
使用Python进行缺角矩形区域的流函数方程求解
 该容器为矩形,长度为6,宽度为4,其右上角被一个与轴成45°角的平板所截,位于容器的底壁上有流体的进、出口。流体通过容器流动所形成的流场可近似作为二维流处理。对于容器中的定常流场,其控制方程为:
该容器为矩形,长度为6,宽度为4,其右上角被一个与轴成45°角的平板所截,位于容器的底壁上有流体的进、出口。流体通过容器流动所形成的流场可近似作为二维流处理。对于容器中的定常流场,其控制方程为:
$$ \frac{{{\partial ^2}\psi }}{{\partial {x^2}}} + \frac{{{\partial ^2}\psi }}{{\partial {y^2}}}{\rm{ }} = 0 $$
对于上述偏微分方程,采用中心差分法来离散方程,得到偏微分方程的离散格式为:
$$\frac{1}{{{{\left( {\Delta {\rm{x}}} \right)}^2}}}\left( {{\psi _{i + 1,j}} - 2{\psi _{i,j}} + {\psi _{i - 1,j}}} \right) + \frac{1}{{{{\left( {\Delta y} \right)}^2}}}\left( {{\psi _{i + 1,j}} - 2{\psi _{i,j}} + {\psi _{i - 1,j}}} \right) = 0$$
由于使用的网格为正方形网格,故上式可变为:
\[{\psi _{i,j}} = \frac{1}{4}\left( {{\psi _{i + 1,j}} + {\psi _{i - 1,j}} + {\psi _{i,j + 1}} + {\psi _{i,j - 1}}} \right)\]
对上式使用直接法得到的迭代公式为:
\[\psi _{i,j}^{\left( {n + 1} \right)} = \frac{1}{4}\left( {\psi _{i - 1,j}^{\left( n \right)} + \psi _{i + 1,j}^{\left( n \right)} + \psi _{i,j - 1}^{\left( n \right)} + \psi _{i,j + 1}^{\left( n \right)}} \right)\]
对上式使用逐次超松弛(SOR)方法得到的迭代公式为:
\[\psi _{i,j}^{\left( {n + 1} \right)} = \left( {1 - \omega } \right)\psi _{i,j}^{\left( n \right)} + \frac{\omega }{4}\left( {\psi _{i - 1,j}^{\left( n \right)} + \psi _{i + 1,j}^{\left( n \right)} + \psi _{i,j - 1}^{\left( n \right)} + \psi _{i,j + 1}^{\left( n \right)}} \right)\]
其中\(\omega\)是松弛因子,\(\omega\)的计算方法如下:
$$\begin{array}{l}
\omega = \frac{{8 - 4\sqrt {4 - {\alpha ^2}} }}{{{\alpha ^2}}}\\
\alpha = \cos \left( {\frac{\pi }{m}} \right) + \cos \left( {\frac{\pi }{n}} \right)
\end{array}$$
\(m,n\)分别表示在划分的网格中垂直线和水平线的总数。本例中,\(m = dx = 25\),\(n = dy = 17\)。
这是程序中采用的数据插值点的图示:
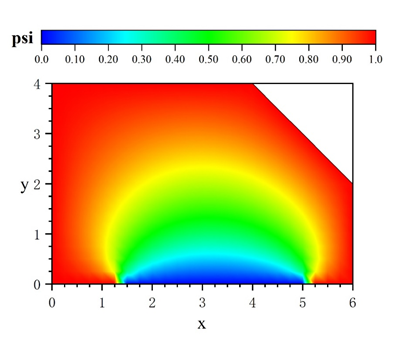
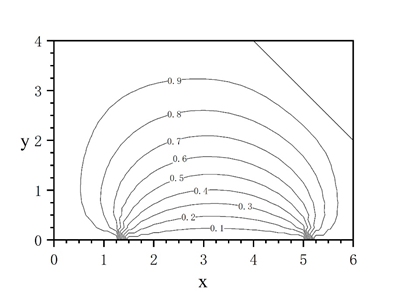
计算所得结果输入到Origin中做势函数云图,势函数云图及势函数等高线图如图所示:
|
|
Python所编程序如下,建立插值点及求解过程均包括(对于迭代误差计算的部分不太肯定,但是按照程序所写是可以正常计算的,如有高人,还望指点)。
点击查看代码
import numpy
from matplotlib import pyplot
import pandas
nx=25
ny=17
dx=6/(nx-1)
dy=4/(ny-1)
l1norm_target=1e-3
pi=3.1415926535
x= []
y= []
#########
for ylen in numpy.arange(0, 4+dy, dy):
if ylen<=2:
xlen=6
x.append(numpy.linspace(0,xlen,nx))
y.append(numpy.full((nx),ylen))
else:
xlen= 8-ylen
x.append(numpy.linspace(0,xlen,xlen/dx+1)) #####!!!!!!!!!!
