

RecastNavigation 之 Recast
0. 介绍
在实际应用中,导航网格是以邻接的凸多边形集合来表示的,因为在独立的凸多边形内部,可以保证任意两点直线可达。
而寻路算法的关键是通过算法找到一组凸多边形,这组多边形满足这样的条件:
- 第一个和最后一个多边形包含了寻路的起始点和终点
- 中间的多边形负责所有多边形的连通性
因此导航网格寻路可以粗略的分成两大部分:
- 将 3D 场景转化为邻接的凸多边形集合
- 在凸多边形集合上寻路
在 RecastNavigation 项目中, Recast 工程对应第一部分,Detour 工程对应第二部分,这里主要利用 RecastDemo 对 Recast 生成导航网格的流程进行介绍。
其整体流程大致分为 7 步:
- load mesh & Initialize build config
- Rasterize input polygon soup
- Filter walkables surfaces
- Partition walkable surface to simple regions
- Trace and simplify region contours.
- Build polygons mesh from contours
- Create detail mesh which allows to access approximate height on each polygon
流程比较繁杂,接下来一步一步进行分析。
RecastNavigation 代码地址:https://github.com/recastnavigation/recastnavigation
RecastNavigation 版本:1.5.1
1. Load mesh & Initialize build config
这一步主要是生成导航网格的前置工作:
- 加载 3D 场景数据
- 生成构建导航网格的配置
1.1 加载 3D 场景数据
导航网格的生成首先依赖 3D 场景的数据,好比做菜的时候总得先有菜,RecastDemo 中提供了 3 种场景,其源数据为 obj 的文本文件(应该是通过 maya 之类的编辑器导出的),其格式大致如下:
f 191/191/191 192/190/192 188/185/188 187/188/187 f 189/192/189 191/191/191 187/188/187 185/187/185 v 12.915435 -2.799647 -13.547013 v 15.723457 -2.799647 -13.889110 v 12.915435 10.274025 -13.547013 v 16.034479 10.274025 -11.336161 vn -0.642934 -0.577350 -0.503291 vn 0.503291 -0.577350 -0.642934 vn -0.642934 0.577350 -0.503291 vn 0.503291 0.577350 -0.642934 vn 0.642934 0.577350 0.503291 vt 0.000000 0.000000 vt 0.000000 0.000000
RecastDemo 中采用 InputGemo::loadMesh 接口来解析文件,其主要解析 f 和 v 开头的数据,这两者是相辅相成的,v 表示顶点坐标(vertex) ,f 表示面(face),其格式通常为 3 个"v/vt/vn" 的索引形式组成, 比如 obj 文件中f 3/13/5 4/14/6 5/15/7 ,表示由第3、第13、第5 这三个顶点组成了一个三角平面,平面的纹理由第 4、第 14、第 6这三个纹理坐标形成,而这个平面的朝向是第 5、第 15、第 7这三个顶点的法向量的平均值决定的。关于 obj 文件的格式描述可以参考此处。
总体来说,RecastDemo 这里主要将场景数据的点和面加载解析,形成了一个个三角面,实际的场景可参考下图。

1.2 构建 Bounding volume hierarchy
读取完数据后,为了方便管理 3D 场景物体以及下一步的体素化操作,采用 Bounding volume hierarchy 的方式对场景物体进行管理。其思路就是将场景的空间划分为多块区域,然后用树状结构保存起来,如下图:

大致可以看出树和原场景包围盒的对应关系:根节点为全局的包围盒,依次划分,直到剩下一个独立的几何体作为一个叶子节点。
RecastDemo 中构建该树的接口为 InputGeom::rcCreateChunkyTriMesh ,其执行流程如下:
- 先遍历所有三角面(加载场景数据时保存的),计算每个三角面【投影】的包围盒(此处将问题转换为二维平面)
- 计算当前 3D 场景投影的包围盒,作为根节点
- 当前节点三角面的投影包围盒数量是否大于 256
- 小于 256,则该节点作为叶子节点,并且返回
- 如果三角面数量大于 256
- 先计算当前这个节点空间的包围盒大小
- 根据包围盒大小,算出 X 轴和 Y 轴的长度
- 找出较长的(X/Y)轴,对该节点包围盒内的所有三角面包围盒进行(X/Y 轴)坐标排序
- 将排序后的数组进行对半划分,继续递归处理两个区域
其接口参数和树结构体如下所示:
const float* verts;///输入的顶点集合 const int* tris;///输入的三角形集合 int ntris;///输入的三角形个数 ///三角形在xz平面投影的包围盒 struct BoundsItem { float bmin[2]; float bmax[2]; int i;///由于会对包围盒按坐标排序,id记录了这个包围盒对应的输入三角形的id }; ///BVH的节点 struct rcChunkyTriMeshNode { float bmin[2];///包含区域内所有三角形的包围盒 float bmax[2]; int i;///i为正表示是叶子节点;i为负表示是非叶子节点,大小等于在数组内的覆盖范围 int n;///节点内包含的三角形个数 }; ///一棵BVH树 struct rcChunkyTriMesh { rcChunkyTriMeshNode* nodes;///根节点 int nnodes;///节点个数 int* tris;///按区域划分排序后的三角形集合 int ntris;///三角形个数 int maxTrisPerChunk;///叶子节点最多包含的三角形数 }
1.3 配置初始化
主要列举一些比较重要的配置:

