一、 树
树是一种数据结构,它是由n(n>=1)个有限节点组成一个具有层次关系的集合。
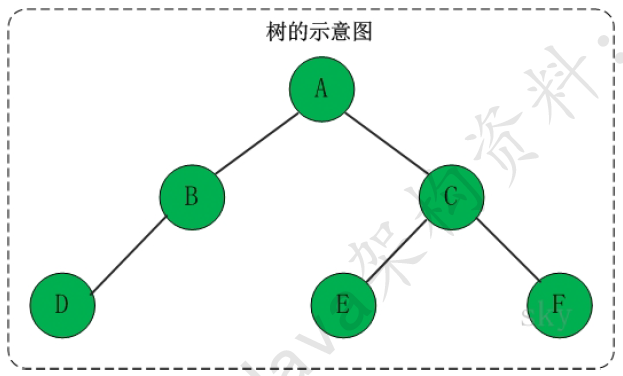
把它叫做“树”是因为它看起来像一棵倒挂的树,也就是说它是根朝上,而叶朝下的。它具有以下的特点: (01) 每个
节点有零个或多个子节点; (02) 没有父节点的节点称为根节点; (03) 每一个非根节点有且只有一个父节点; (04)
除了根节点外,每个子节点可以分为多个不相交的子树。
二、BST树
二叉树的定义
二叉树是每个节点最多有两个子树的树结构。它有五种基本形态:二叉树可以是空集;根可以有空的左子树或右子
树;或者左、右子树皆为空。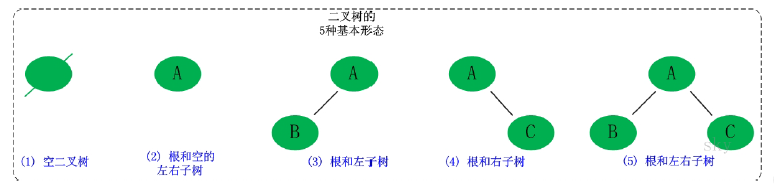
2. 二叉树的性质
二叉树有以下几个性质:TODO(上标和下标)
性质1:二叉树第i层上的结点数目最多为 2**{i-1}** (i≥1)。
性质2:
深度为k的二叉树至多有2{k}-1个结点(k≥1)。
性质3:包含n个结点的二叉树的高度至少为log2 (n+1)。
性质4:在
任意一棵二叉树中,若终端结点的个数为n0,度为2的结点数为n2,则n0=n2+1。
2.1 性质1:二叉树第i层上的结点数目最多为 2{i-1} (i≥1)
证明:下面用"数学归纳法"进行证明。
(01) 当i=1时,第i层的节点数目为2{i-1}=2{0}=1。因为第1层上只有一个根结点,所以命题成立。
(02) 假设当i>1,第i层的节点数目为2{i-1}。这个是根据(01)推断出来的! 下面根据这个假设,推断出"第(i+1)层的节点数目为2{i}"即可。 由于二叉树的每个结点至多有两个孩子,故"第(i+1)层上的结点数目" 最多是 "第i层的结点数目的2倍"。即,第(i+1)层上的结点数目最大值=2×2{i-1}=2{i}。 故假设成立,原命题得证!
2.2 性质2:深度为k的二叉树至多有2{k}-1个结点(k≥1)
证明:在具有相同深度的二叉树中,当每一层都含有最大结点数时,其树中结点数最多。利用"性质1"可知,深度为k的二叉树的结点数至多为: 20+21+…+2k-1=2k-1 故原命题得证!
2.3 性质3:包含n个结点的二叉树的高度至少为log2 (n+1)
证明:根据"性质2"可知,高度为h的二叉树最多有2{h}–1个结点。反之,对于包含n个节点的二叉树的高度至少为log2(n+1)。
2.4 性质4:在任意一棵二叉树中,若终端结点的个数为n0,度为2的结点数为n2,则n0=n2+1
证明:因为二叉树中所有结点的度数均不大于2,所以结点总数(记为n)="0度结点数(n0)" + "1度结点数(n1)" + "2度结点数(n2)"。由此,得到等式一。 (等式一) n=n0+n1+n2 另一方面,0度结点没有孩子,1度结点有一个孩子,2度结点有两个孩子,故二叉树中孩子结点总数是:n1+2n2。此外,只有根不是任何结点的孩子。故二叉树中的结点总数又可表示为等式二。 (等式二) n=n1+2n2+1 由(等式一)和(等式二)计算得到:n0=n2+1。原命题得证!
