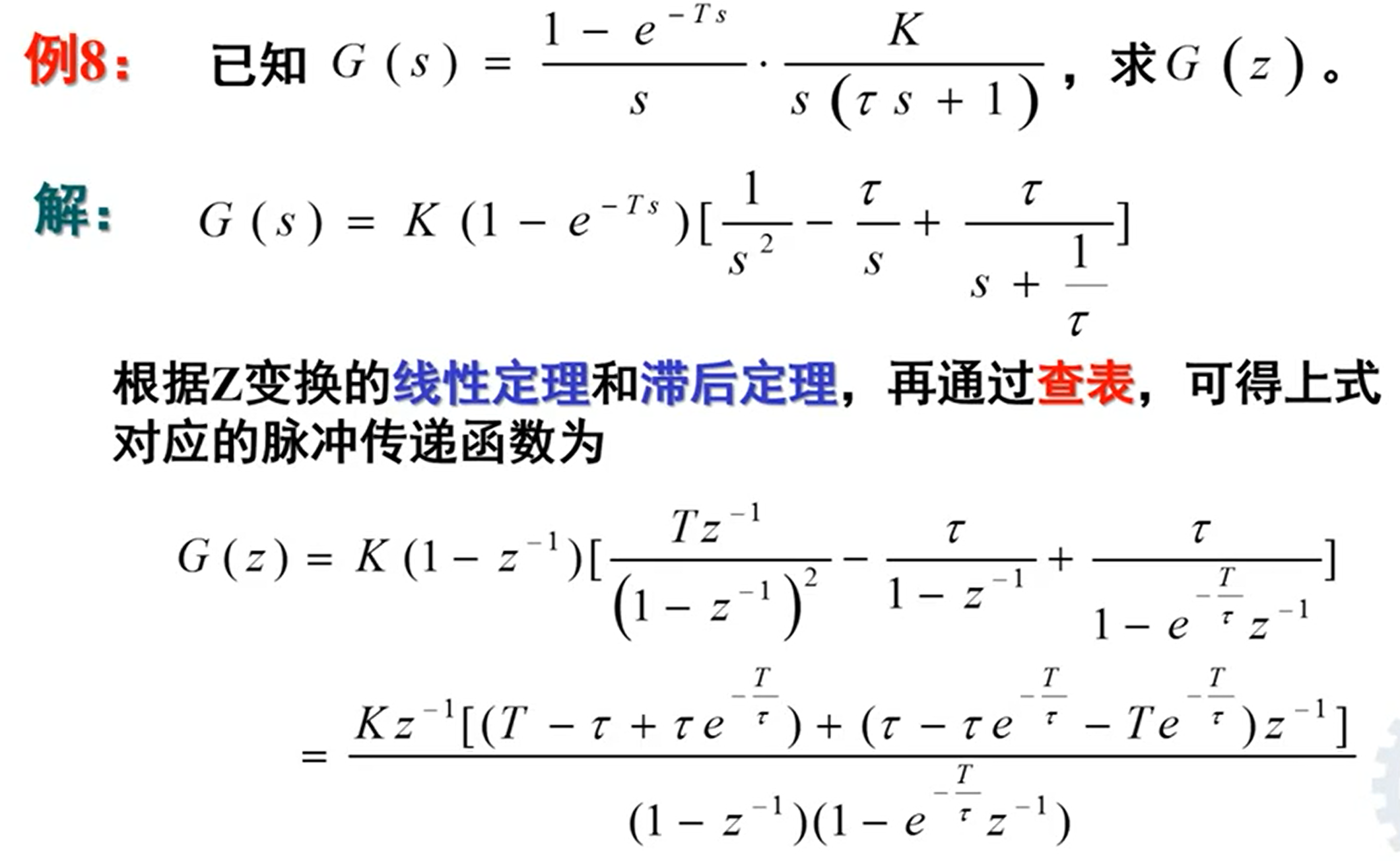
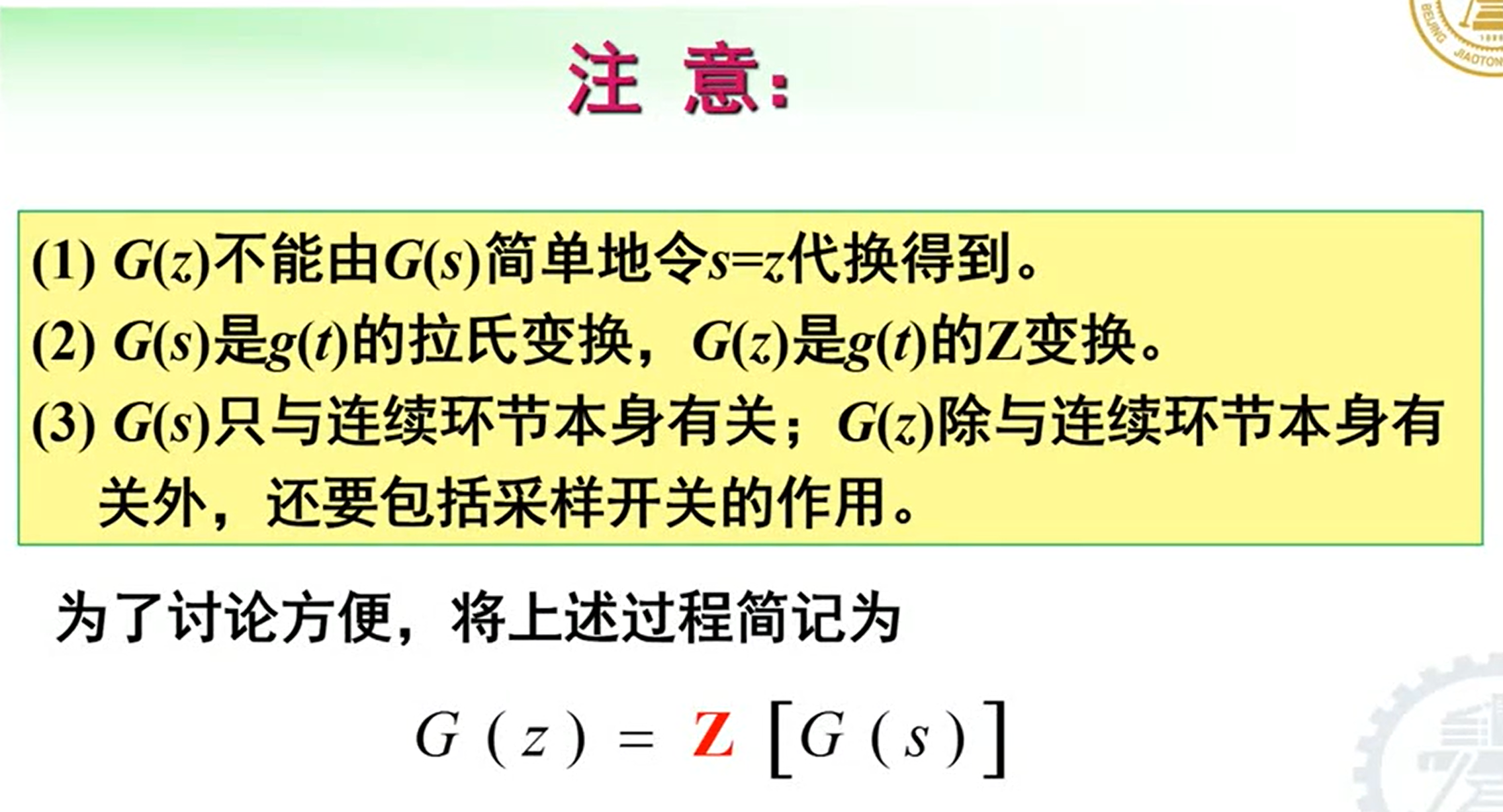
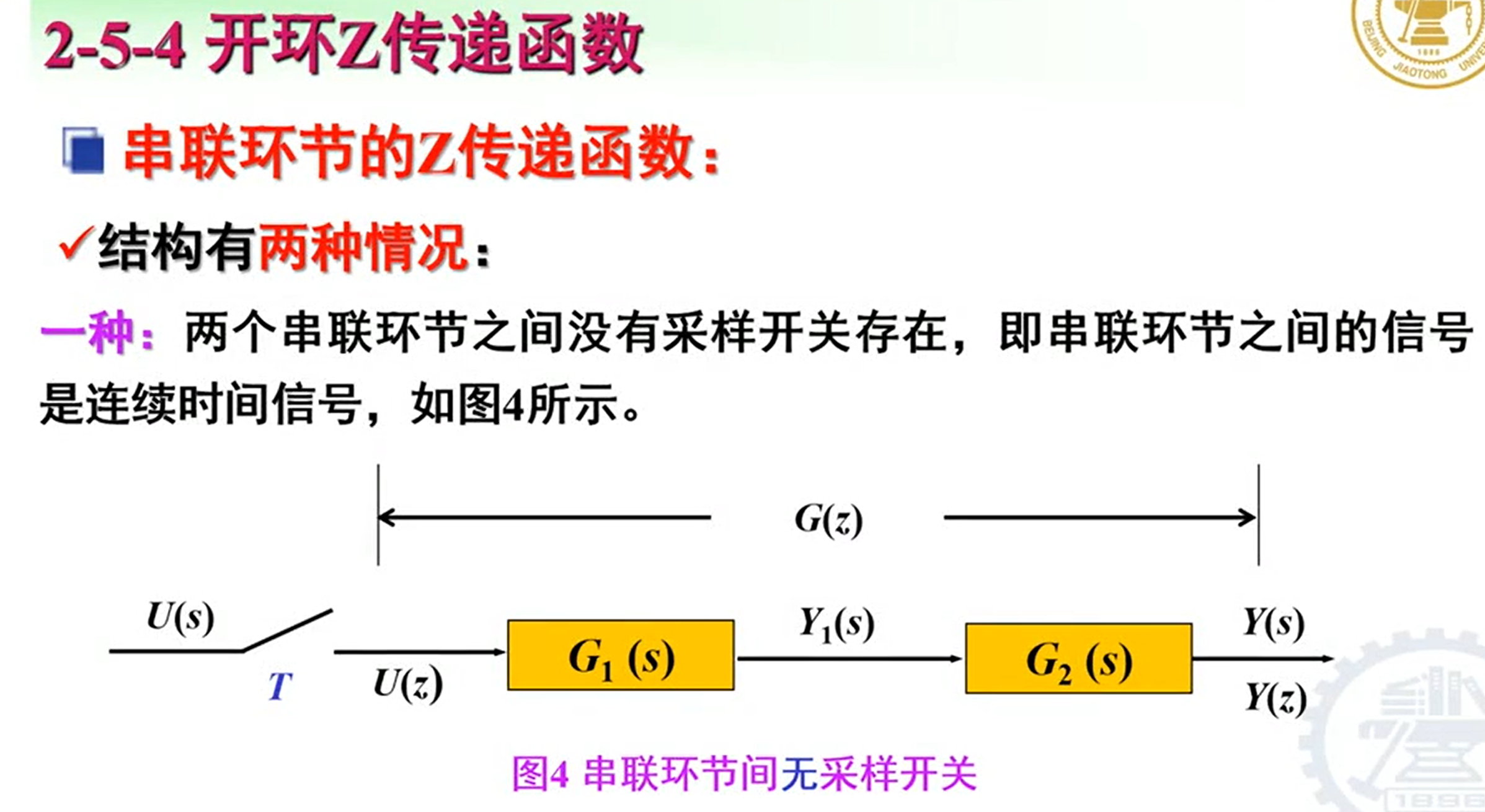
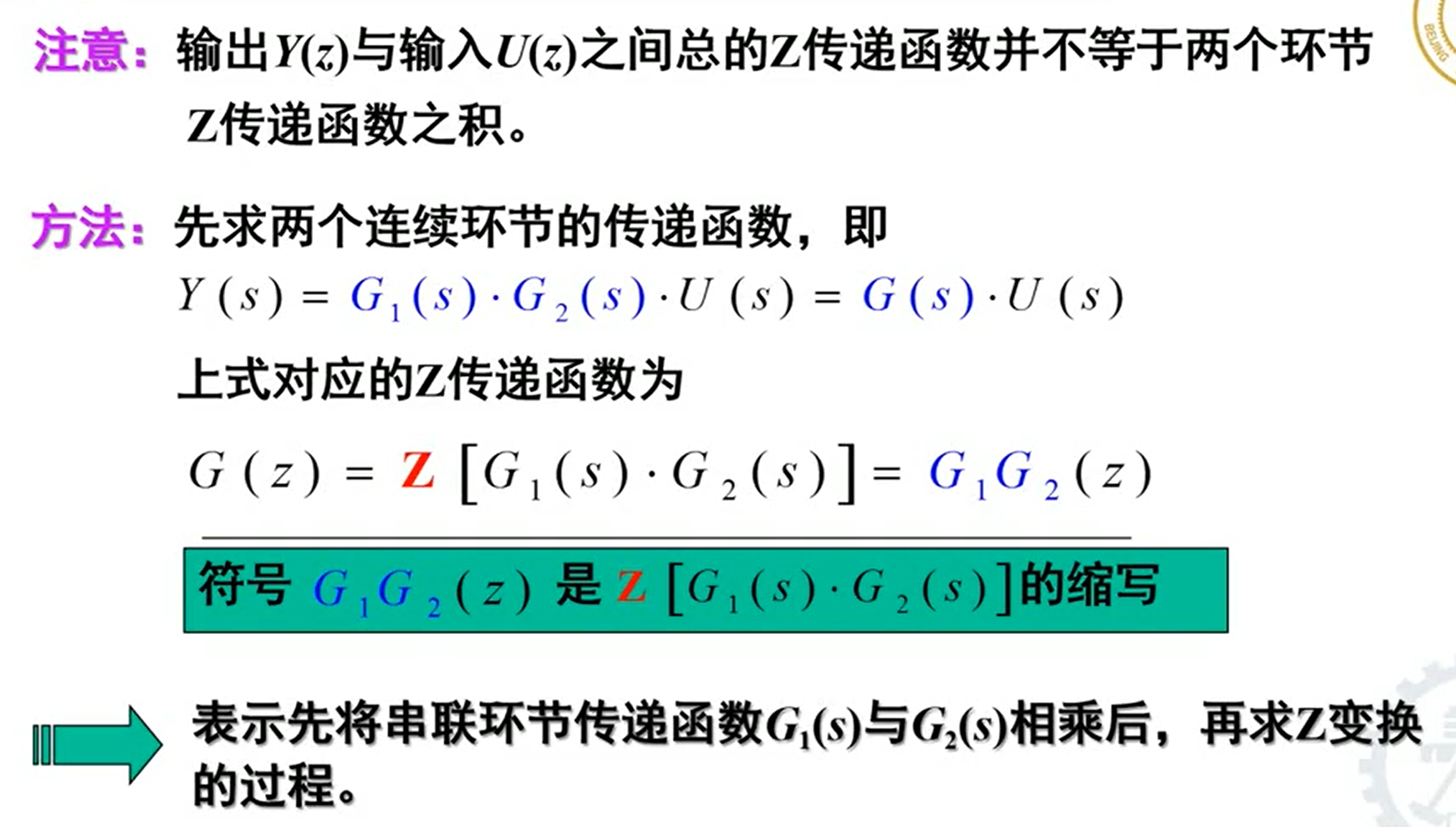
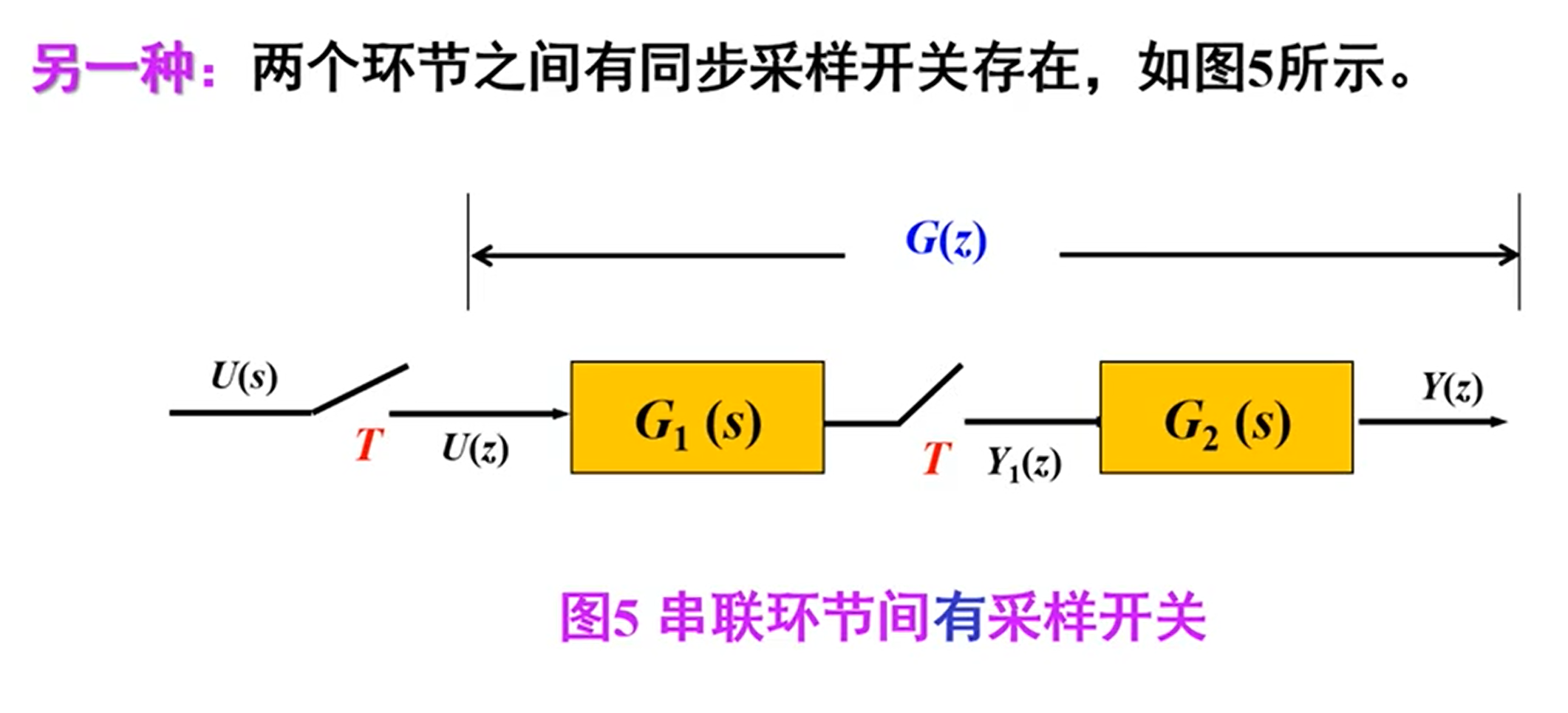
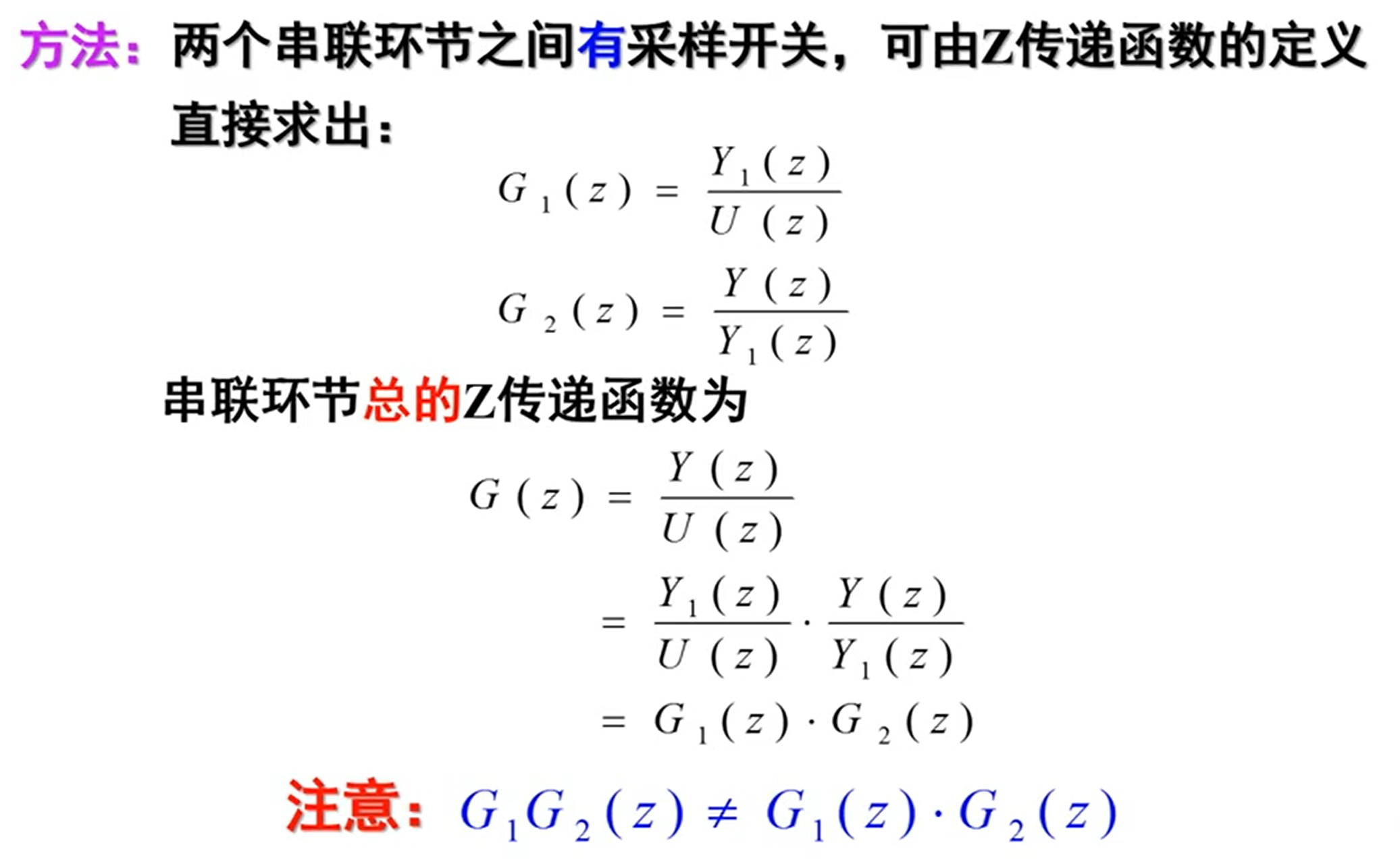
