第三章 霍夫变换(Hough Transform)
主要内容:
- 霍夫变换的作用
- 霍夫变换检测直线的原理
- 霍夫变换检测圆的原理
- OpenCV中的霍夫变换
1、霍夫变换检测直线原理
霍夫变换,英文名称Hough Transform,作用是用来检测图像中的直线或者圆等几何图形的。
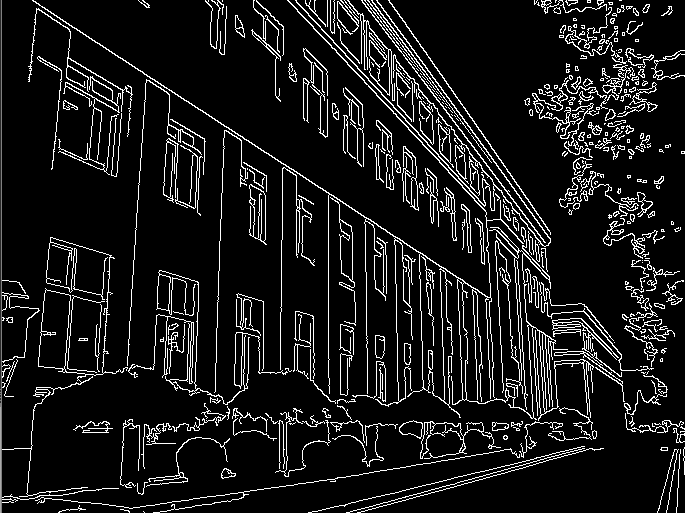
一条直线的表示方法有好多种,最常见的是 y=mx+b 的形式。 假设有一幅图像,经过滤波,边缘检测等操作,变成了下面这张图的形状,怎么把这张图片中的直线提取出来。基本的思考流程是:如果直线 y=mx+b 在图片中,那么图片中,必需有N多点在直线上(像素点代入表达式成立),只要有这条直线上的两个点,就能确定这条直线。该问题可以转换为:求解所有的(m,b)组合。
设置两个坐标系,左边的坐标系表示的是(x,y)值,右边的坐标系表达的是(m,b)的值,即直线的参数值。那么一个(x,y)点在右边对应的就是是一条线,左边坐标系的一条直线就是右边坐标系中的一个点。这样,右边左边系中的交点表示有多个点经过(m,b)确定的直线。但是,该方法存在一个问题(m,b)的取值范围太大。
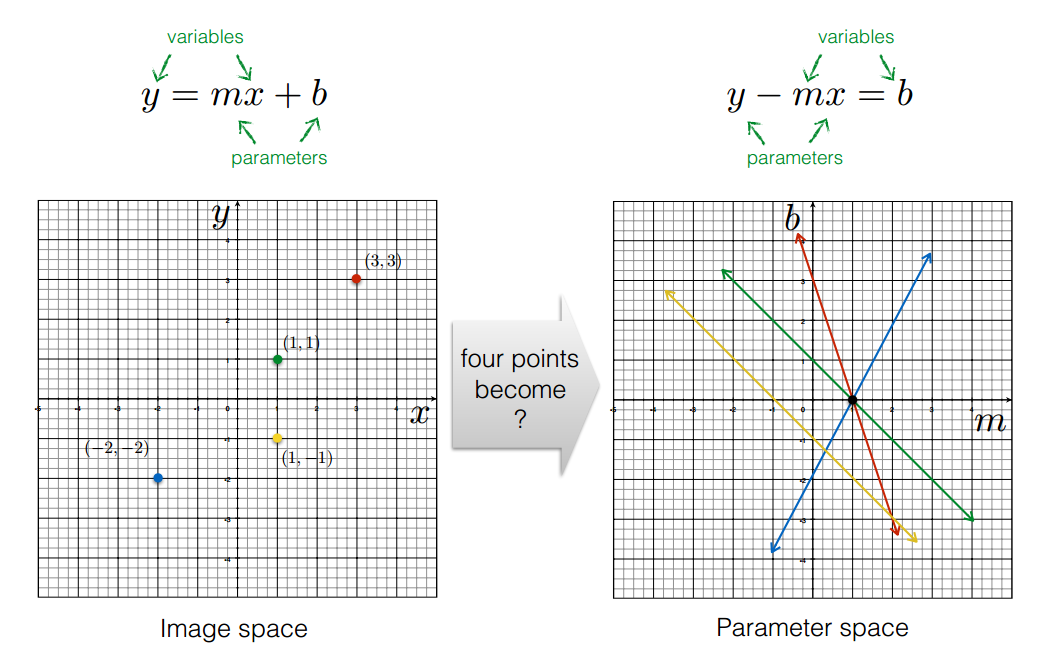
为了解决(m,n)取值范围过大的问题,在直线的表示方面用 xcosθ+ysinθ=p 的规范式代替一般表达式,参数空间变成(θ,p),0=<θ<=2PI。这样图像空间中的一个像素点在参数空间中就是一条曲线(三角函数曲线)。
Hough Line算法表述如下:
1、初始化(θ,p)空间,N(θ,p)=0 (N(θ,p)表示在该参数表示的直线上的像素点的个数)
2、对于每一个像素点(x,y),在参数空间中找出令 xcosθ+ysinθ=p 的(θ,p)坐标,N(θ,p)+=1
3、统计所有N(θ,p)的大小,取出N(θ,p)>threasold的参数 (threadsold是预设的阈值)
2、OpenCV中的HoughLines
OpenCV检测直线的方法名称为HoughLines,方法包含在 imgproc/imgproc.hpp 头文件中,方法的具体参数介绍如下
void HoughLines(InputArray image, OutputArray lines, double rho, double theta, int threshold, double srn=0, double stn=0
image:输入图像
lines:检测到的直线(表示其实为直线参数(θ,p)集合)
rho:像素每次迭代的大小(即每一次选取像素的过程跳跃多少,一般设置为1)
theta:角度累加器的大小(即选取的直线参数θ的变化),一般为CV_PI/180
thresold:阈值大小(即每个参数对至少经过的像素点数)