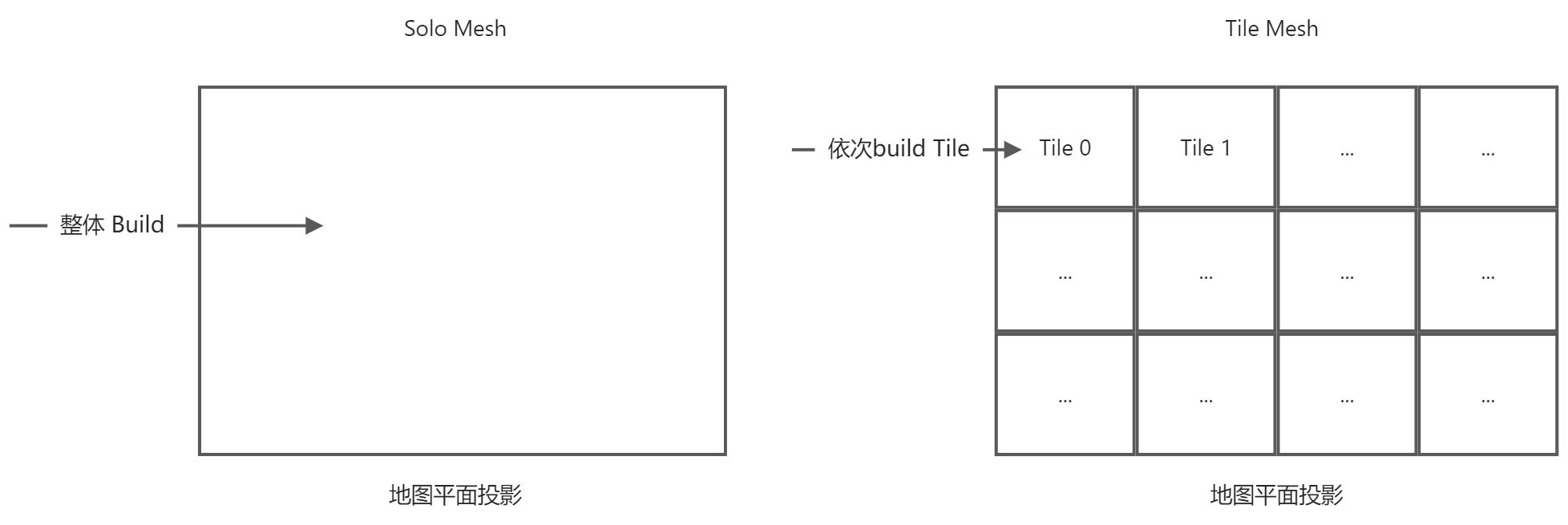
其中 Sample 选项提供了几种 Mesh:
- Solo Mesh
- Tile Mesh
- Temp Obstacles
其中 Temp Obstacles 是在 Tile Mesh 的基础上做了动态阻挡的优化,NavMesh 的生成主要还是区分为 Solo Mesh 和 Tile Mesh,这两者的主要区别在于,Solo Mesh 每次生成的时候,都是对整块地图进行生成导航网格,而 Tile Mesh 可以按另一个配置 TileSize ,将地图划分成多个 Tile 块,然后对单个 Tile 进行生成导航网格。
2. Rasterize input polygon soup
核心接口如下:
/// @par /// /// Spans will only be added for triangles that overlap the heightfield grid. /// /// @see rcHeightfield bool rcRasterizeTriangles(rcContext* ctx, const float* verts, const int /*nv*/, const int* tris, const unsigned char* areas, const int nt, rcHeightfield& solid, const int flagMergeThr)
由于这里选择的是 TileMesh,接下来需要对所有 Tile 中的三角面进行体素化,创建高度场等操作,这里主要分为如下操作:
- 创建高度场
- 找到 Tile 中的三角面,标记其是否可以行走
- 对三角面执行体素化,将体素格子合并为 Span 加入高度场
2.1 基础概念
由于体素化操作会将体素盒子合并为 Span 并且加入到高度场中,因此这里先对这几个名词进行简单介绍
体素盒子(Voxel):
根据配置的参数在空间中画出3维网格,3维网格的一个单元就是一个体素盒子(配置中的 Cell Size 表示盒子在 XZ 轴的长度,Cell Height 表示盒子的高度)
区间(Span):
一列(xz平面投影相同)【连续体素】盒子,由 rcSpan 这个结构体来表示,smin 和 smax 表示【连续体素】的最低 y 坐标和最高 y 坐标(底面和顶面),next 指针实现了一个链表,方便管理投影相同的所有区间(区间与区域之前不连续),xz 的坐标记录在高度场中。
struct rcSpan { unsigned int smin : RC_SPAN_HEIGHT_BITS; ///< The lower limit of the span. [Limit: < #smax] unsigned int smax : RC_SPAN_HEIGHT_BITS; ///< The upper limit of the span. [Limit: <= #RC_SPAN_MAX_HEIGHT] unsigned int area : 6; ///< The area id assigned to the span. rcSpan* next; ///< The next span higher up in column. };
包围盒
通常说某个物体的包围盒,即指为包含该物体,且边平行于坐标轴的最小六面体

坐标轴
如下
高度场(HeightFields)
高度场是容纳了所有地图元素的一个容器,其维护了一个二维数组(表示 XZ 平面),数组元素是在 XZ 平面投影相同的 span 的链表,大致如下:

