RAW域算法处理之CFA Demosaic
主流的CMOS和CCD sensor几乎都是输出Bayer mosaic格式的RAW数据,这种数据格式是无法直接观看的,必须转换成常见的RGB或YUV格式才能被主流的图像处理软件支持。对于camera产品而言,一般还需要将RGB或YUV图像进一步转换成JPEG格式以方便进行存储。
上述图像处理过程统称图像信号处理(Image Signal Processing,ISP),广义的ISP包含了JPEG和H.264/265图像压缩处理,而狭义的ISP仅包括从RAW格式变换到RGB或YUV的处理过程。
一个典型的ISP流水线由一系列处理模块组成,这些模块首尾相连,在几百MHz的时钟驱动下同时高速运转,图像数据不断从一个模块转移至下一个模块,直到完成所有的算法处理,最终以YUV或RGB的形式从流水线的末级流出ISP。下图所示的是一个支持常见基本功能的ISP流水线。

从图中可以看到,图像数据在ISP内部经历了两次颜色空间变换,第一次变换发生在Demosaic模块,它把像素从即RAW域变换到RGB域,第二次变换发生在CSC模块,它把像素从RGB变到YUV域。下表对ISP 各模块的作用给予了简要说明。


ISP输入图像的格式
目前主流的CMOS sensor几乎都是输出Bayer mosaic格式的RAW数据。Bayer格式图片是伊士曼·柯达公司科学家Bryce Bayer(1929 –2012)发明的,拜耳阵列被广泛运用与数字图像处理领域。
常用的Bayer格式有RGGB,、GRBG、GBRG等多种,因此需要正确配置ISP以反应sensor的数据格式。

图像bayer格式介绍
bayer格式图片是伊士曼·柯达公司科学家Bryce Bayer发明的,Bryce Bayer所发明的拜耳阵列被广泛运用数字图像。
对于彩色图像,需要采集多种最基本的颜色,如rgb三种颜色,最简单的方法就是用滤镜的方法,红色的滤镜透过红色的波长,绿色的滤镜透过绿色的波长,蓝色的滤镜透过蓝色的波长。如果要采集rgb三个基本色,则需要三块滤镜,这样价格昂贵,且不好制造,因为三块滤镜都必须保证每一个像素点都对齐。当用bayer格式的时候,很好的解决了这个问题。bayer 格式图片在一块滤镜上设置的不同的颜色,通过分析人眼对颜色的感知发现,人眼对绿色比较敏感,所以一般bayer格式的图片绿色格式的像素是是r和g像素的和。
另外,Bayer格式是相机内部的原始图片, 一般后缀名为.raw。很多软件都可以查看, 比如PS。我们相机拍照下来存储在存储卡上的.jpeg或其它格式的图片, 都是从.raw格式转化过来的。如下图,为bayer色彩滤波阵列,由一半的G,1/4的R,1/4的B组成。

bayer格式图像传感器硬件
图像传感器的结构如下所示,每一个感光像素之间都有金属隔离层,光纤通过显微镜头,在色彩滤波器过滤之后,投射到相应的漏洞式硅的感光元件上。

当Image Sensor往外逐行输出数据时,像素的序列为GRGRGR.../BGBGBG...(顺序RGB)。这样阵列的Sensor设计,使得RGB传感器减少到了全色传感器的1/3,如下所示。

RAW数据格式
RAW数据的精度常见有8/10/12/14bit等规格。安防监控行业较多使用10/12bit精度的sensor,医疗行业则主要使用12bit以上精度sensor,单反和广电行业则主要使用14bit精度sensor。
当精度高于8bit时,就会自然带来如何存储和表示数据的问题。多数sensor支持固定用16bit数据表示10/12/14bit的有效数据,这种表示方法简单易行,但是在传输过程中会浪费一些带宽,在存储环节会浪费一些存储空间。
对与一些带宽和存储资源特别紧张的场合,有些sensor会支持压缩表示以节约带宽,但是这就需要ISP能够支持相应的压缩格式,否则就需要增加格式适配处理环节,无论是采用硬件还是软件方式实现都会增加系统的复杂度和成本。
另外,很多相机、摄像机产品都会在镜头光路中插入一个红外截止滤光片,其作用是允许波长小于截止频率的光进入系统,而阻止波长大于截止频率的光。常用的截止频率有630nm和650nm两种,它们允许不同程度的红光进入成像系统,因此会对白平衡和颜色校正算法产生影响,所以ISP的参数配置必须要与实际选用的截止频率相配置。
bayer格式插值红蓝算法实现
每一个像素仅仅包括了光谱的一部分,必须通过插值来实现每个像素的RGB值。为了从Bayer格式得到每个像素的RGB格式,我们需要通过插值填补缺失的2个色彩。插值的方法有很多(包括领域、线性、3*3等),速度与质量权衡,最好的线性插值补偿算法。其中算法如下:
R和B通过线性领域插值,但这有四种不同的分布,如下图所示:

(a) (b)

(c) (d)
在(a)与(b)中,R和B分别取邻域的平均值。
在(c)与(d)中,取领域的4个B或R的均值作为中间像素的B值。
bayer格式插值绿算法实现

(c) (d)
由于人眼对绿光反应最敏感,对紫光和红光则反应较弱,因此为了达到更好的画质,需要对G特殊照顾。在上述(c)与(d)中,扩展开来就是上图的(e)与(f)中间像素G的取值,者也有一定的算法要求,不同的算法效果上会有差异。经过相关的研究,
(e)中间像素G值的算法如下:

(f)中间像素G值的算法如下:

CMOS摄像头这部分转换是在内部用ADC或者ISP完成的,生产商为了降低成本必然会使得图像失真。当然用外部处理器来实现转换,如果处理器的速度足够NB,能够胜任像素的操作,用上面的算法来进行转换,皆大欢喜。不过上述算法将直接成倍提高了算法的复杂度,速度上将会有所限制。因此为了速度的提成,可以直接通过来4领域G取均值来中间像素的G值,将会降低一倍的速率,而在性能上差之甚微,算法如下:

如果能够通过损失图像的额质量,来达到更快的速度,还可以取G1、G2的均值来实现,但是这样的做法会导致边沿以及跳变部分的失真。
clc;clear;close all;
%% ------------Raw Format----------------
filePath = '../images/kodim19_8bits_RGGB.raw';
bayerFormat = 'RGGB';
width = 512;
% height= 768;
height= 512;
bits = 8;
%% --------------------------------------
file=fopen(filePath, 'r');
format = sprintf('uint8=>uint8');
bayerData = fread(file, [width height], format);
bayerData=bayerData';
%% expand image inorder to make it easy to calculate edge pixels
bayerPadding = zeros(height + 2,width+2);
bayerPadding(2:height+1,2:width+1) = uint32(bayerData);
bayerPadding(1,:) = bayerPadding(3,:);
bayerPadding(height+2,:) = bayerPadding(height,:);
bayerPadding(:,1) = bayerPadding(:,3);
bayerPadding(:,width+2) = bayerPadding(:,width);
%% main code of imterpolation
imDst = zeros(height+2, width+2, 3);
for ver = 2:height + 1
for hor = 2:width + 1
switch bayerFormat
case 'RGGB'
% G B -> R
if(0 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 1) = bayerPadding(ver, hor);
% G -> R
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% B -> R
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
% G R -> B
elseif (1 == mod(ver, 2) && 1 == mod(hor, 2))
imDst(ver, hor, 3) = bayerPadding(ver, hor);
% G -> B
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% R -> B
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
elseif(0 == mod(ver, 2) && 1 == mod(hor, 2)) %计算G的R和G的B
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% R -> Gr
imDst(ver, hor, 1) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% B -> Gr
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
elseif(1 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% B -> Gb
imDst(ver, hor, 3) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% R -> Gb
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
end
case 'GRBG'
% G B -> R
if(0 == mod(ver, 2) && 1 == mod(hor, 2))
imDst(ver, hor, 1) = bayerPadding(ver, hor);
% G -> R
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% B -> R
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
% G R -> B
elseif (1 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 3) = bayerPadding(ver, hor);
% G -> B
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% R -> B
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
elseif(1 == mod(ver, 2) && 1 == mod(hor, 2))
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% R -> Gr
imDst(ver, hor, 3) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% B -> Gr
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
elseif(0 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% B -> Gb
imDst(ver, hor, 1) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% R -> Gb
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
end
case 'GBRG'
% G B -> R
if(1 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 1) = bayerPadding(ver, hor);
% G -> R
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% B -> R
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
% G R -> B
elseif (0 == mod(ver, 2) && 1 == mod(hor, 2))
imDst(ver, hor, 3) = bayerPadding(ver, hor);
% G -> B
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% R -> B
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
elseif(1 == mod(ver, 2) && 1 == mod(hor, 2))
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% R -> Gr
imDst(ver, hor, 1) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% B -> Gr
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
elseif(0 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% B -> Gb
imDst(ver, hor, 3) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% R -> Gb
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
end
case 'BGGR'
% G R -> B
if(0 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 3) = bayerPadding(ver, hor);
% G -> B
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% R -> B
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
% G B -> R
elseif (1 == mod(ver, 2) && 1 == mod(hor, 2))
imDst(ver, hor, 1) = bayerPadding(ver, hor);
% G -> B
imDst(ver, hor, 2) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor) +...
bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/4;
% R -> B
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor-1) + bayerPadding(ver-1, hor+1) + ...
bayerPadding(ver+1, hor-1) + bayerPadding(ver+1, hor+1))/4;
elseif(0 == mod(ver, 2) && 1 == mod(hor, 2))
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% R -> Gr
imDst(ver, hor, 3) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% B -> Gr
imDst(ver, hor, 1) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
elseif(1 == mod(ver, 2) && 0 == mod(hor, 2))
imDst(ver, hor, 2) = bayerPadding(ver, hor);
% B -> Gb
imDst(ver, hor, 1) = (bayerPadding(ver, hor-1) + bayerPadding(ver, hor+1))/2;
% R -> Gb
imDst(ver, hor, 3) = (bayerPadding(ver-1, hor) + bayerPadding(ver+1, hor))/2;
end
end
end
end
imDst = uint8(imDst(2:height+1,2:width+1,:));
imshow(imDst);
figure,imshow(imDst);
title('demosaic image');
figure();imshow(uint8(bayerData));
title('raw image');

