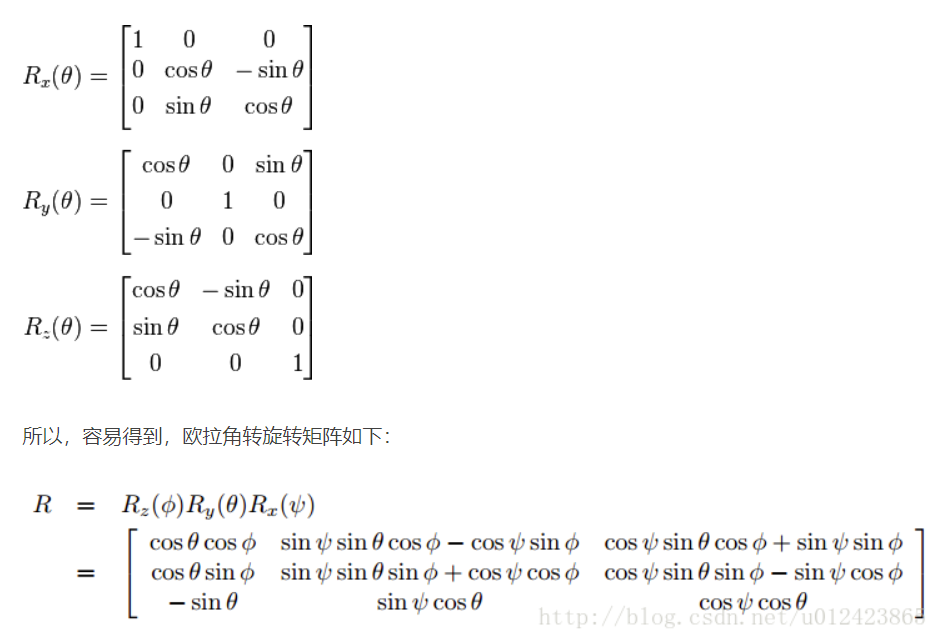
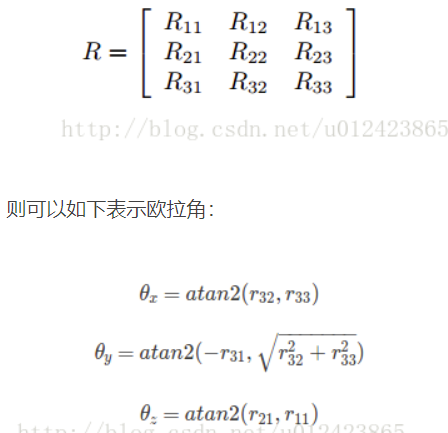
//由旋转矩阵计算欧拉角
private double[] rotationMatrixToEulerAngles(double[] M)
{
double R00 = M[0], R01 = M[1], R02 = M[2];
double R10 = M[4], R11 = M[5], R12 = M[6];
double R20 = M[8], R21 = M[9], R22 = M[10];
double sy = Math.Sqrt(R00 * R00 + R10 * R10);
bool singular = sy < 1e-6; // If
double x, y, z;
if (!singular)
{
x = Math.Atan2(R21, R22);
y = Math.Atan2(-R20, sy);
z = Math.Atan2(R10, R00);
}
else
{
x = Math.Atan2(-R12, R11);
y = Math.Atan2(-R20, sy);
z = 0;
}
x = x * 180.0 / Math.PI;
y = y * 180.0 / Math.PI;
z = z * 180.0 / Math.PI;
double[] angle = new double[3] { x, y, z };
return angle;
}



 浙公网安备 33010602011771号
浙公网安备 33010602011771号