三、BST树
定义:二叉查找树(Binary Search Tree),又被称为二叉搜索树。设x为二叉查找树中的一个结点,x节点包含关键字key,节点x的key值记为key[x]。如果y是x的左子树中的一个结点,则key[y] <= key[x];如果y是x的右子树的一个结点,则key[y] >= key[x]。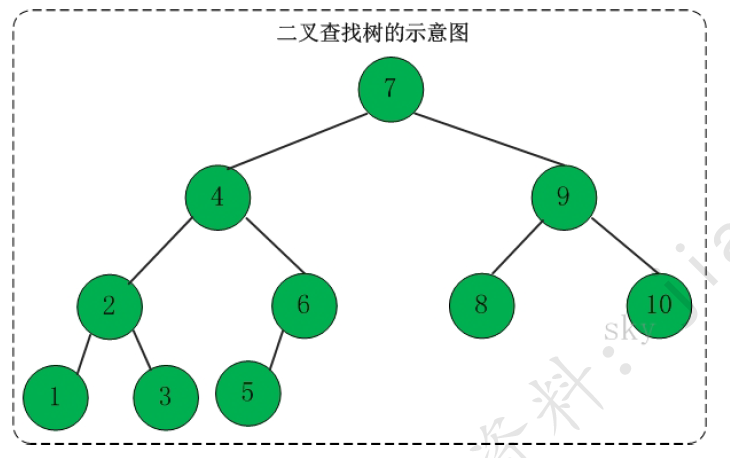
在二叉查找树中:
(01) 若任意节点的左子树不空,则左子树上所有结点的值均小于它的根结点的值;
(02) 任意节点的右子树不空,则右子树上所有结点的值均大于它的根结点的值; (03) 任意节点的左、右子树也分别为二叉查找树。 (04) 没有键值相等的节点(no duplicate nodes)。
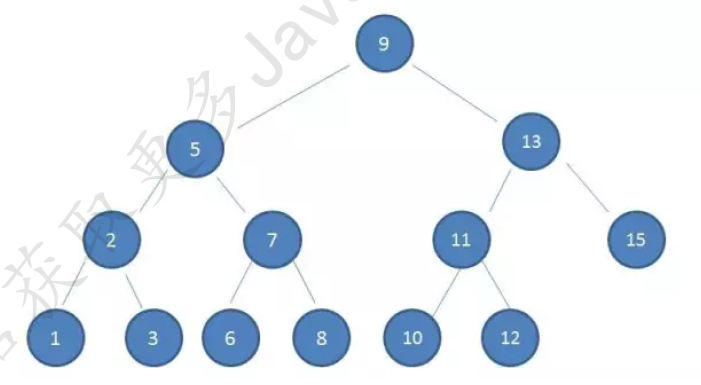
四、AVL树
AVL树是高度平衡的二叉搜索树,按照二叉搜索树(Binary Search Tree)的性质,AVL首先要满足:
- 若它的左子树不为空,则左子树上所有结点的值均小于它的根结点的值;
- 若它的右子树不为空,则右子树上所有结点的值均大于它的根结点的值;
- 它的左、右子树也分别为二叉搜索树。
AVL树的性质:
左子树和右子树的高度之差的绝对值不超过1树中的每个左子树和右子树都是AVL树每个节点都有一个平衡因子(balance factor--bf),任一节点的平衡因子是-1,0,1之一(每个节点的平衡因子bf 等于右子树的高度减去左子树的高度 ) 当插入或者删除节点之后,若AVL树的条件被破坏,则需要进行旋转操作来调整数据的结构以恢复AVL条件旋转至少涉及三层节点,所以至少要向上回溯一层 ,才会发现非法的平衡因子并进行旋转向上回溯校验时,需要进行旋转的几种情况:
1. 当前节点的父节点的平衡因子等于2时,说明父节点的右树比左树高:这时如果当前节点的平衡因子等于1,那么当前节点的右树比左树高,形如“ \ ”,需要进行左旋;如果当前节点的平衡因子等于-1,那么当前节点的右树比左树低,形如“ > ”,需要进行右左双旋!