struct rcHeightfield { rcHeightfield(); ~rcHeightfield(); int width; ///< The width of the heightfield. (Along the x-axis in cell units.) int height; ///< The height of the heightfield. (Along the z-axis in cell units.) float bmin[3]; ///< The minimum bounds in world space. [(x, y, z)] float bmax[3]; ///< The maximum bounds in world space. [(x, y, z)] float cs; ///< The size of each cell. (On the xz-plane.) float ch; ///< The height of each cell. (The minimum increment along the y-axis.) rcSpan** spans; ///< Heightfield of spans (width*height). rcSpanPool* pools; ///< Linked list of span pools. rcSpan* freelist; ///< The next free span. private: // Explicitly-disabled copy constructor and copy assignment operator. rcHeightfield(const rcHeightfield&); rcHeightfield& operator=(const rcHeightfield&); };
2.2 过滤掉不可行走的三角面
首先我们需要找到与当前 Tile 相交的三角面,可以借助到前面构建的 BVH 结构,BVH 的结构如下:
///BVH的节点 struct rcChunkyTriMeshNode { float bmin[2];///包含区域内所有三角形的包围盒 float bmax[2]; int i;///i为正表示是叶子节点;i为负表示是非叶子节点,大小等于在数组内的覆盖范围 int n;///节点内包含的三角形个数 }; ///一棵BVH树 struct rcChunkyTriMesh { rcChunkyTriMeshNode* nodes;///根节点 int nnodes;///节点个数 int* tris;///按区域划分排序后的三角形集合 int ntris;///三角形个数 int maxTrisPerChunk;///叶子节点最多包含的三角形数 }
我们只需要遍历 BVH 树,判断当前节点的【投影】包围盒与 Tile 的 【投影】包围盒是否相交,以此筛选满足条件的节点,这样比遍历所有三角面要快的多。
找到符合条件的节点后,遍历所有节点内的三角面,找到可以行走的三角面。这里主要根据配置的 Max Slope ,该值表示 agent 可以行走的斜坡的最大角度是多少,当三角面的角度大于该值,表示 agent 也无法行走上去,因此可以剔除掉该三角面。
2.3 体素化三角面(rasterizeTri)
体素化三角面主要遍历所有三角面转换成空间内的体素集,这里将地图的信息从三角面再拆分到体素盒子。这里针对体素化单个三角面的流程进行介绍。