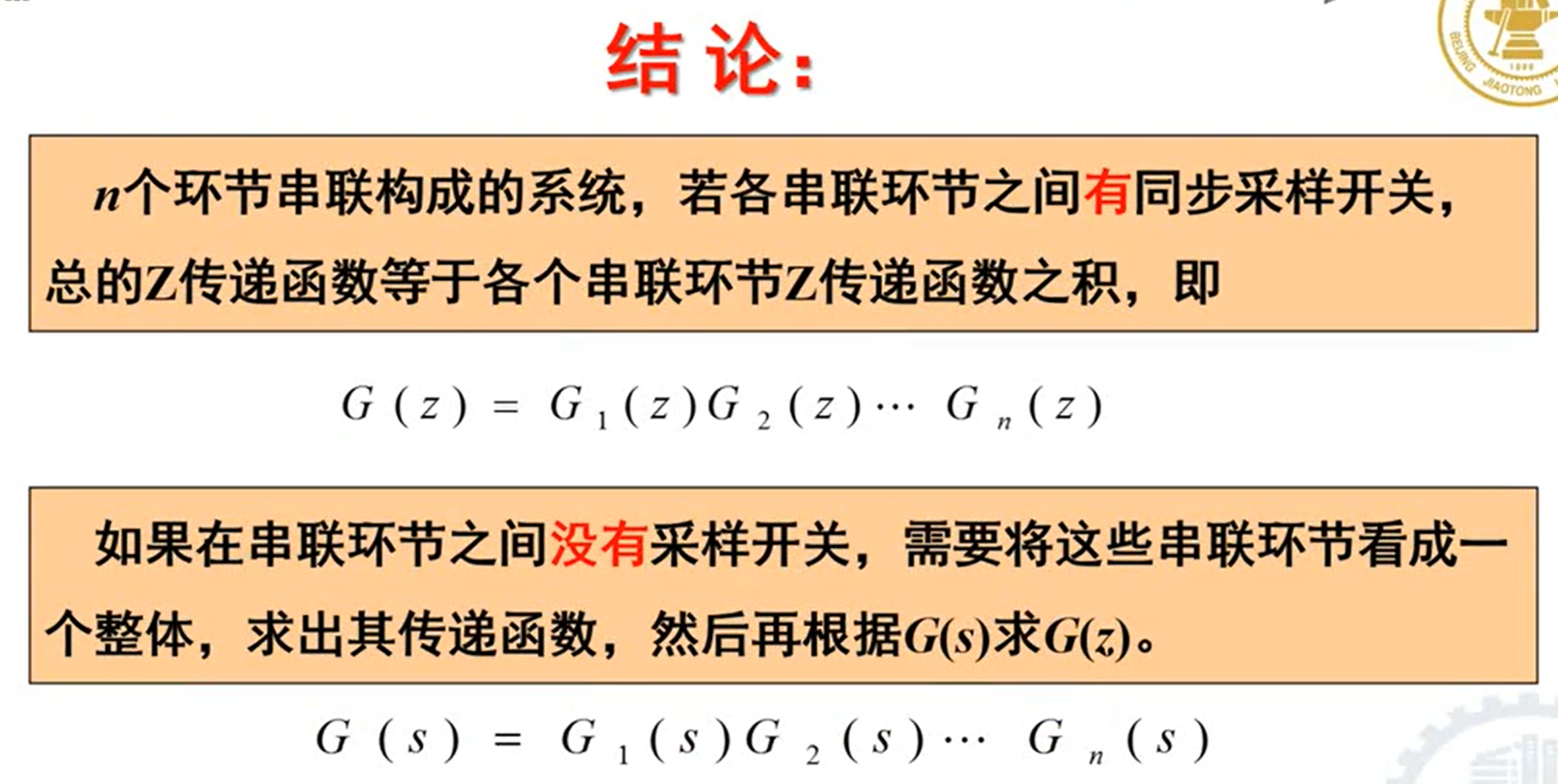
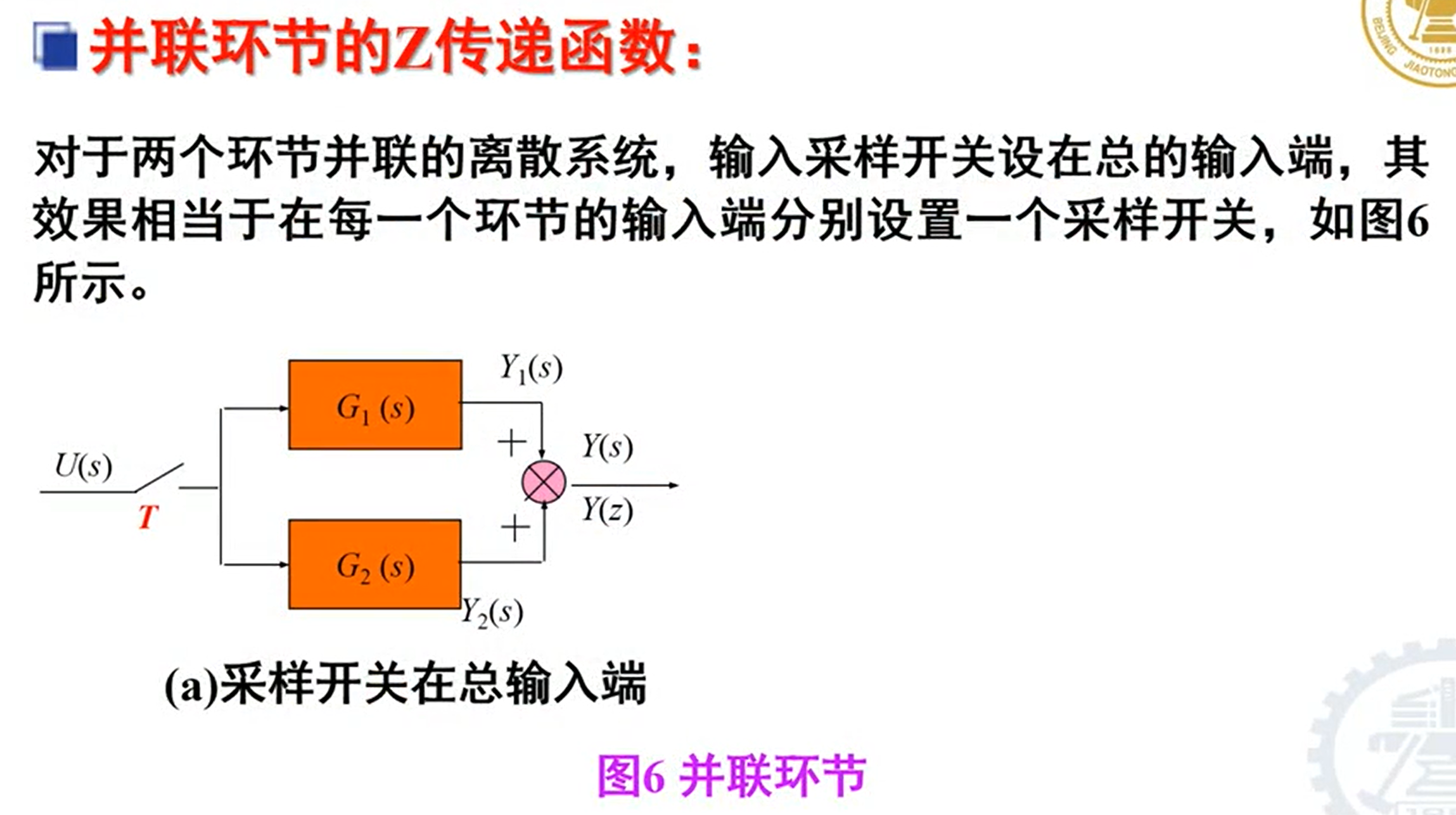
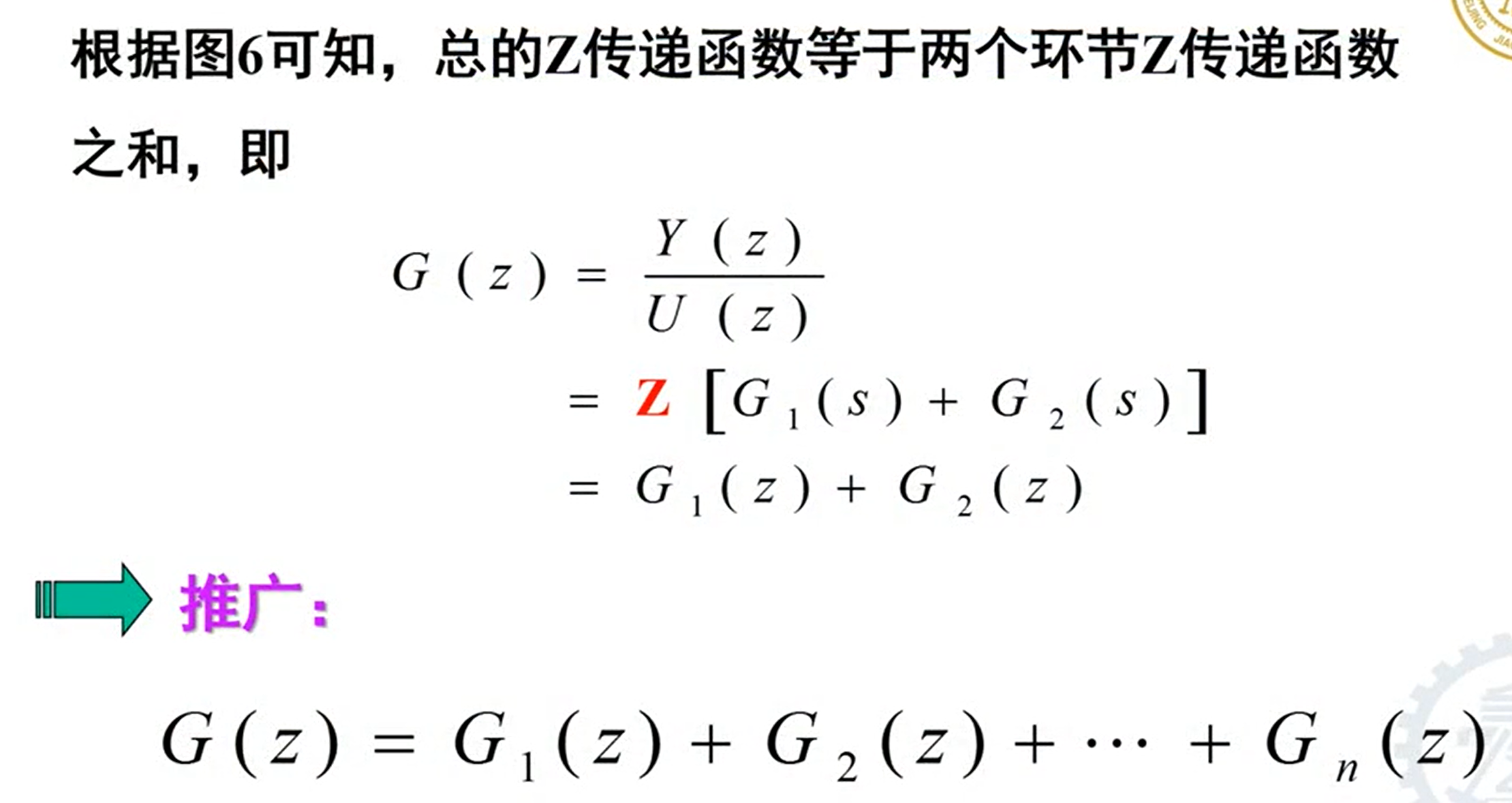
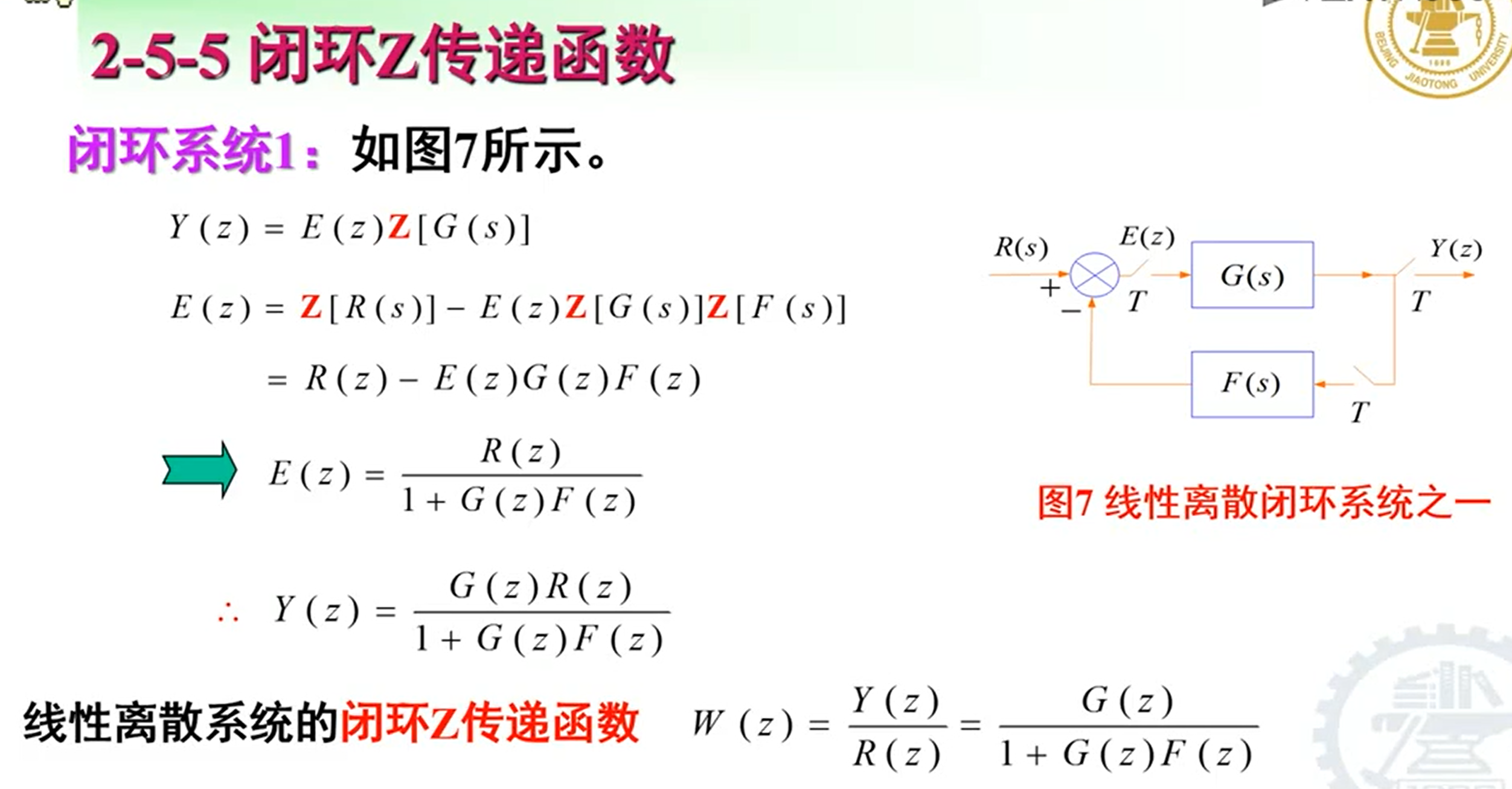
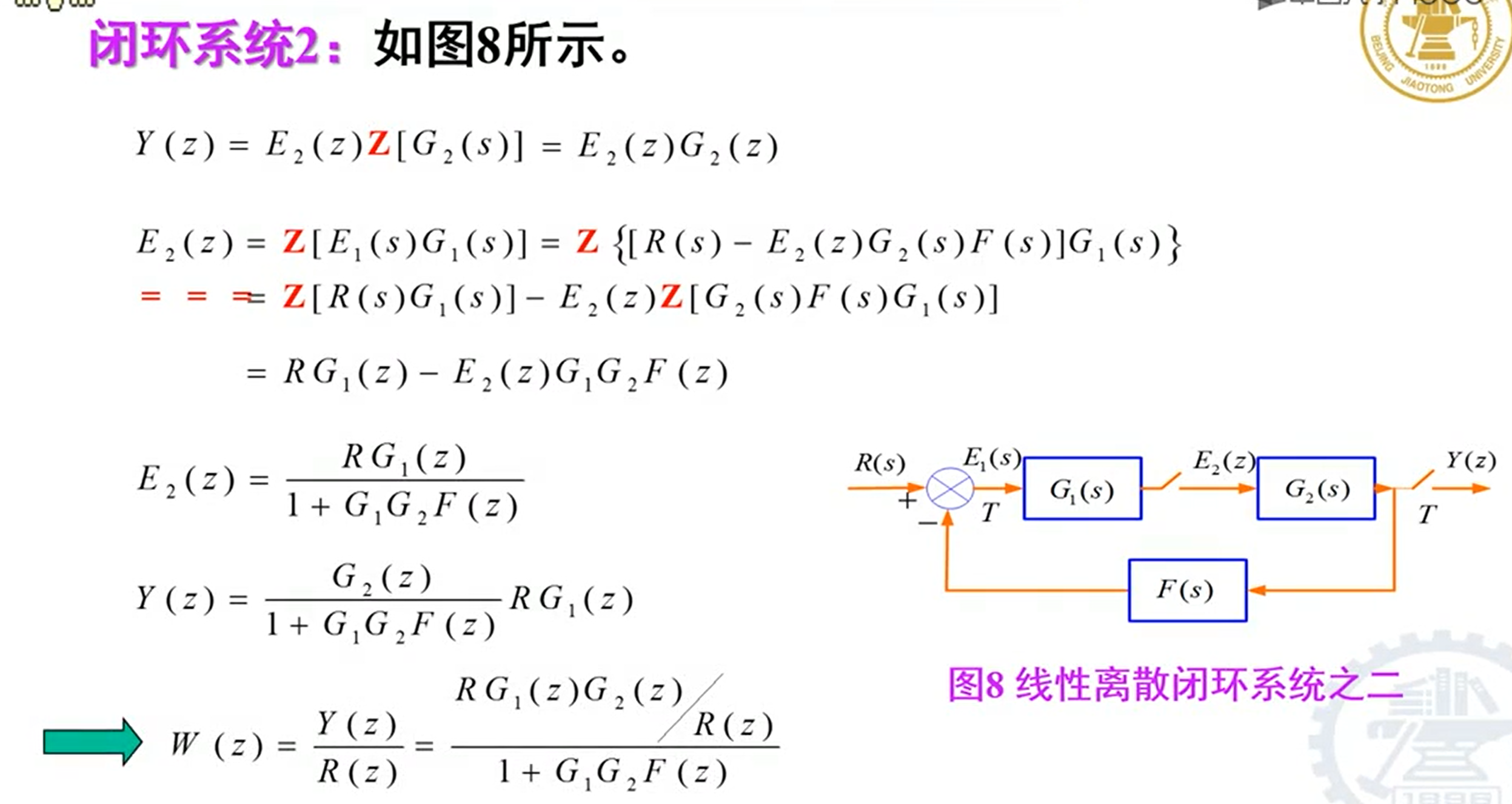