y.append(numpy.full((int((xlen/dx)+1)),ylen))
##############
# 所有数据点的x坐标与y坐标
X=[]
for j in range(0,ny):
if j <= int(2/dx):
for i in range(0,nx):
X.append(x[j][i])
else:
for i in range(0,int((8-j*dy)/dx+1)):
X.append(x[j][i])
# print('X = ',X)
Y=[]
for j in range(0,ny):
if j <= int(2/dx):
for i in range(0,nx):
Y.append(y[j][i])
else:
for i in range(0,int((8-j*dy)/dx+1)):
Y.append(y[j][i])
# print('Y = ',Y)
# 定义待求的列表p_larry
p_larry= []
for ylen in numpy.arange(0, 4+dy, dy):
if ylen<=2:
xlen=6
p_larry.append(numpy.zeros(int((xlen/dx)+1)))
else:
xlen= 8-ylen
p_larry.append(numpy.zeros(int((xlen/dx)+1)))
# print('p_larry = ',p_larry)
# print(p_larry[16].shape)
# boundary condition
for a in range(0,ny):
p_larry[a][0]= 1
if a <= int(2/dy):
p_larry[a][nx-1]= 1
else:
p_larry[a][-1]= 1
p_larry[ny-1][:]= 1
p_larry[0][0:int(1.5/dx)]= 1
# p_larry[0][int(1.75/dx):int(5/dx)]= 0
p_larry[0][int(5.25/dx):nx]= 1
# 定义alpha以及omega
alpha=numpy.cos(pi/nx)+numpy.cos(pi/ny)
omega=(8-4*((4-alpha**2)**0.5))/(alpha**2)
# 定义计算域的初始场p_larryn
p_larryn=[]
for j in range(0,ny):
if j <= int(2/dx):
p_larryn.append(numpy.empty_like(p_larry[j][:]))
else:
p_larryn.append(numpy.empty_like(p_larry[j][:]))
# print('p_larry = ',p_larry)
# print('p_larryn = ',p_larryn)
a = 0
b = 0
iteration = 0
# 使用指定迭代次数的方法
# iteration_target=2000
# while iteration <= iteration_target:
# 使用指定内点上的误差和的方法
residual = 1
residual_target = 1e-3
while residual > residual_target:
p_larryn = p_larry.copy()
for j in range(1,ny-1):
for i in range(1,p_larry[j].shape[0]-1):
p_larry[j][i]=(1-omega)*p_larryn[j][i]+omega*(p_larryn[j][i-1]+p_larryn[j][i+1]+p_larryn[j-1][i]+p_larryn[j+1][i])/4
# p_larry[j][i] = ((dy**2*(p_larryn[j][i+1]+p_larryn[j][i-1])+dx**2*(p_larryn[j+1][i]+p_larryn[j+1][i]))/(2*(dx**2+dy**2)))
for a in range(0,ny):
p_larry[a][0]= 1
if a <= int(2/dy):
p_larry[a][nx-1]= 1
else:
p_larry[a][-1]= 1
p_larry[ny-1][:]= 1
p_larry[0][0:int(1.5/dx)]= 1
p_larry[0][int(1.75/dx):int(5/dx)]= 0
p_larry[0][int(5.25/dx):nx]= 1
# 使用指定内点上的误差和的方法
b += numpy.sum(p_larry[j])
a += numpy.sum(p_larryn[j])
residual = a/(b-a)
iteration += 1
print('number of iteration :', iteration)
print('residual = ', residual)
# 将计算结果转换到能与数据点的坐标相对应的列表中
P=[]
for j in range(0,ny):
if j <= int(2/dx):
for i in range(0,nx):
P.append(p_larry[j][i])
else:
for i in range(0,int((8-j*dy)/dx+1)):
P.append(p_larry[j][i])
print('P=',P)
print('sum number of iteration :', iteration)
print('the end residual = ', residual)
# 导出计算结果
All = pandas.DataFrame({
'X': X,
'Y': Y,
'P': P
})
All.to_csv("c://users//xxx//Desktop//All.csv", index=False)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号