- 找到三角形的 AABB 包围盒(三维空间的包围盒,被定义为包含该对象,且边平行于坐标轴的最小六面体)
- 计算三角形的高度
- 按投影的 XZ 平面切割三角形(每次切割的单位长度都是一个 Cell Size,也就是一个体素盒子的长度)
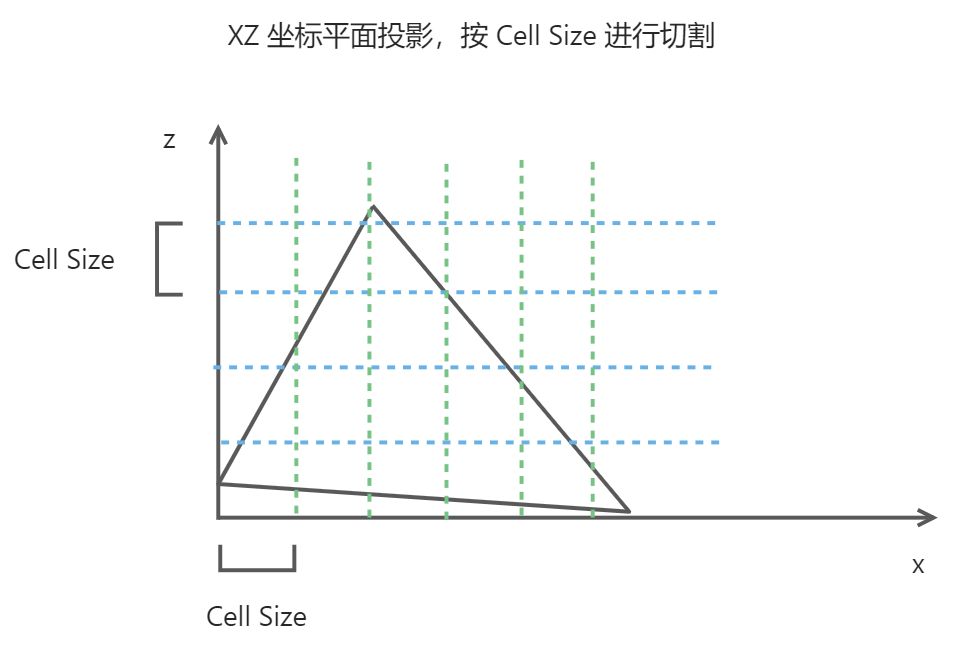
- 计算切割后的格子中,点坐标的最高值和最小值(XZ切割后与面的相交点坐标),作为 Span 的高度。
- 在同个 XZ 坐标下的 Span 如果间距小于一定值会被合并,且如果其中一个 Span 为可行走的,则合并后的 Span 也为可行走的。Span 链表都是按高度从低到高排序的, Span 有多个邻居时,取高度最高的,
体素化后的三角面效果大致如下:

最终建立的高度场效果如下:

每个 Span XZ 长度固定(Cell Size), Y 轴方向包含一个最大值和最小值, 同一个 XZ 坐标会有多个span,同一个 XZ 坐标处的所有 Span 形成一个链表,并且按高度排序(从小到大)
3. Filter walkables surfaces
过滤可行走表面,主要分为 3 步:
- 过滤可行走的障碍物
- 过滤四周都无法行走的 Span
- 过滤同个 XZ 坐标下,Span 之间高度差较小的 Span
不可行走的 Span 都会标记为 RC_NULL_AREA
3.1 标记同个 XZ 坐标下可攀爬的 Span(rcFilterLowHangingWalkableObstacles)
根据同一个 XZ 坐标不同 Span 之间,如果它们的距离小于 walkableClimb ,并且下面的 Span可走,则把上面的 Span 也标记成可走, 即处理台阶楼梯之类的情形
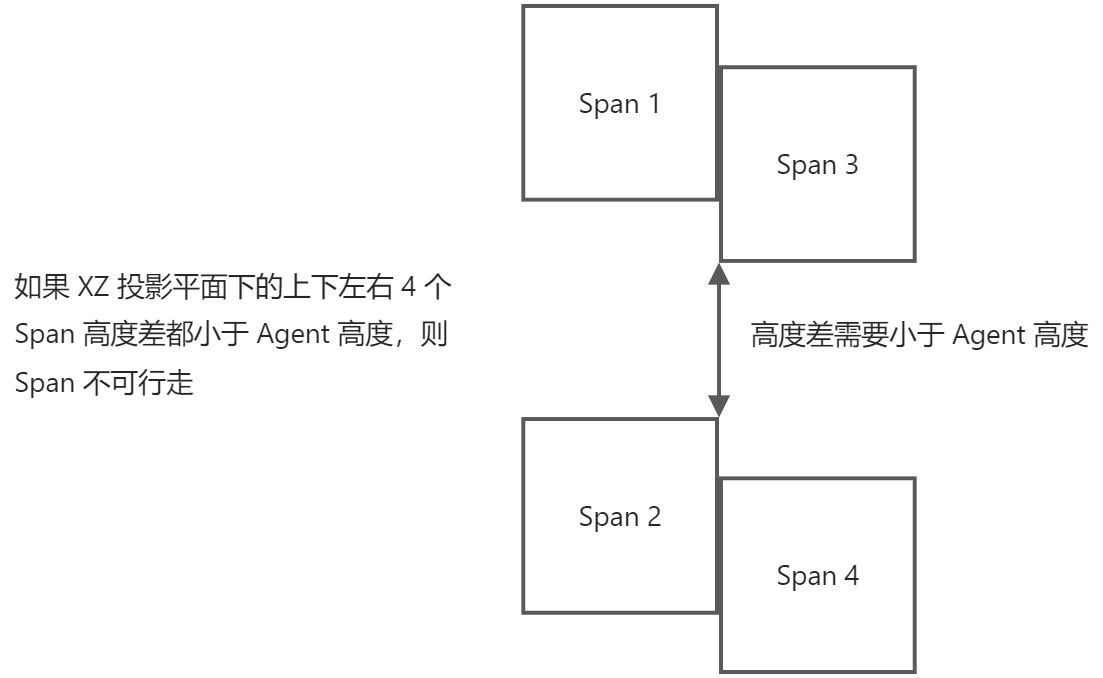
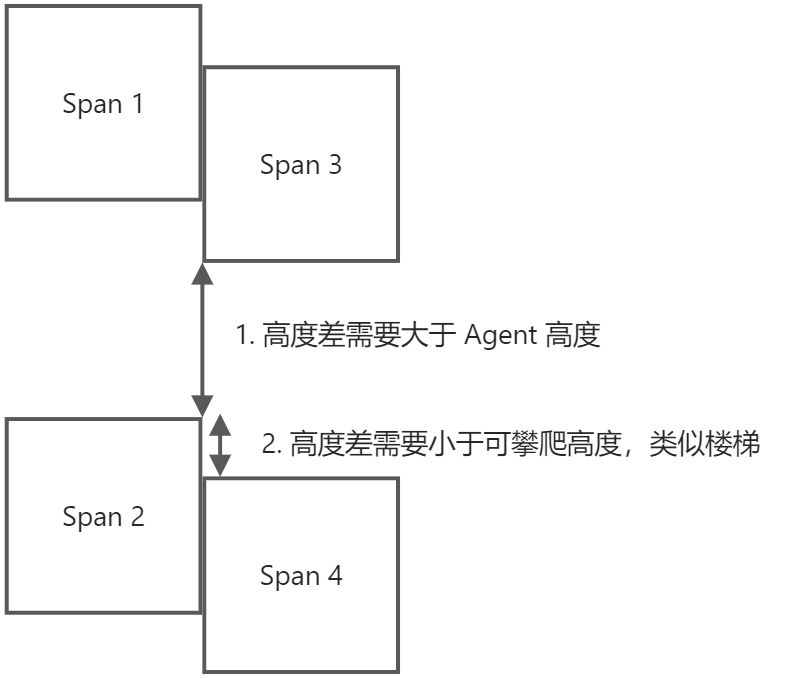
3.2 过滤周围高度较低的 Span(rcFilterLedgeSpans)
和周围的 Span 比较,Span 的高度差是否大于 Agent 高度,小于 Agent 高度,说明不够高,无法行走,如果 Span 的 4 个方向都不满足,该 Span 也会被判断定为不能走。如下
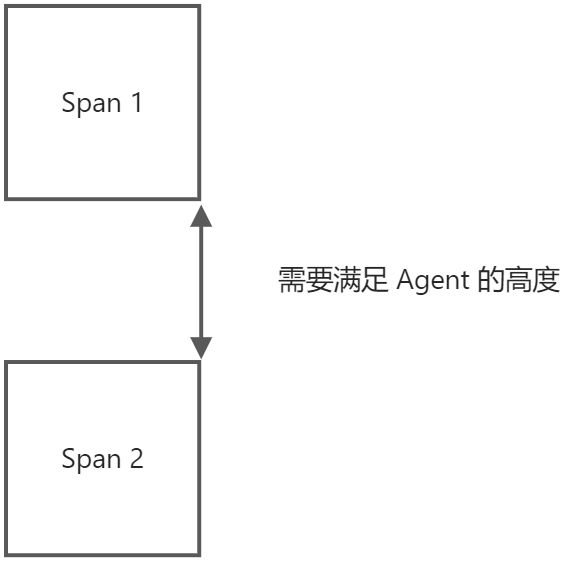
3.3 过滤开放空间高度过小的 Span(rcFilterWalkableLowHeightSpans)
判断当前格子所形成的空间,是否足够高(> Agent 高度),不够高也判断为不可走,如下图所示,同一个 XZ 坐标上,一系列的 Span 之间的高度差要足够
4. Partition walkable surface to simple regions
这一步是生成导航网格中最复杂的一步,处理比较多。
4.1 将高度场转换为紧缩高度场(rcBuildCompactHeightfield)
高度场中的 Span 是三角面的体素集,是【实心】的部分,而紧缩高度场实际上就是将【实心】区域之间的【空心】区域取出来,每个【紧缩空间】的起始位置是一个 【实心空间】的可行走顶部,高度是【空心】区域的连续高度。大致如下所示,CompactSpan 就是我们的 【紧缩空间】,因此【紧缩高度场】其实就是【紧缩空间】的集合。
理论上【实心区域】实际上只需要其表面,主要还是为了获取【空心区域】而构建的。

