
本文档主要以McalLib为例,讲述如何理解各驱动的原始用户手册,并如何从中提取信息和确定在EB中需要配置那些container以及这些container该配置为何值。具体到本实例McalLib的配置全部使用EB中的默认值即可。前期开发可以先关闭错误侦测和关闭安全模式,即xxxDevErrorDetect和xxxSafetyEnable后的框不要勾选。McalLib模块属于EB工程驱动模块的必选项。
-
概述
- MCAL库(MCALLIB)提供了一组实用程序例程供MCAL驱动程序使用。提供的服务包括ENDINIT管理、全局-本地内存地址转换、基于定时器的延迟、CPU标识符检索、TriCoreTM-intrinsic指令抽象和自旋锁。
- 文档结构说明

从文档的目录结构中,我们可以获取各模块的关键信息:
16.1.1 讲述驱动的概述。
16.1.2 讲述驱动的软件框架和硬件直接的映射关系,其中涉及到的关键硬件在16.1.2.1-16.1.2.3中列出,分别是STM, CORE_ID, SCU. 这里列出的硬件模块并不一定必须要出现在EB工程的Module Configuration 中,因为有些强相关的配置会在具体的某个驱动中隐形的集成了进去。
16.1.3 讲述了生成的c文件和脚本文件间的依赖关系。
16.1.4 讲述了集成该模块时需要注意的一些关键点,同时给出了一个demo配置,用户可以参考。
16.1.5 讲述了该驱动模块所支持的一些特有的性能。
16.2 讲述了一些关于驱动模块关键点,在EB的配置中需要注意这里提及的一些关键点。
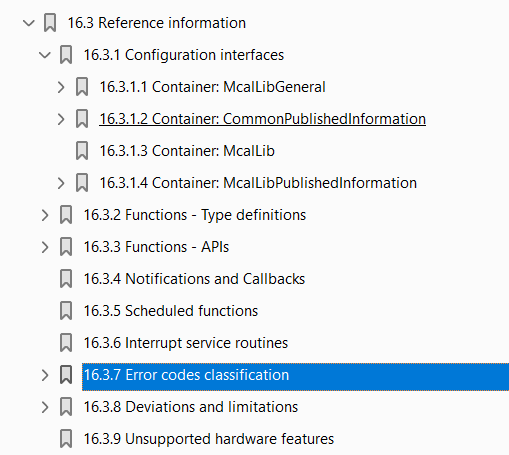
16.3.1 讲述了该驱动模块在EB中能够由用户配置的container及其子container,这些container涵盖了驱动的所有配置项,每项配置在文档里都有解释。大多数的值可以保持默认值,即配置项旁边有 这个图标。
这个图标。
16.3.2 讲述了驱动模块所涉及的数据类型。
16.3.3 讲述了驱动模块所涉及的操作函数接口。
16.3.4 讲述了驱动模块所涉及的回调通知的实现。
16.3.5 讲述了驱动模块所涉及的系统调度的实现。
16.3.6 讲述了驱动模块所涉及的中断的实现。
16.3.7 讲述了驱动模块所涉及的错误码的描述。
16.3.8 讲述了驱动模块所涉及的偏差和假设。
16.3.9 讲述了驱动模块不支持的特性。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号