点云配准 Registration
PCL学习笔记二:Registration (ICP算法)
PCL里有很多ICP可以用
is an ICP variant that implements the generalized iterative closest point algorithm as described by Alex Segal et al.
provides a base implementation of the Iterative Closest Point algorithm.
is a special case of IterativeClosestPoint, that uses a transformation estimated based on Point to Plane distances by default.
is an ICP variant that uses Levenberg-Marquardt optimization backend.
extends ICP to multiple frames which share the same transform.
pcl::registration::IncrementalICP< PointT, Scalar >This class provides a way to register a stream of clouds where each cloud will be aligned to the previous cloud.
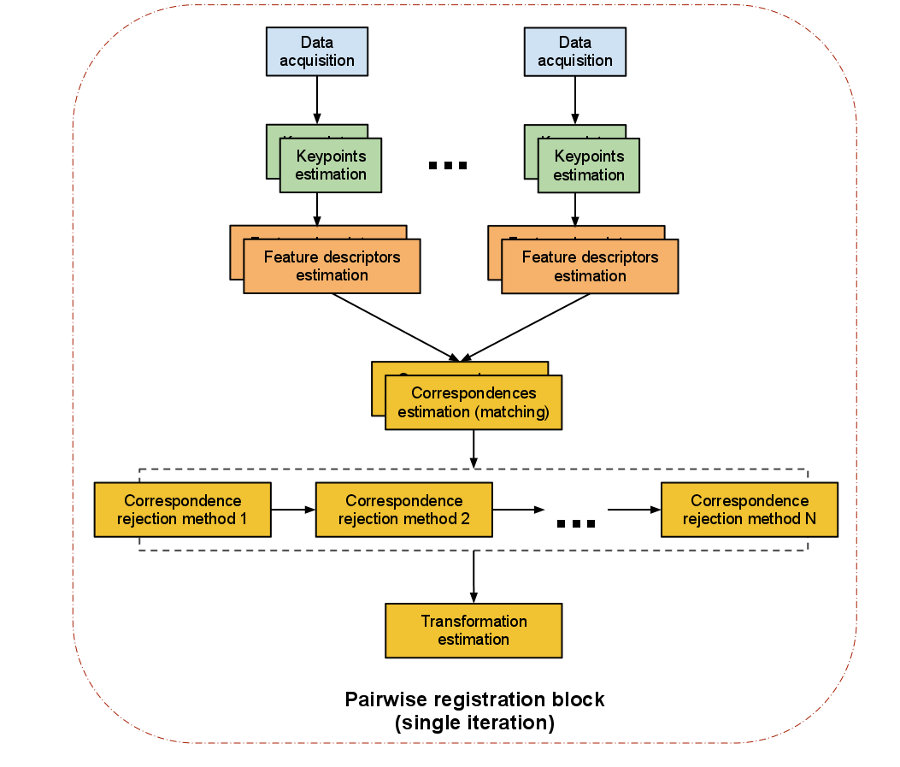
The computational steps for two datasets are straightforward:
- from a set of points, identify interest points (i.e., keypoints) that best represent the scene in both datasets;
- at each keypoint, compute a feature descriptor;
- from the set of feature descriptors together with their XYZ positions in the two datasets, estimate a set of correspondences, based on the similarities between features and positions;
- given that the data is assumed to be noisy, not all correspondences are valid, so reject those bad correspondences that contribute negatively to the registration process;
- from the remaining set of good correspondences, estimate a motion transformation.

 浙公网安备 33010602011771号
浙公网安备 33010602011771号