获取到所有 CompactSpan 之后,再计算每个 CompactSpan 与它的 Neighbor Compact Span 的【联通性】(XZ 平面下,上下左右 4 个方向)。判断【联通性】的条件其实与前面过滤可行走 Span 的操作有些类似,主要有两个条件,如下所示:
一个 CompactSpan 与周围 Neighbor Compact Span【联通性】数据保存主要存放在 rcCompactSpan 结构中的 con 字段,该字段长 24 bit,每个方向占 6 bit,比如 con 字段的二进制值为 000001 000010 000000 000100 时,意义如下:
- 左方向,该 Span 与 layer id 为 1 的 Span 连通
- 上方向,该 Span 与 layer id 为 2 的 Span 连通
- 右方向,该 Span 无连通 Span
- 下方向,该 Span 与 layer id 为 4 的 Span 连通
layer id 指在该 XZ 坐标下,可能有多个 Compact Span,因此 layer id 用来区分是第几层的 Span。
对于这 4 个方向,recast 也有自身的定义
// 对于 (0,0) 的坐标 (1,0) Direction 0 = (-1, 0) 左 (-1,0) (0,0) (0,1) Direction 1 = (0, 1) 右 (0,-1) Direction 2 = (1, 0) 上 Direction 3 = (0, -1) 下
转换为紧缩高度场后,其数据结构定义有所变化。
- 【紧缩高度场】保存了每个 XZ 坐标的格子(数组保存),定义为
struct CompactCell,主要记录该 XZ 坐标上有几个 CompactSpan,其次可以通过数组索引快速定位到某个 Span - 【高度场】中的
struct rcSpan采用【链表】结构保存,而【紧缩高度场】则采用【数组】结构保存struct rcCompactSpan,这样索引的效率也更快,假设索引坐标为 (1,2)上的第 N 个 CompactSpan,只需要 (1+2*width)+ N 即可直接得到索引
紧缩高度场的数据结构完整定义如下:
/// Provides information on the content of a cell column in a compact heightfield. struct rcCompactCell { unsigned int index : 24; ///< Index to the first span in the column. XZ 平面下的坐标,参考右图 unsigned int count : 8; ///< Number of spans in the column. 8 位,理论上不会超过 256 个 Span }; /// XZ 平面投影下,一个格子就是一个 Cell /// ------------- /// |1 |2 |3 |4 | /// ------------- /// |5 |6 |7 |8 | /// ------------- /// Represents a span of unobstructed space within a compact heightfield. struct rcCompactSpan { unsigned short y; ///< The lower extent of the span. (Measured from the heightfield's base.) unsigned short reg; ///< The id of the region the span belongs to. (Or zero if not in a region.) unsigned int con : 24; ///< Packed neighbor connection data. 与 Neighbor Span 的连通性,这里 24bit,每 6 bit 一个方向() unsigned int h : 8; ///< The height of the span. (Measured from #y.) }; /// A compact, static heightfield representing unobstructed space. /// @ingroup recast struct rcCompactHeightfield { // some define float bmin[3]; ///< The minimum bounds in world space. [(x, y, z)] float bmax[3]; ///< The maximum bounds in world space. [(x, y, z)] float cs; ///< The size of each cell. (On the xz-plane.) float ch; ///< The height of each cell. (The minimum increment along the y-axis.) rcCompactCell* cells; ///< Array of cells. [Size: #width*#height] Cell 的合集,这里采用一维数组表示 rcCompactSpan* spans; ///< Array of spans. [Size: #spanCount] 所有数组的合集,这里采用一维数组表示 unsigned short* dist; ///< Array containing border distance data. [Size: #spanCount] 记录距离场 unsigned char* areas; ///< Array containing area id data. [Size: #spanCount] 记录区域是否可行走,或者草地山地等情况 };
CompactSpan的集合存放在 rcCompactHeightfield.spans 。
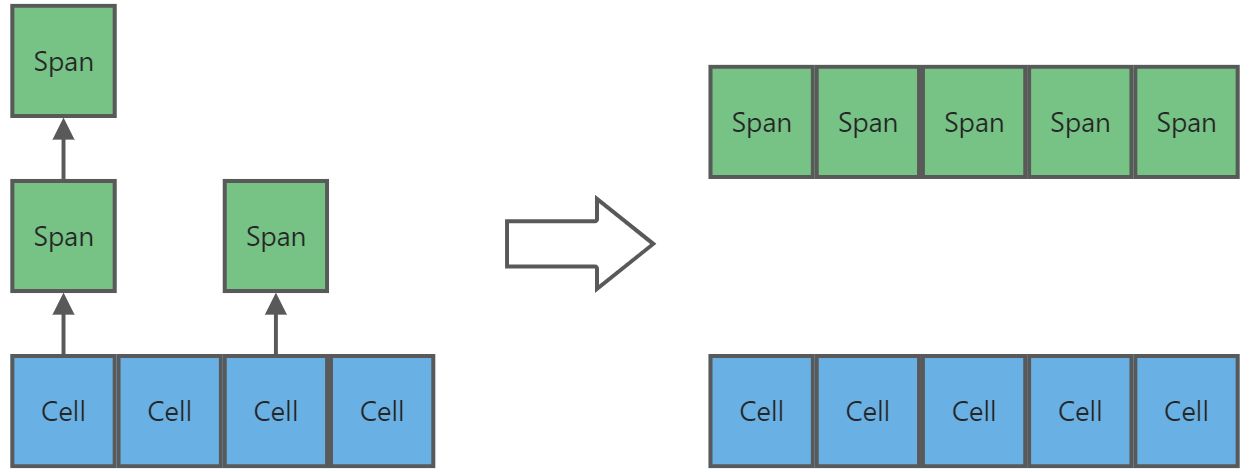
4.2 用玩家模型半径修剪可行走区域边界(rcErodeWalkableArea)
这里主要对边界区域进行裁剪,目的主要是为了让玩家模型和边界保留一定距离(防止贴着墙走,穿模到墙内),这里主要需要如下操作(现在开始这里的 Span 均指 CompactSpan):
- 筛选【边界 Span】,Span 需要满足 【Neighbor Span 数量小于 4】(比如地图边界或者在柱子旁) 条件
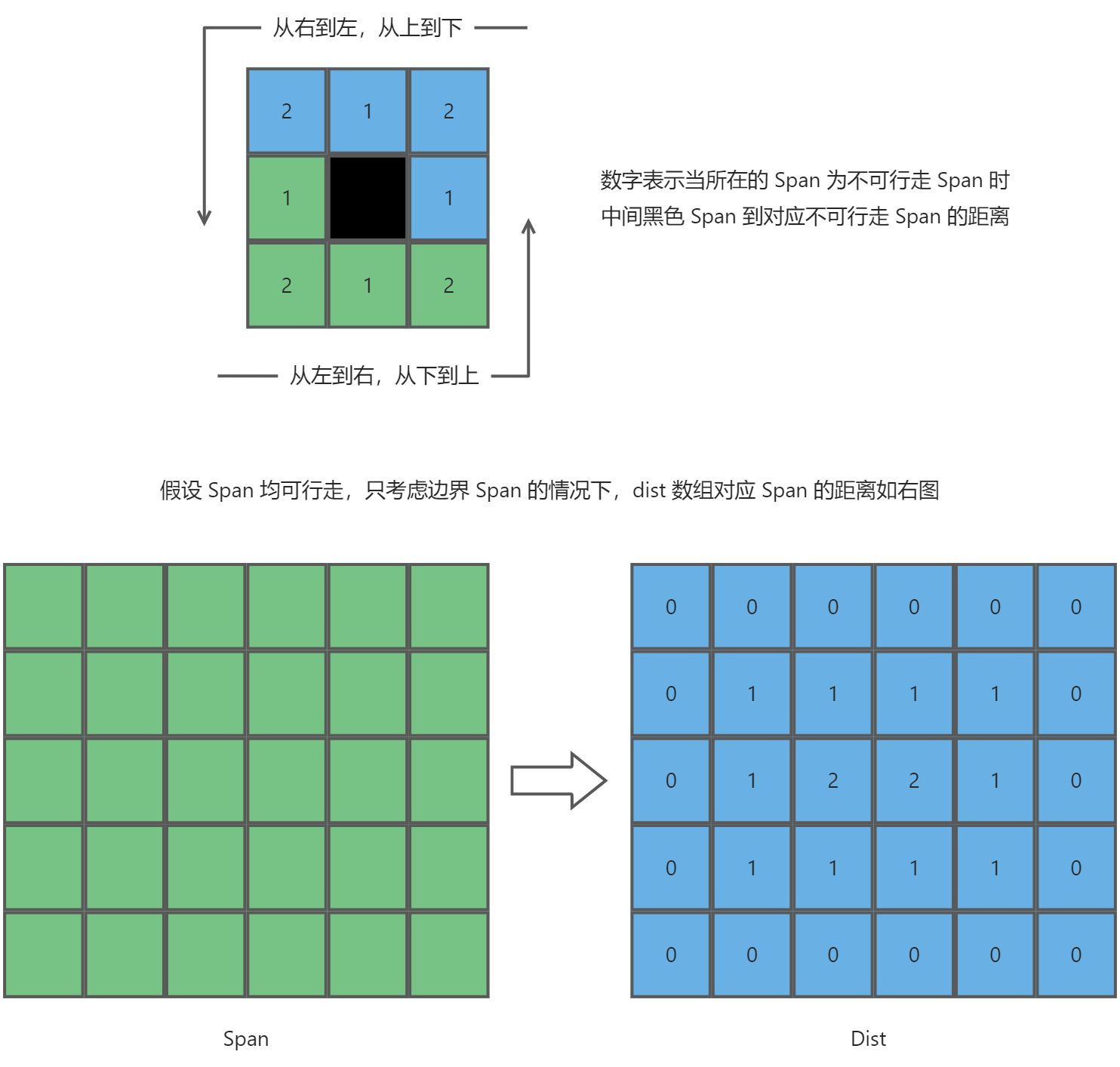
- 新增一个 dist 整型数组(长度为 Span 的数量),记录可行走 Span 与上述筛选出来的 Span 的距离(单位是体素盒子),第一步筛选出来的 Span 的 dist 值均设置为 0,其他 Span 默认值为 255
- 分【两次】遍历,第一次从左下角到右上角遍历 XZ 平面每个格子的 Span ,用当前 Span 下半部分的 4 个格子更新 dist 数组(比较格子与 Span 的大小,取 min 值作为 dist 值),第二次从右上角向左下角遍历 XZ 平面每个格子,用当前 Span 上半部分的 4 个格子更新 dist 数组
- 遍历 dist 数组,将对应 Span 的 dist 距离小于(角色半径 / Cell Size)的 Span 都设置为不可行走
4.3 自定义区域(可选功能)
目前为止,其实只有 2 种 area id,可行走和不可行走,RecastDemo 提供了一种功能,通过射线绘制多个点,形成多面体,多面体包围的区域会被设置为对应的 area,如下图,不同区域包围的 voxel 颜色不一样(不同颜色表示不同的 area id)