下面这段代码具体实现了读取图片,提取直线,并且把直线显示出来的功能,一般情况下,我们在提取直线之前会对原始图像做一次Canny边缘检测。
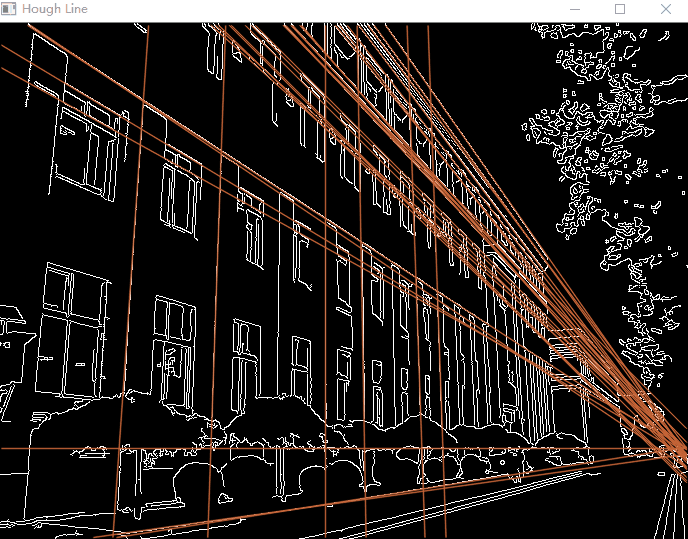
#include <iostream> #include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgproc.hpp" using namespace std; using namespace cv; int main(){ //读取图片,转换成灰度图像,并且对其执行一次高斯滤波,去除噪声点 Mat img=imread("img//yifulou.jpg"); Mat result; cvtColor(img,result,CV_RGB2GRAY); GaussianBlur(result,result,Size(3,3),1); imshow("逸夫楼",result); //Cany边缘提取 Canny(result,result,50,200,3); //利用Hough计算直线 vector<Vec2f> lines; HoughLines(result,lines,1,CV_PI/180,170); cvtColor(result,result,CV_GRAY2RGB); //为了展示需要,把灰度图像转换成RGB格式 for(size_t i=0;i<lines.size();i++){ float rho = lines[i][0], theta = lines[i][1]; Point pt1, pt2; double a = cos(theta), b = sin(theta); double x0 = a*rho, y0 = b*rho; pt1.x = cvRound(x0 + 1000*(-b)); pt1.y = cvRound(y0 + 1000*(a)); pt2.x = cvRound(x0 - 1000*(-b)); pt2.y = cvRound(y0 - 1000*(a)); line( result, pt1, pt2, Scalar(55,100,195), 1, CV_AA); } cout<<"检测到直线"<<lines.size()<<endl; imshow("Hough Line",result); cv::waitKey(); }
结果如下:(左边为经过滤波的图像,右边为检测的结果图像)

3、霍夫变换检测圆的原理
霍夫变换检测圆形的原理跟检测直线的原理是一样的。圆的表达式为 (x-a)2+(y-b)2=r2 , 把问题转换成在求解经过像素点最多的 (a,b,r) 参数对。这里分析一下图像中的一个像素点,对应参数空间的图形。如果r确定,那么一个像素点对应参数空间的一个圆,那么r不确定,则对于每一个r都是一个圆,这个图形是一个三维的圆台。如下图。