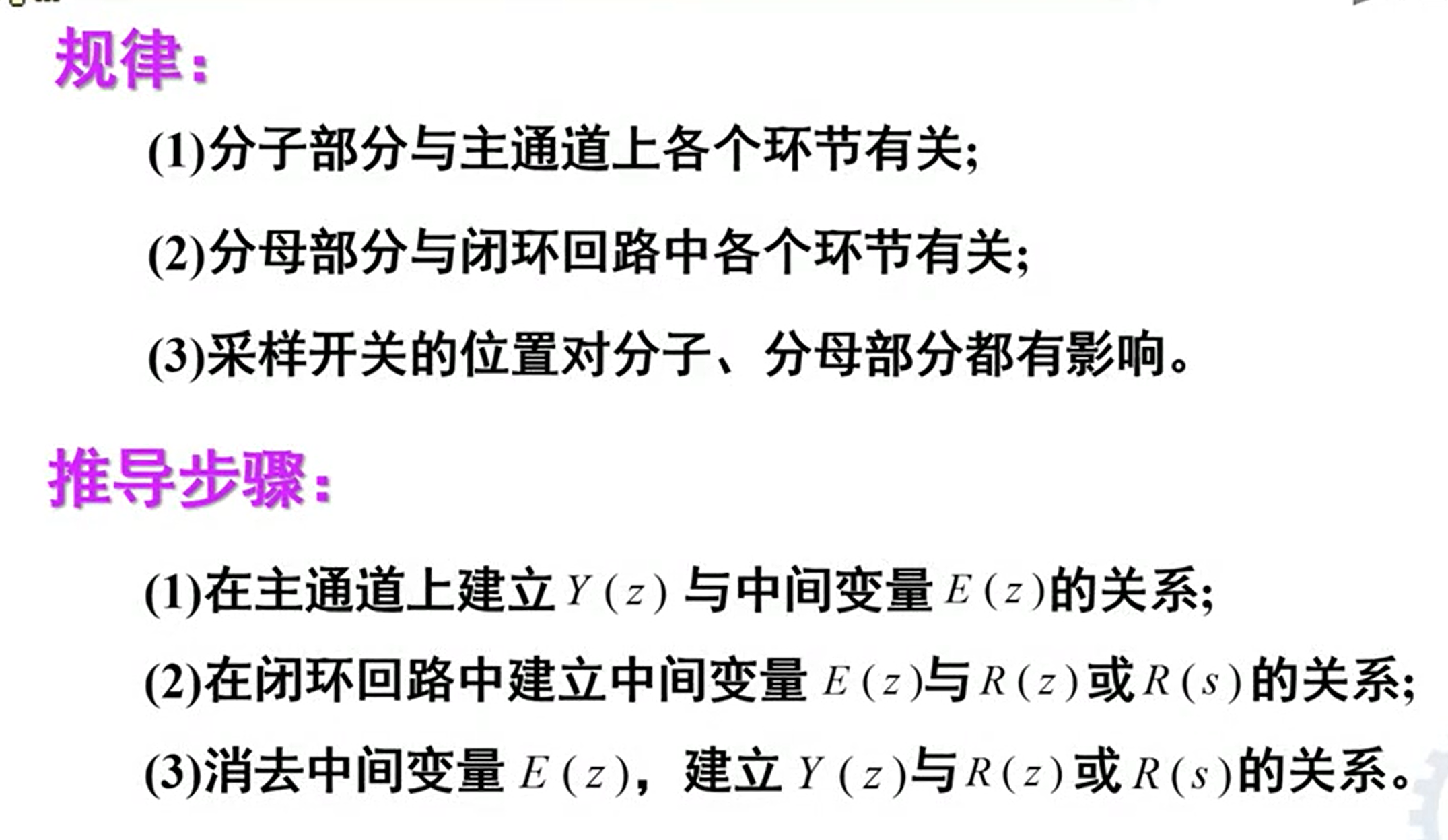
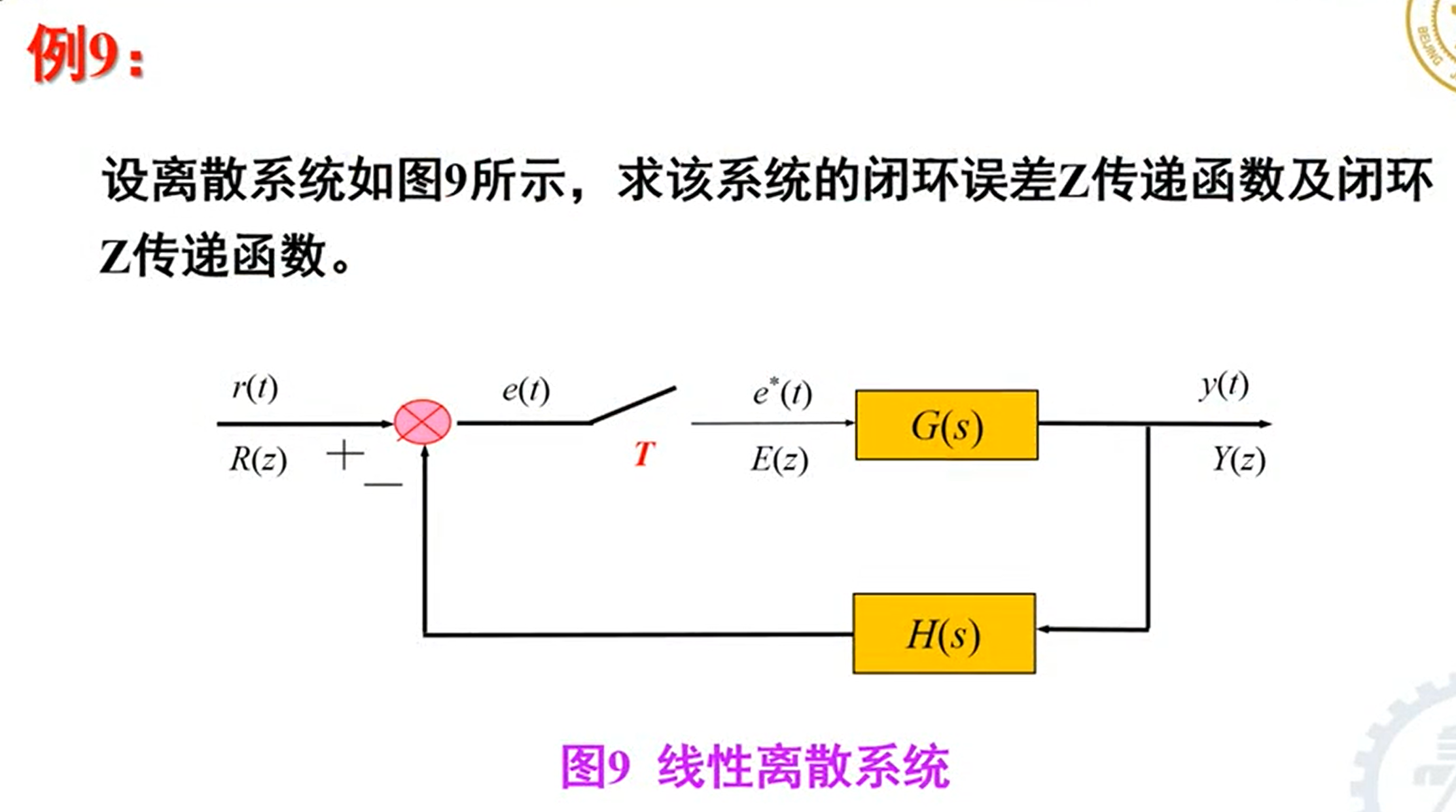
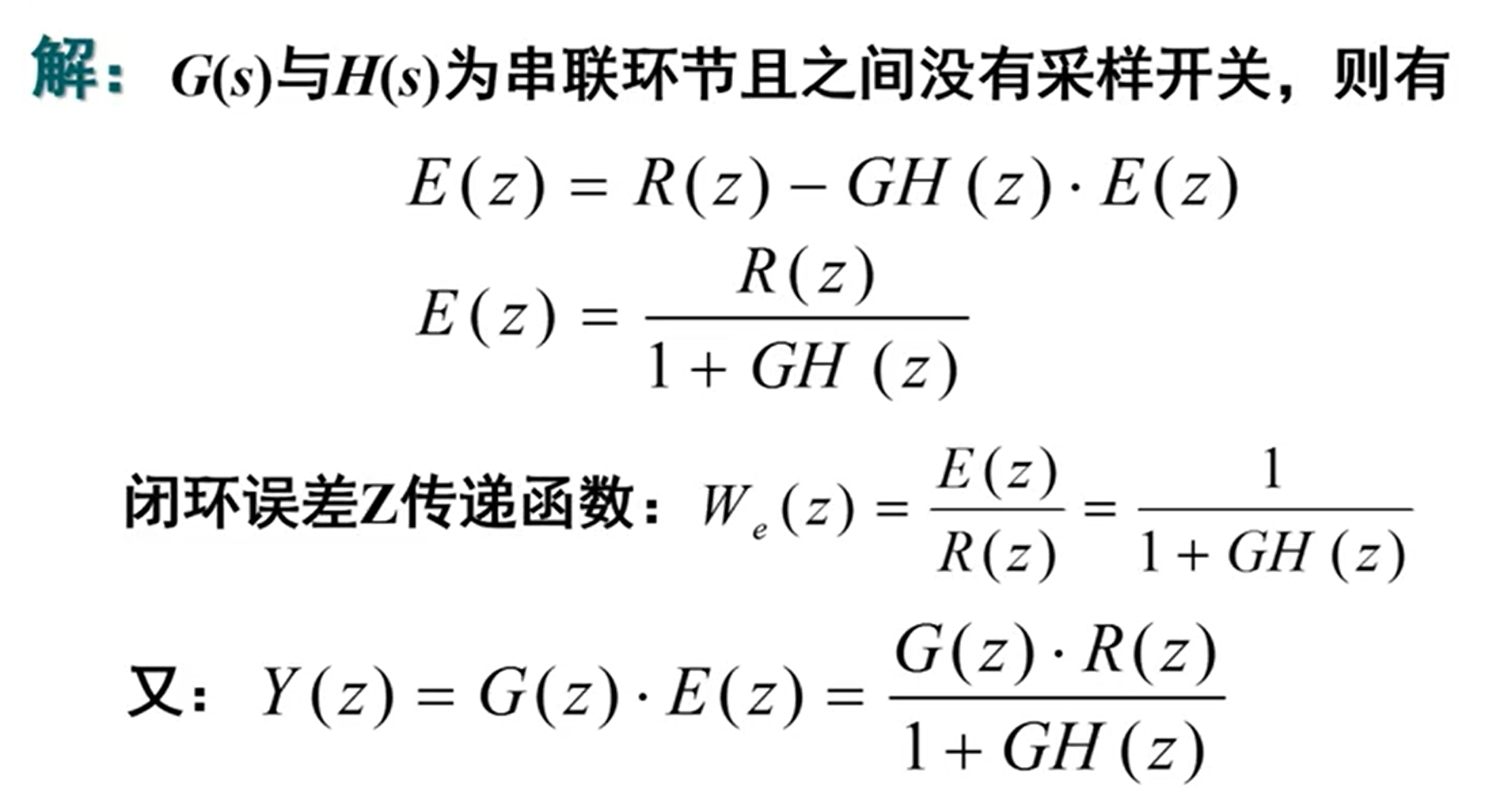
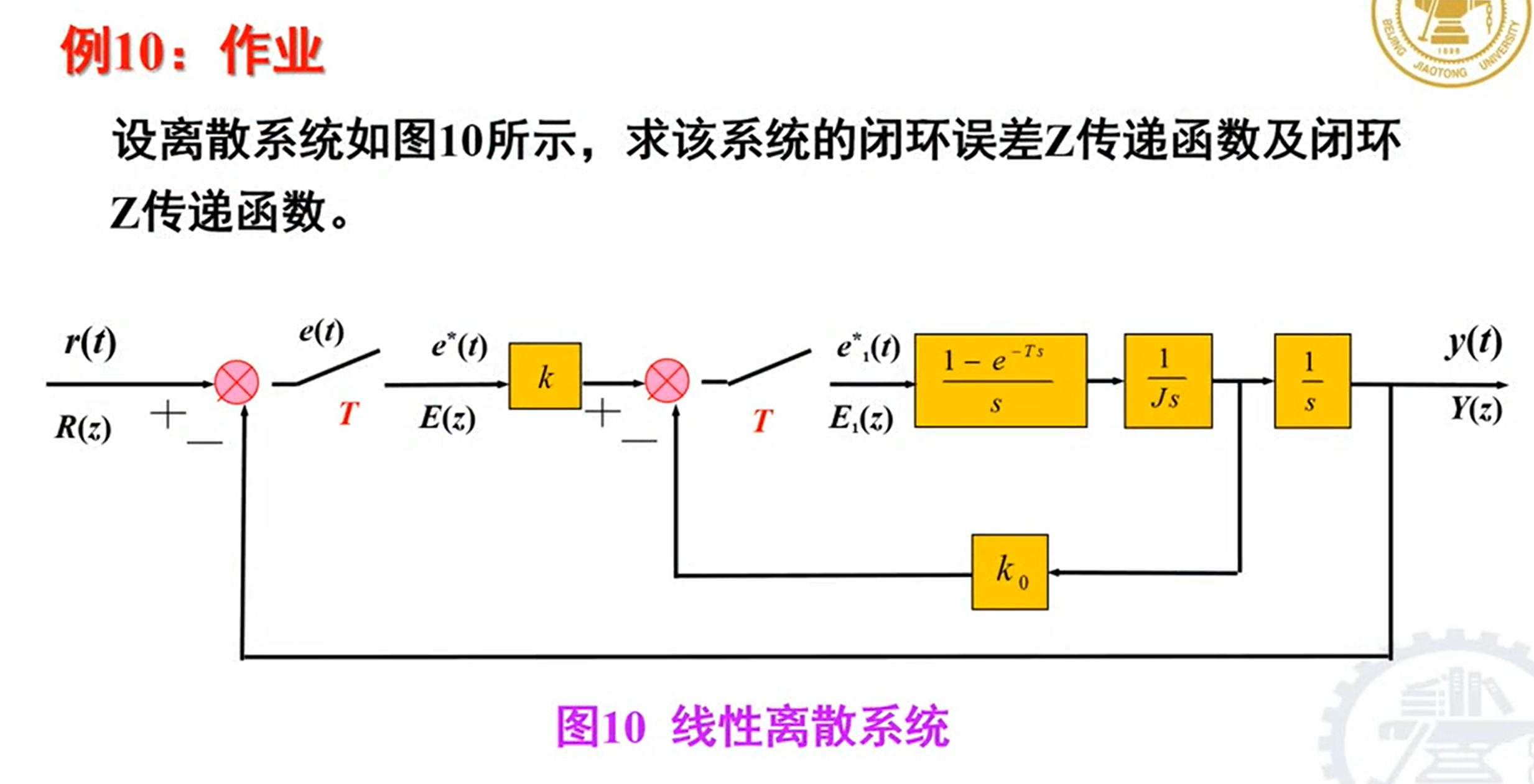
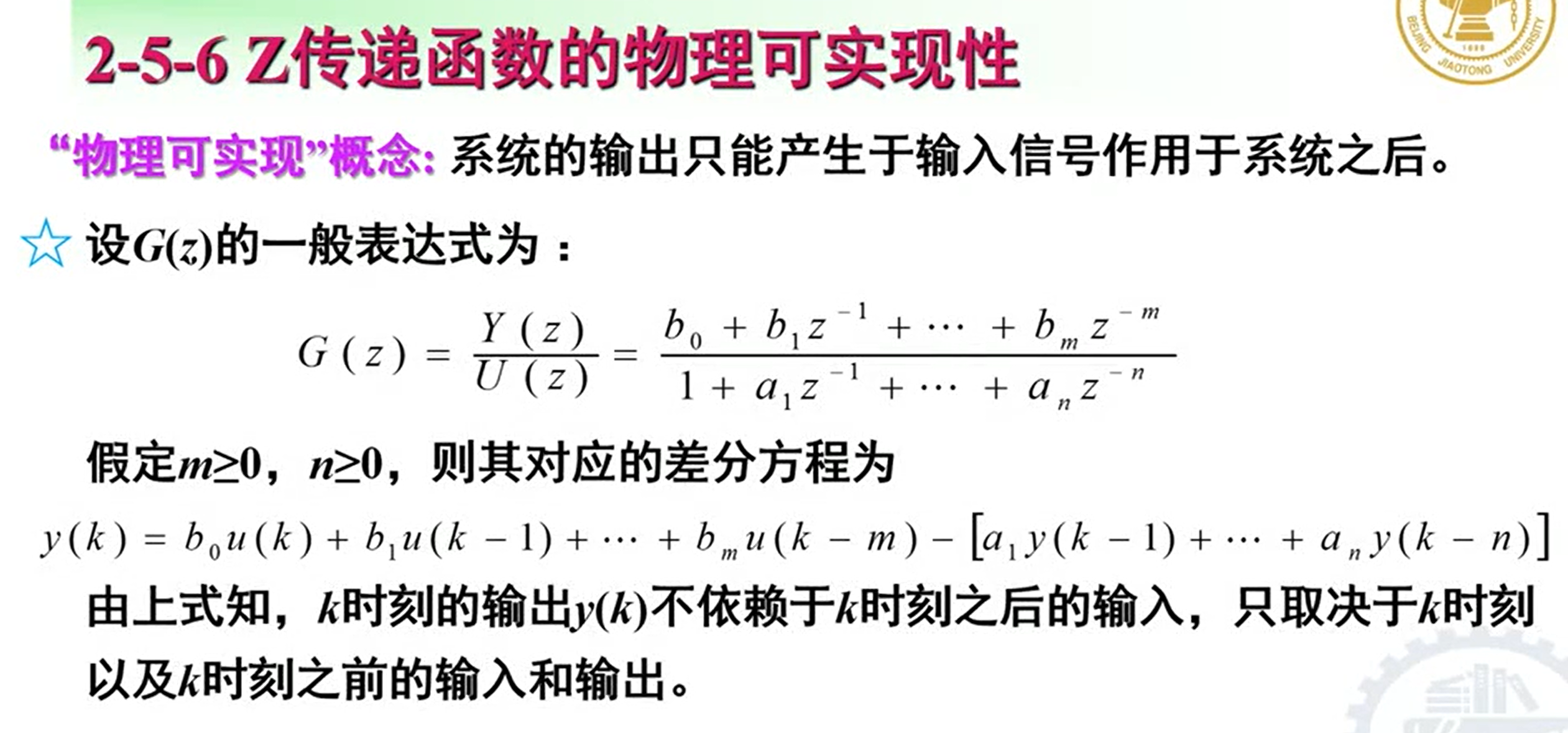
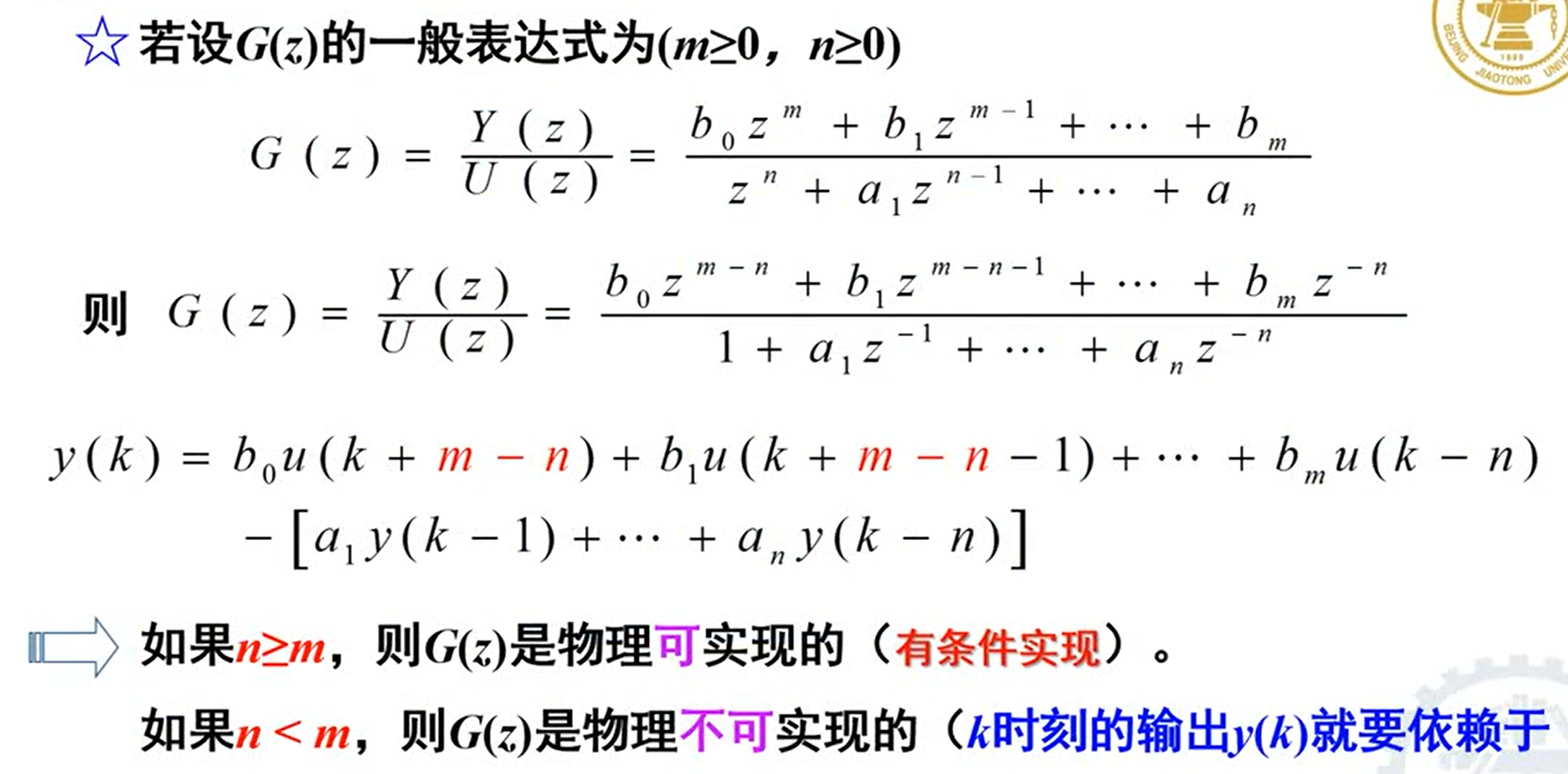