主要通过 RecastArea::rcMarkConvexPolyArea 接口进行设置,该功能为可选功能,这里只做简要介绍。
4.4 对紧缩高度场进行区域划分
构建距离场
在对区域进行划分之前,需要构建距离场,其步骤与 4.2 用玩家模型半径修剪可行走区域边界 中构建的 dist 数组基本一致,唯一的区别是对 【非边界 Span】的定义,前者需要前后左右 4 个方向都存在连通邻居,而现在还有一个额外条件,连通邻居的 area id 也需要与当前 Span 的 area id 相同。

模糊降噪处理
距离场的 dist 数组构建完成之后,接下来对 dist 数组进行模糊降噪处理,具体做法是:
遍历 Span 的 8 个邻居 Span,合计 9 个 Span,(dist[1] + ... dist[9]) / 9,当某个邻居不连通时,则用自身的 Dist 值补上。然后将计算出来的值作为当前 Span 新的 Dist 值。
区域划分
Recast 中提供的区域划分算法主要分为三种:
- 分水岭(watershed) :recast默认算法,效果好,速度慢。
- Monotone:速度快。但是生成的 Region 可能会又细又长,效果一般。
- layers:类同monotone,只是区域在生成过程中不会有叠层(不会跨相同x、z坐标的多个y坐标体素)
这里只针对默认的分水岭算法介绍。大致流程如下:
- 首先对当前区域根据前面构建的距离进行划分,默认情况下如果区域过大(距离场中最大的距离 maxDist > 16),会划分为 maxDist / 16 次进行处理
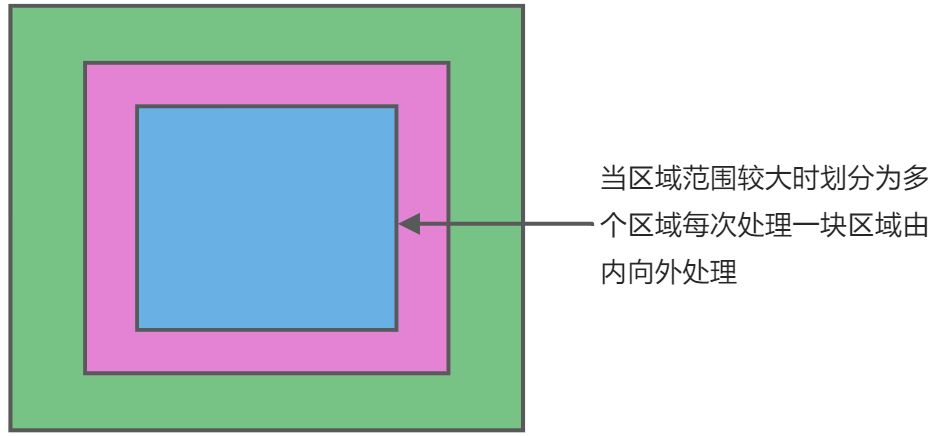
- 选定好区域之后,对区域内的 Span 进一步划分,拆分到 8 个 数组中(这里的拆分根据距离来,如 dist 值为 0~2 的存放到一个数组,2~4 为一个数组,以此类推)
- 首先对最中心的区域(距离最远的那个数组)先调用
floodRegion进行注水,floodRegion函数做的事情:以一个 Span 作为起始点,按 4 邻域泛洪填充它所能扩展到的区域(填充操作就是给 Span 设置 Region id),每次处理新的节点时,会先判断它的 8 个邻接节点是否已经有了更早的填充标记,如果有,则说明当前节点处于区域相交处,先跳过该节点 - 接着遍历下一个数组,先检查能否通过
expandRegion合并到之前的区域中,合并条件是两个 Span 是否有相同的 area_id (目前来看除了不能行走的区域,area id 应该都是相同的),有则合并 expandRegion完毕后检查有没有 Span 仍然没有 region id,如果有,说明 area id 不一样,再对其进行floodRegion注水操作- 以此类推,直到所有区域的数组遍历操作完毕,区域也就划分完了
这里附上一张参考图片(来源):

5. Trace and simplify region contours
这一步主要从体素面转换为多个顶点集合(即从上一步中划分出来的区域,将其简化成轮廓),同时对区域进行简化,较小的区域合并到其他区域(如果可以合并的话)。
5.1 合并较小的 Region
- 先获取每个 Region 的邻接 Region
- 对于 Region 中 Span 数量小于
minRegionArea配置值的,认为该 Region 需要 Merge 到其他 Region - 遍历需要 Merge 的 Region 的邻接 Region,检查能否合并,能则合并。假如对 region a 合并到 region b ,合并的前提需要 b 没有 merge 过其他 region。
5.2 寻找 Region 之间相邻的 Span
遍历紧缩高度场中的 Span,根据 Region id(区域标记)求出每个 span与周围相邻 Span 的区域关系,用一个 4 位的 2 进制数来表示,如果相邻 Span 为同个 Region,则对应的标记记为 0,这样最后得到的 flag 若为0,则表示是一个区域内部的span (4 面都是同一个 Region),否则就是一个区域边界上的 span
5.3 获取 Region 边界的轮廓顶点集(walkContour)
前面已经获取到所有 Region 之间相邻的 Span,接下来遍历 Span,具体流程如下:
- 以一个边界span作为起始位置,【顺时针方向】判断它的4条边:
- 若当前边是区域分界边,则将边的一个顶点加入到轮廓顶点集中,并继续判断下一条边
- 若当前边不是区域分界边,则移动到与这条边相邻的 Span中(这个 Span 是在同一个区域内),重新判断新的 Span的边(重新顺时针方向依次判断)
如下图