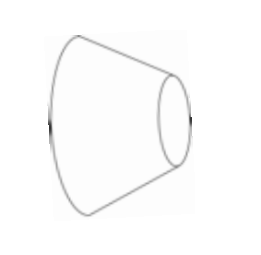
这里会发现(a,b,r)的参数空间特别大,计算量特别大。如果像素点,知道其所属的圆形的半径和指向圆心的角度,a,b其实是可以计算出来的。那么如下面这个课件上写的那样,参数空间变成了二维的,计算量大大降低。
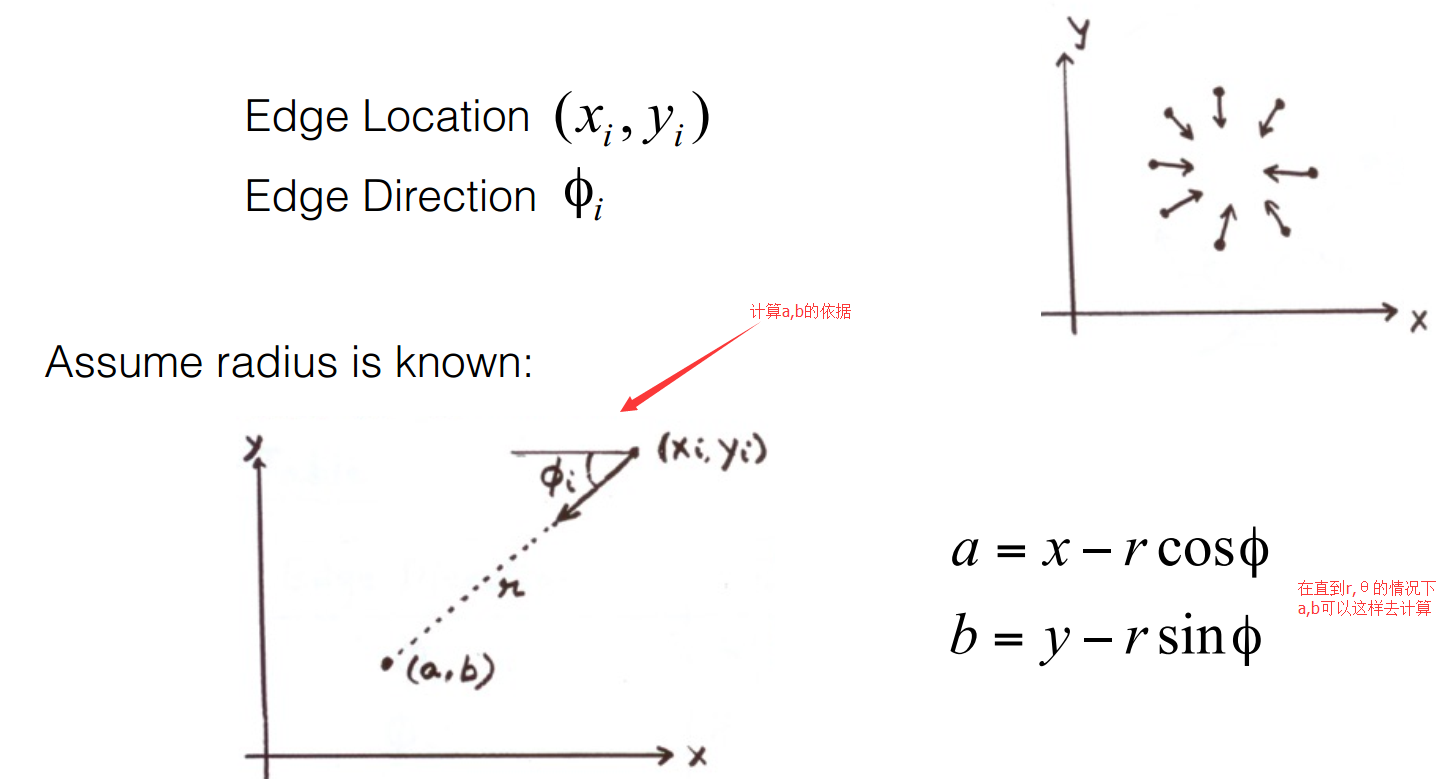
看课件上的左上角的图形,如果一个圆上的点,都沿着其梯度方向画线,那么所有线的角点就是圆心。OpenCV中的霍夫梯度算法就利用这个原理,先计算可能的圆心,然后再去计算可能的半径。OK,现在的问题是这个梯度值怎么得到,第一我们检测的圆肯定是边界,那么用Soebl算子去计算局部一位导数,肯定值是比较大的,这样可以用Sobel计算出来的梯度值去近似角度。因此。霍夫梯度检测圆形的算法如下(下面的算法描述来源于 http://blog.csdn.net/hhyh612/article/details/54947205):
I、估计圆心
1、把原图做一次Canny边缘检测,得到边缘检测的二值图
2、对原始图像执行一次Sobel算子,计算出所有像素的邻域梯度值
3、初始化圆心空间N(a,b),令所有的N(a,b)=0
4、遍历Canny边缘二值图中的所有非零像素点,沿着梯度方向画线,将线段经过的所有累加器中的点(a,b)的N(a,b)+=1
5、统计排序N(a,b),得到可能的圆心
II、估计半径(针对某一个圆心a,b)
1、计算Canny图中所有非0点距离圆心的距离
2、距离从小到大排序,根据阈值,选取合适的可能半径(比如3和3.5都被划为半径值3中)
3、初始化半径空间r,N(r)=0
4、遍历Canny图中的非0点,对于点所满足的半径r,N(r)+=1
5、统计得到可能的半径值
利用霍夫变换检测其他图形的原理也是这样。找出表达式以及参数空间,遍历图像,找出参数空间中符合要求的参数。最近,看到一个利用最小二乘去寻找圆的算法,那个算法的大致思路是列出圆形的表达式,然后通过最小二乘去求迭代求解参数值。这个方案认为更适合解决,利用图像中的点尽可能去拟合一个圆或者几个圆,不适合检测图像中有多少个圆,而且最小二乘的计算量感人。
4、OpenCV中的HoughCircles
OpenCV中的HoughCircles方法实现了检测圆形的功能。方法包含在 imgproc/imgproc.hpp 头文件中,具体方法如下
void HoughCircles(InputArray image, OutputArray circles, int method, double dp, double minDist, double param1=100, double param2=100, int minRadius=0, int maxRadius=0 )
image:输入图像
circles:检测的圆形,(a,b,r)的参数集合