RAW域的最后一步处理是Demosaic,将像素从RAW域变换到RGB域进行下一阶段的处理。Demosaic 算法的主要难点在于,RAW域的任何一个像点(photosite)只包含一个真实的采样值,而构成像素(R,G,B)的其它两个值需要从周围像点中预测得到。既然是预测,就一定会发生预测不准的情况,这是不可避免的,而预测不准会带来多种负面影响,包括拉链效应(zipper artifacts),边缘模糊,颜色误差等。
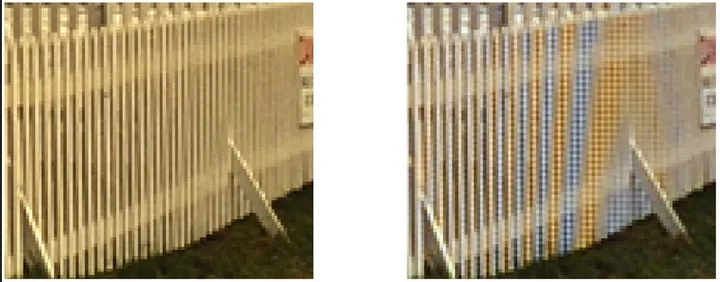
Demosaic 拉链效应和伪彩

Demosaic 伪彩
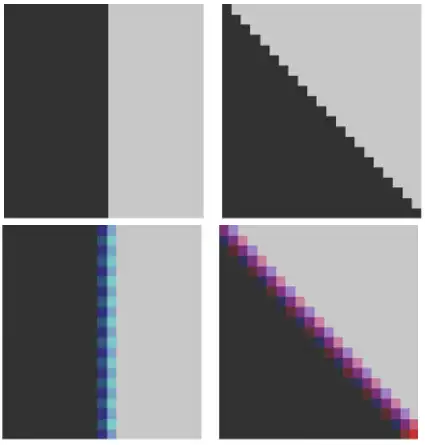
Demosaic 拉链效应,边缘模糊,伪彩。所以Demosaic 算法的主要挑战就是尽量提高算法的准确性,减少图像边缘损失和颜色误差。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号