VFH视点特征直方图
VFH(Viewpoint Feature Histogram)描述子应用于点云聚类识别和六自由度位姿估计问题
(1)训练
给定一个只包含一个物体的场景,这样方便后面聚类的得到。利用一个准确的位姿记录系统获取位姿。获取的不同视角的点云计算VFH描述子。
保存不同视角的点云,并基于此建立kdtree。
(2)测试
从给定的场景中分割提取出聚类。对于每个聚类,计算其VFH描述子。利用VFH描述子在上面建立的kdtree进行搜索查找。
VFH利用了FPFH特征优异的识别能力,同时引入视点变量以使其不受尺度变化影响,VFH是对整个点云进行处理的(输出结果只有一个直方图)。
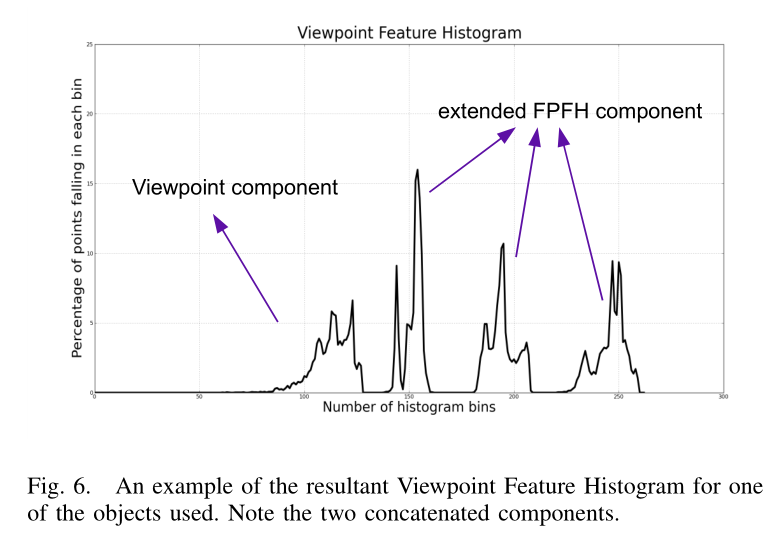
VFH特征包含两部分:
1.viewpoint direction component
计算视点方向和所有点的法向的夹角的直方图(视点方向平移到每个点处)
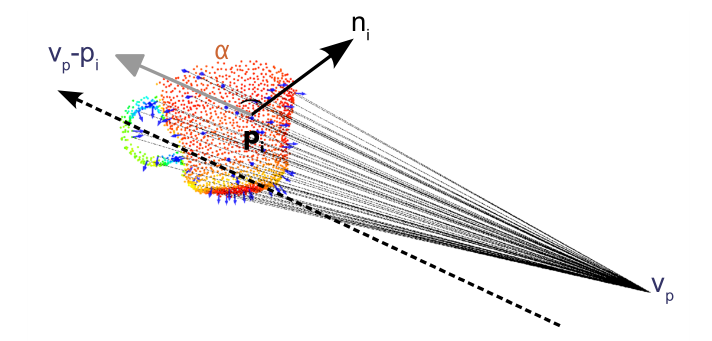
2.extened FPFH component
measure between the viewpoint direction at the centroid point and each of the normals on the surface.



// load point cloud pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>); pcl::io::loadPCDFile("D:\\pcd\\rabbit.pcd", *cloud); cout << "points size:" << cloud->points.size() << endl; clock_t t3 = clock(); pcl::NormalEstimation<pcl::PointXYZ, pcl::Normal> ne; ne.setInputCloud(cloud); pcl::search::KdTree<pcl::PointXYZ>::Ptr tree(new pcl::search::KdTree<pcl::PointXYZ>()); ne.setSearchMethod(tree); pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>); ne.setKSearch(5); //ne.setRadiusSearch(0.03); ne.compute(*cloud_normals); clock_t t4 = clock(); double time = (double)(t4 - t3) / CLOCKS_PER_SEC; cout << "calc normal time:" << time << endl; pcl::VFHEstimation<pcl::PointXYZ, pcl::Normal, pcl::VFHSignature308> vfh; vfh.setInputCloud(cloud); vfh.setInputNormals(cloud_normals); vfh.setViewPoint(0, 0, 10000); pcl::search::KdTree<pcl::PointXYZ>::Ptr tree1(new pcl::search::KdTree<pcl::PointXYZ>); vfh.setSearchMethod(tree1); pcl::PointCloud<pcl::VFHSignature308>::Ptr vfhs(new pcl::PointCloud<pcl::VFHSignature308>()); vfh.compute(*vfhs); //定义绘图器 pcl::visualization::PCLPlotter *plotter = new pcl::visualization::PCLPlotter("My Plotter"); //设置特性 plotter->setShowLegend(true); std::cout << pcl::getFieldsList<pcl::VFHSignature308>(*vfhs); //显示 plotter->addFeatureHistogram<pcl::VFHSignature308>(*vfhs, "vfh", 0, "vfh"); plotter->setWindowSize(800, 600); plotter->spinOnce(30000); plotter->clearPlots();

 浙公网安备 33010602011771号
浙公网安备 33010602011771号