method:检测使用的方法,目前OpenCV只提供了CV_HOUGH_GRADIENT方法,即霍夫梯度法
dp:图像像素分辨率与参数空间分辨率的比值(官方文档上写的是图像分辨率与累加器分辨率的比值,它把参数空间认为是一个累加器,毕竟里面存储的都是经过的像素点的数量),dp=1,则参数空间与图像像素空间(分辨率)一样大,dp=2,参数空间的分辨率只有像素空间的一半大
minDist:两个圆心之间的最小距离。这个距离设置过小,会导致本来属于一个圆上的点被分散成几个小圆,过大则导致部分小圆检测不出来
param1:CV_HOUGH_GRADIENT过程中执行Canny边缘检测的阈值
param2:参数空间阈值(即至少多少点经过该参数表示的圆)
minRadius:半径最小值
maxRadius:半径最大值
下面,这段代码实现的是在图像中检测圆形。
#include <iostream> #include "opencv2/highgui/highgui.hpp" #include "opencv2/imgproc/imgproc.hpp" using namespace std; using namespace cv; int main(){ //读取图片 Mat img=imread("img/xiaohui.jpg"); imshow("校徽",img); //执行一次高斯过滤与灰度变换 Mat copy; cvtColor(img,copy,CV_RGB2GRAY); GaussianBlur(copy,copy,Size(3,3),1); //提取圆 vector<Vec3f> circles; HoughCircles(copy,circles,CV_HOUGH_GRADIENT,1,10,100,210,0,0); for(size_t i=0;i<circles.size();i++){ Vec3i c=circles[i]; //这里用Vec3i的原因是像素点必须为int类型 circle(img,Point(c[0],c[1]),c[2],Scalar(155,50,255),3,CV_AA);//绘制圆弧 circle(img,Point(c[0],c[1]),2,Scalar(0,255,0),3,CV_AA);//绘制圆心 } imshow("circle",img); cv::waitKey(); }
代码执行的效果如下,左边为原图,右图是检测之后的图形。


5、其他参考资料
- [OpenCV入门教程之十四]OpenCV霍夫变换:霍夫线变换、霍夫圆变换合辑 浅墨、毛星云大神的文章,对于OpenCV中的HoughLins和HoughCircles方法的源码进行了简单的分析。
- OpenCV霍夫变换找圆算法 对于霍夫梯度法进行了比较详细的介绍,深入浅出。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号