5.4 简化轮廓顶点集(simplifyContour)
简化的目的是使用尽可能少的直线段来逼近带毛刺的边界。整个简化过程如下:
- 左下角和右上角顶点作为初始轮廓
- 对于轮廓线段,遍历线段中间的其它顶点,找到偏离线段最远的顶点,如果偏离距离大于指定值,则将该顶点加入轮廓
- 一直迭代,直到所有顶点与轮廓的距离在指定值内

5.5 合并轮廓中的空洞
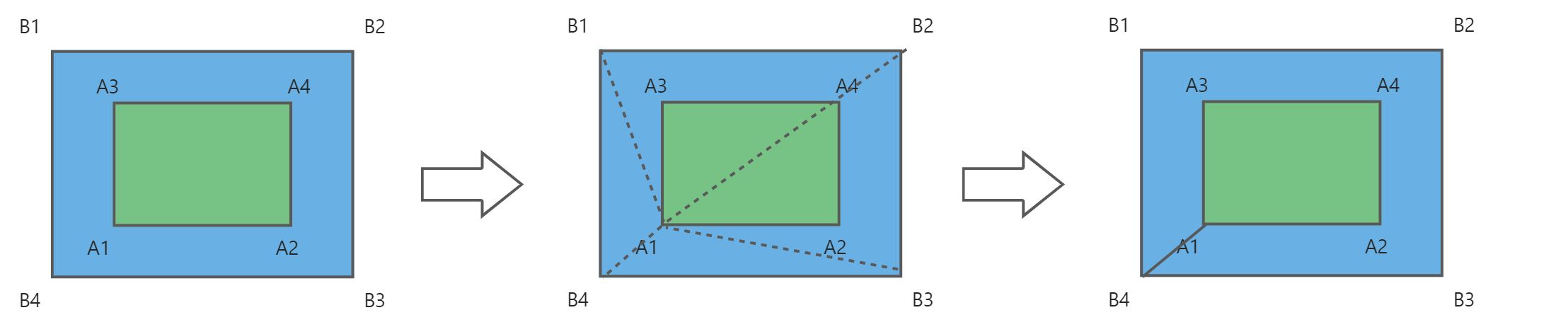
可能出现如下情况,轮廓中出现一个空洞(空洞其实是另一个轮廓),这种需要将其合并为一个轮廓,以下图为例:
- 首先找到空洞的左下角顶点 A1
- 将轮廓 B 的 4 个顶点都与 A1 相连,形成 4 条线段
- 去掉所有与空洞相交的线段,此时剩下 B1-A1,B3-A1,B4-A1 三条线段
- 选择最短的线,至此轮廓的顶点序列从 B1 B2 B3 B4 变为 B1 B2 B3 B4 A1 A3 A4 A2
6. Build polygons mesh from contours
我们需要将顶点集组成的多边形转换成凸多边形(凸多边形可以保证内部任意两点均可达),主要步骤如下:
- 先进行三角剖分,三角形为最简单的凸多边形
- 三角形合并多新的凸多边形(合并可以提升寻路的效率,减少了需要检索的凸多边形)
- 计算凸多边形的邻接关系
6.1 三角剖分
Recast 中采用了一种叫做 EarClipping 的算法进行裁剪,其主要接口为 static int triangulate(int n, const int* verts, int* indices, int* tris)。
首先有一个【耳尖】的定义:该顶点是一个凸点,且左右顶点相连的对角线与其他边不相交,比如有 v1 v2 v3 连续顶点,v1 和 v3 对角线不与其他边相交,v2 为凸点,则 v2 为耳尖。如下图:
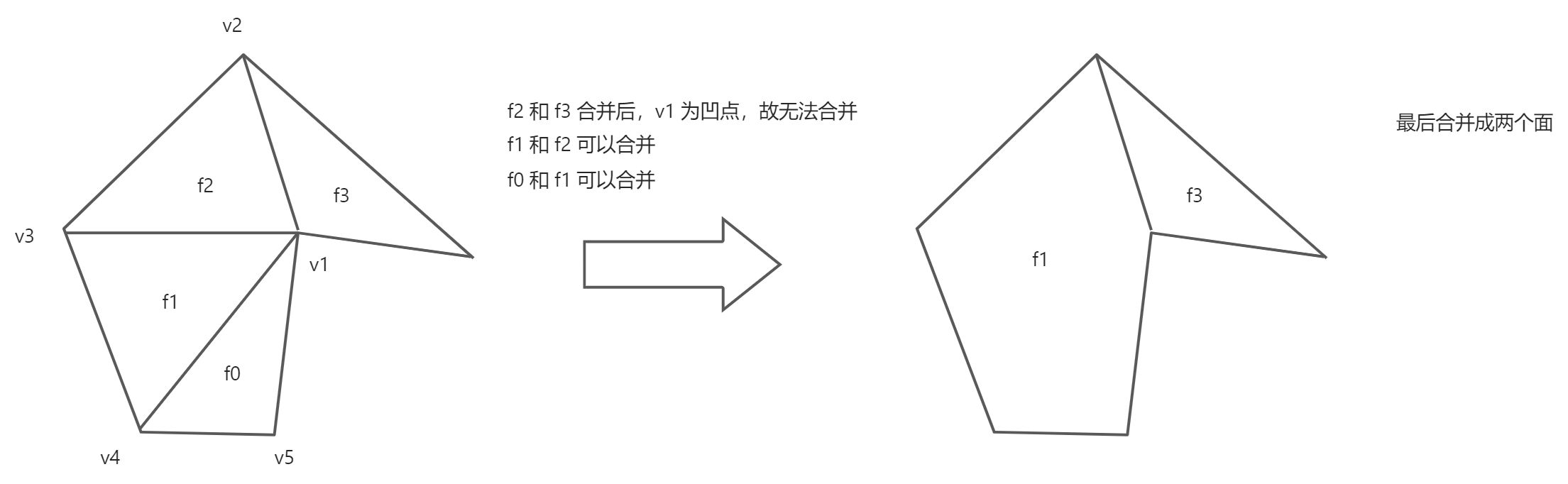
6.2 凸多边形合并
为了提升效率,这里再将多边形进行合并,合并的条件如下:
- 首先两个多边形需要邻接,有公共边
- 合并后公共边的两个顶点需要为凸点(不然又变成了凹多边形)
参考下图:
6.3 凸多边形邻接关系
先得到所有多边形的边,用 链式前向星 的方式存起来(每个点记录以它为起始点的边),然后遍历所有边,对每条边设置以它为公共边的多边形的邻接信息,邻接信息是跟多边形的顶点信息存在一起的,在 rcPolyMesh这个结构体里,每个区域轮廓对应一个 rcPolyMesh,内部包含了这个轮廓内的所有凸多边形
struct rcPolyMesh { unsigned short* verts; ///所有多边形的顶点,注意这里顶点的坐标不是实际坐标,而是网格坐标 unsigned short* polys; ///所有凸多边形的信息 ///polys数组长度为 多边形数量maxpolys*多边形最大顶点数nvp ///对于每个多边形,前nvp个数存顶点id,后nvp个数存与它相邻的多边形id(n个顶点最多与n个多边形相邻) };
至此,基本完成了可以支撑寻路的的 Mesh 结构,但是仍存在一些问题,参考第七步
7. Create detail mesh which allows to access approximate height on each polygon
这一步的主要接口如下:
/// @par /// /// See the #rcConfig documentation for more information on the configuration parameters. /// /// @see rcAllocPolyMeshDetail, rcPolyMesh, rcCompactHeightfield, rcPolyMeshDetail, rcConfig bool rcBuildPolyMeshDetail(rcContext* ctx, const rcPolyMesh& mesh, const rcCompactHeightfield& chf, const float sampleDist, const float sampleMaxError, rcPolyMeshDetail& dmesh)
这一步事实上是可选的,理论上第6步输出的结果已经可以支持寻路算法了,但是第六步生产的 Mesh 会有一种情况,如下:

轮廓包围的区域,中间高,四周低,生产的 PolyMesh 与实际的地表高度并不匹配,因此这里需要加入高度相关的计算对其进行修整,将轮廓高度差距过大的部分再进行裁剪成更精细的多边形。
7.1 获取多边形的高度(getHeightData)
遍历所有的多边形,每个多边形都按 Span 来细分多边形的高度,多边形在 XZ 格子内的高度被记为该格子上与多边形 Region id 相同的 Span的高度(Region id 需要一致,同个 XZ 格子中有可能存在多个 Span)
7.2 多边形轮廓修正
- 先对多边形的每条边按一定距离裁剪成 N 段,然后对每个裁剪的点进行判断,其高度与实际的高度差距是否超过一定值,如果超过,则新增一个新的轮廓点到其实际高度上,如下图:

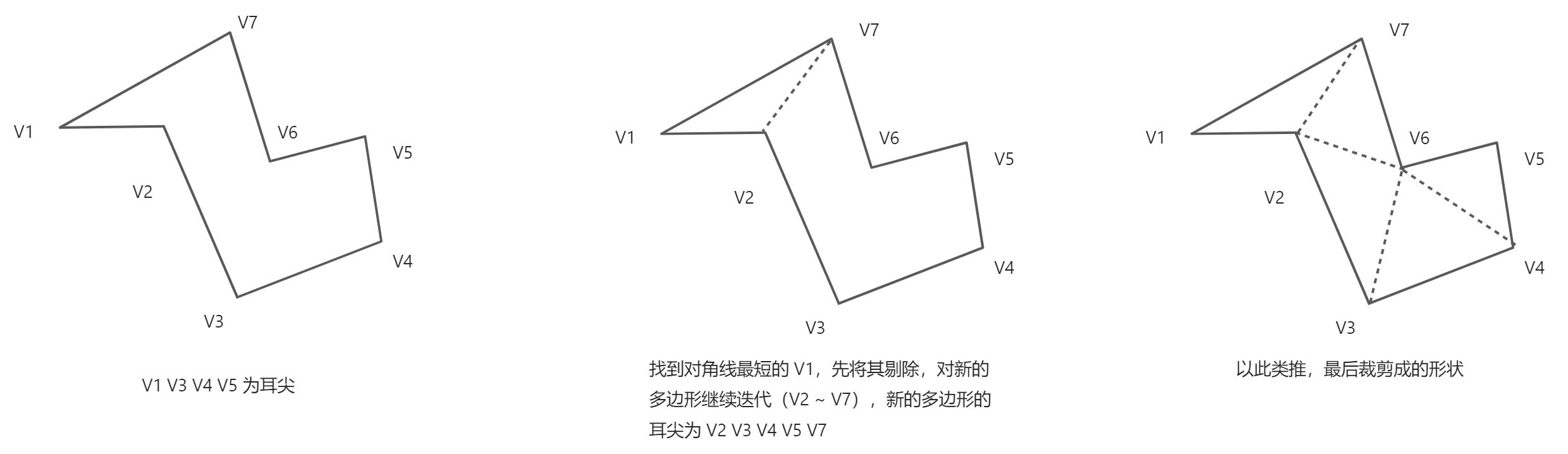
- 对新的轮廓进行三角化(三角化的方式跟 6.1 基本一致)
- 先找到轮廓中对角线最短的【耳尖】,做一次【划分】
- 【划分】就是以这个【耳尖】为中心,判断新的左【耳尖】和右【耳尖】哪个的对角线更短,取更短的再做一次划分
- 更新左右边界(会把当前的【耳尖】移出计算),重复第二步,直到三角化完成
7.3 多边形内部修正
多边形内部修正的方式基本也是 采样 -> 找出高度差大过一定值的点 -> 三角剖分 -> 重新采样 -> 找出高度差大过一定值的点 -> ...
- 设置采样点(按 XZ 坐标中设置)
- 取采样点中偏离多边形网格最大的点,用这个点对当前网格做一次三角剖分
- 重复步骤 2,直到所有采样点都在偏离的允许范围内,或者点集超过上限

7.4 效果

8. 总结
总体的流程如下:

总体来说就是将输入的三角面过滤出可行走的表面,然后对其进行区域划分(主要根据距离),收集区域的轮廓顶点集进行三角剖分,转换成可以寻路用的凸多边形,最后对凸多边形的高度进行修正(可跳过该步骤)
9. 参考资料
关于动态阻挡的处理,可以参考 动态阻挡的处理


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 被坑几百块钱后,我竟然真的恢复了删除的微信聊天记录!
· 【自荐】一款简洁、开源的在线白板工具 Drawnix
· 没有Manus邀请码?试试免邀请码的MGX或者开源的OpenManus吧
· 园子的第一款AI主题卫衣上架——"HELLO! HOW CAN I ASSIST YOU TODAY
· 无需6万激活码!GitHub神秘组织3小时极速复刻Manus,手把手教你使用OpenManus搭建本