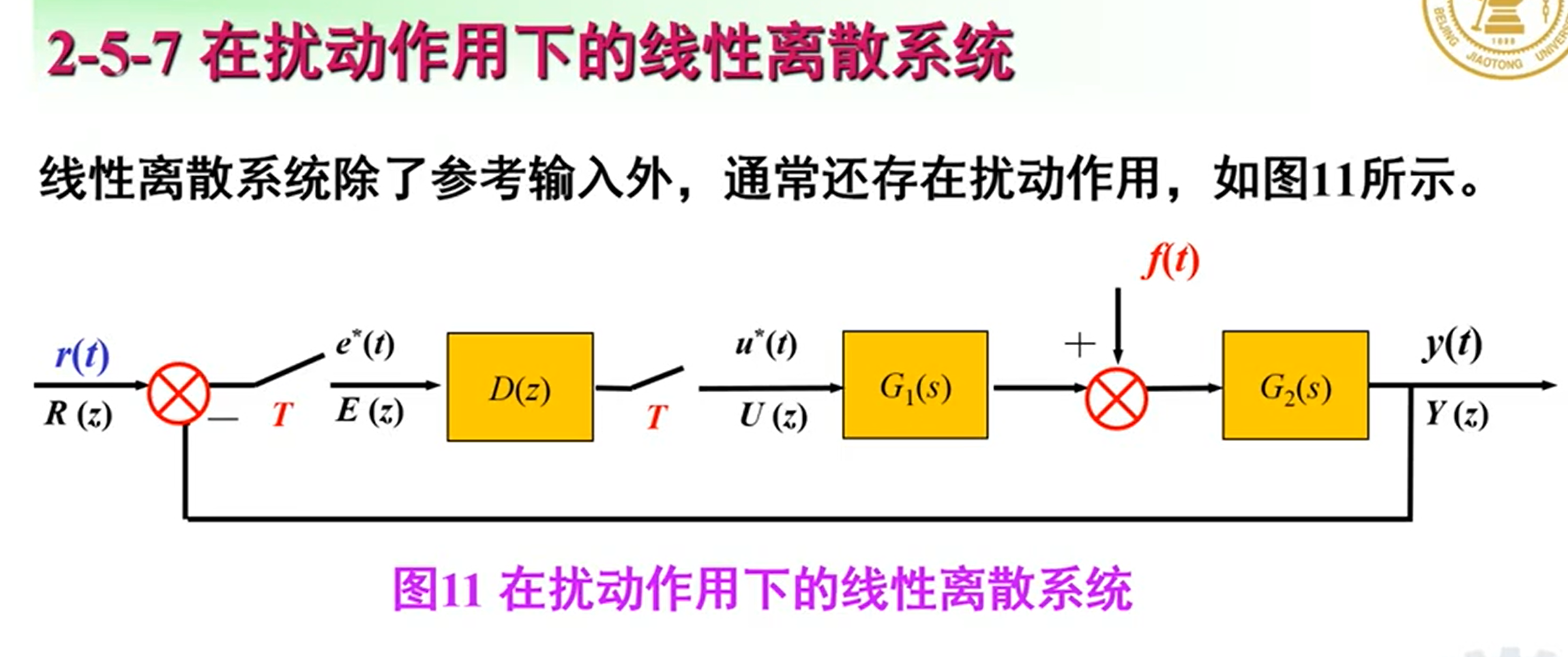
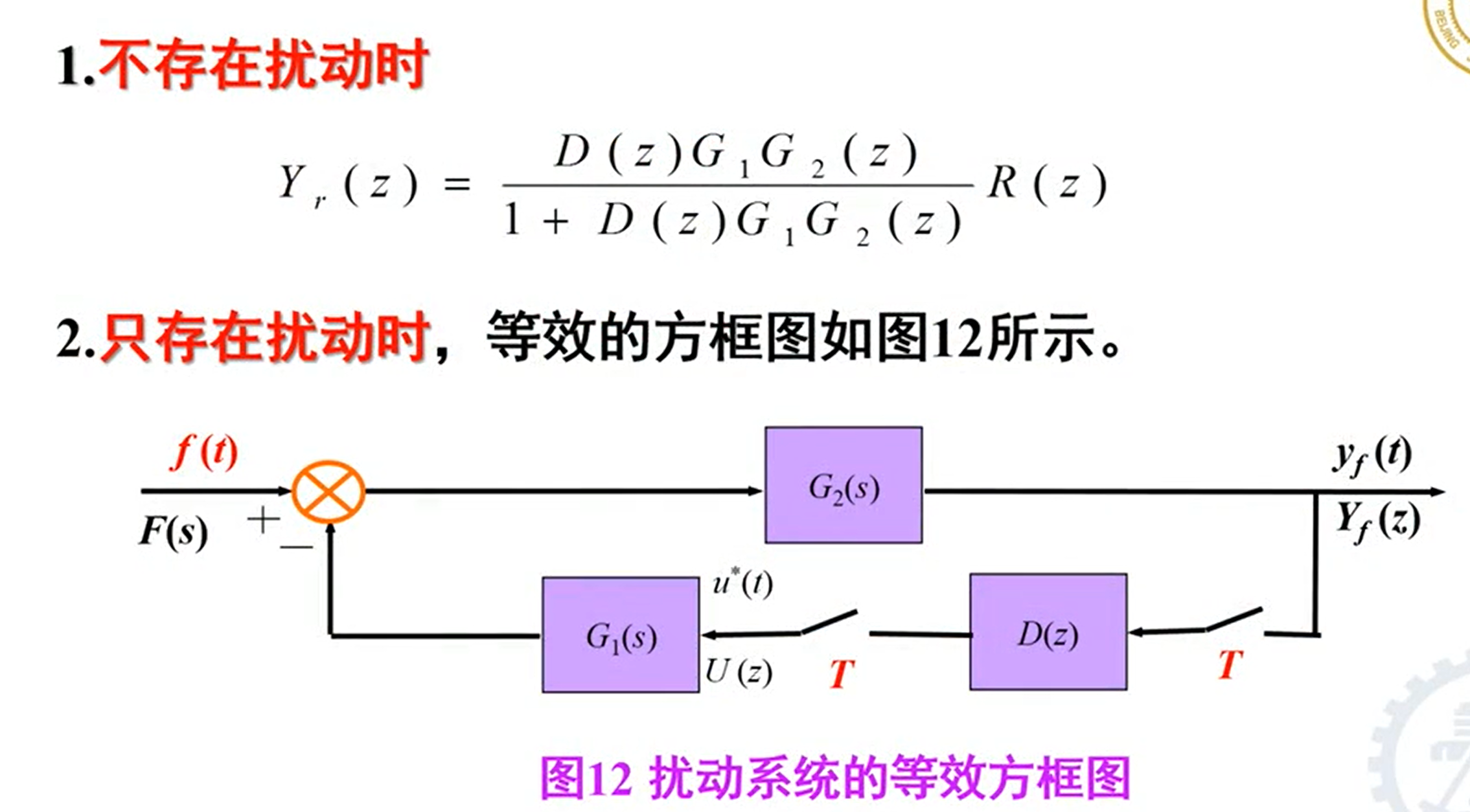
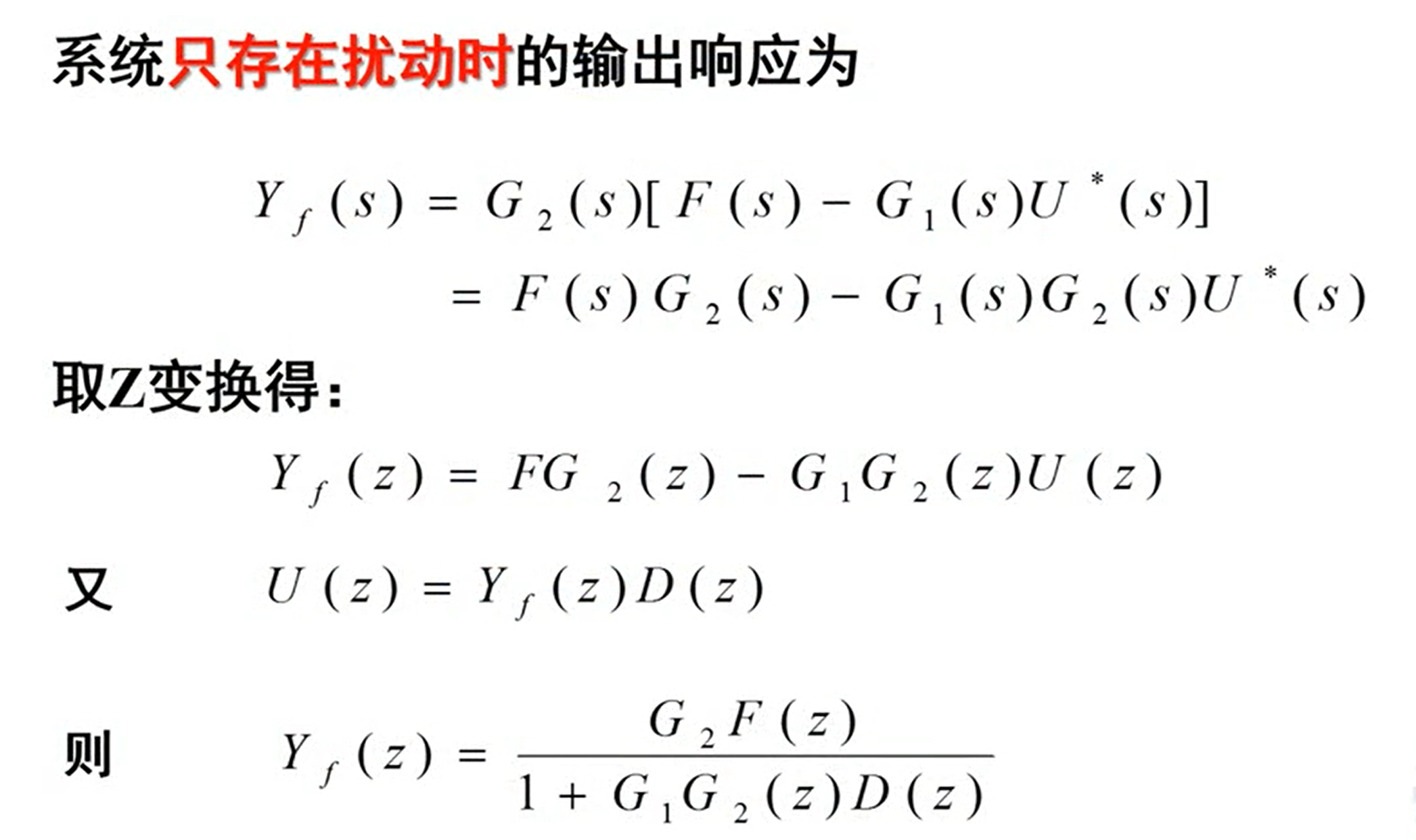
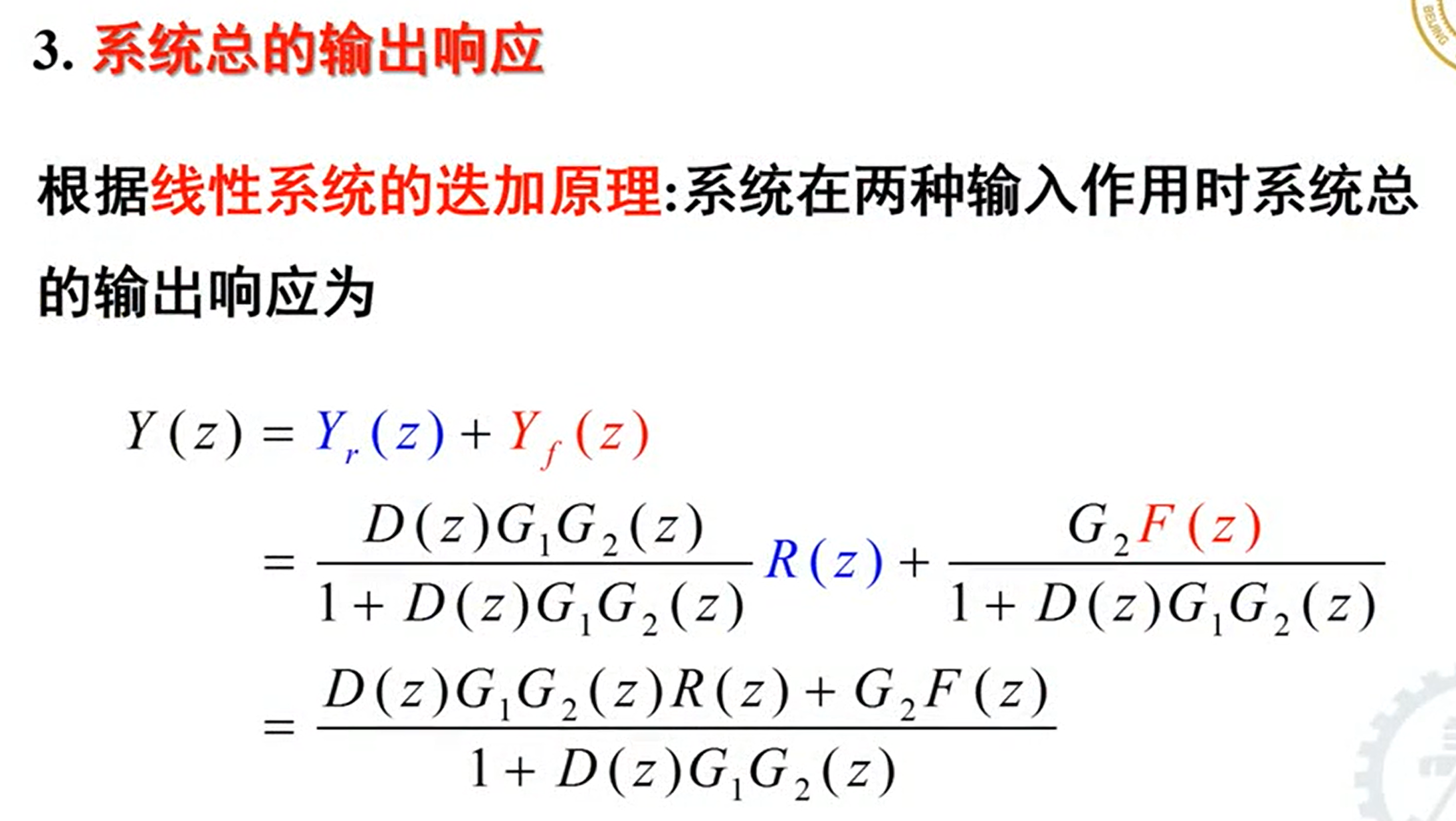
脉冲传递函数
![image-20220521210306788]()
![image-20220521210347725]()
![image-20220521210421595]()
![image-20220521210543612]()
![image-20220521210613730]()
![image-20220521210645944]()
![image-20220521210731860]()
![image-20220521210857998]()
![image-20220521211057077]()
![image-20220521211140706]()
![image-20220521211215971]()
![image-20220521211309412]()
![image-20220521211352292]()
![image-20220521211418051]()
![image-20220521211503530]()
![image-20220521211616355]()
![image-20220521211648480]()
![image-20220521211758712]()
![image-20220521211835254]()
![image-20220521212014029]()
![image-20220521212104574]()
![image-20220521212152944]()
![image-20220521212226619]()
![image-20220521212253352]()
![image-20220521212316744]()
![image-20220521212403855]()
![image-20220521212503141]()
![image-20220521212546092]()
![image-20220521212601747]()
![image-20220521212625974]()
![image-20220521212657368]()
线性系统稳定性分析(极点法、朱利判据、W判据)
离散系统稳态误差分析(控制精度)
 n——2进制数字长
n——2进制数字长




 浙公网安备 33010602011771号
浙公网安备 33010602011771号