2. 当前节点的父节点的平衡因子等于-2时,说明父节点的右树比左树低:这时如果当前节点的平衡因子等于-1,那么当前节点的右树比左树低,形如“ / ”,需要进行右旋;如果当前节点的平衡因子等于1,那么当前节点的右树比左树高,形如“ < ”,需要进行左右双旋!
五、红黑树
红黑树(Red Black Tree) 是一种自平衡二叉查找树,满足以下条件:
1. 节点是红色或黑色。
2. 根节点是黑色。
3. 每个叶子节点都是黑色的空节点(NIL节点)。
4. 每个红色节点的两个子节点都是黑色。(从每个叶子到根的所有路径上不能有两个连续的红色节点)
5. 从任一节点到其每个叶子的所有路径都包含相同数目的黑色节点。
这些特性使得红黑树中从根节点到叶子节点的最长路径不会超过最短路径的两倍
红黑树通过变色、左旋和右旋来保持平衡,任何不平衡都会在三次旋转之内解决
首先红黑树是不符合AVL树的平衡条件的,即每个节点的左子树和右子树的高度最多差1的二叉查找树。但是提出了为节点增加颜色,红黑是用非严格的平衡来换取增删节点时候旋转次数的降低,任何不平衡都会在三次旋转之内解决,而AVL是严格平衡树,因此在增加或者删除节点的时候,根据不同情况,旋转的次数比红黑树要多。所以红黑树的插入效率更高!!!
六、B-树
B-树就是B树,千万不要读B减树!!!!
从算法逻辑上来讲,二叉查找树的查找次数和比较次数都是最小的。但是,我们不得不考虑一个现实的问题:磁盘IO数据库索引是存储在磁盘上的,当数据量比较大的时候,索引的大小可能有几个G甚至更多
当我们利用索引查询的时候,能把整个索引文件全部加载到内存吗?显然不可能,能做的只有逐一加载每一个磁盘页,这里的磁盘页对应着索引树的节点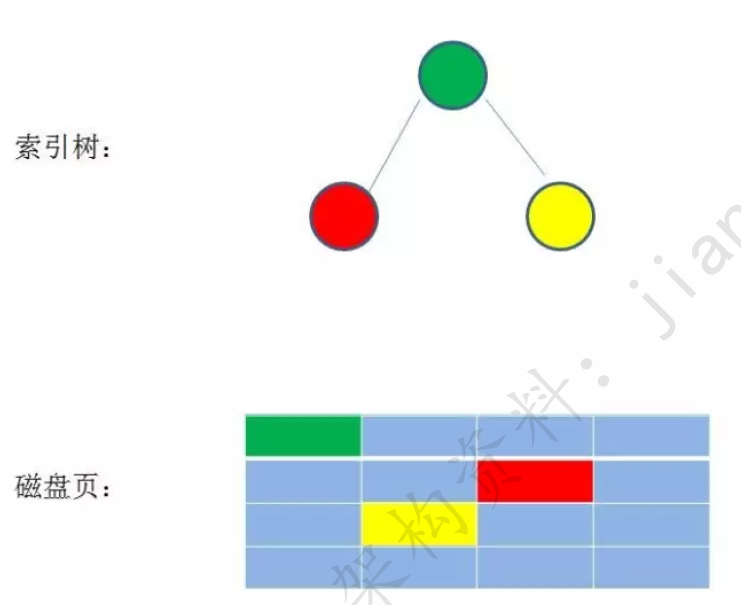
二叉查找树的结构:
第1次磁盘IO:
第2次磁盘IO:
第3次磁盘IO:
第4次磁盘IO:
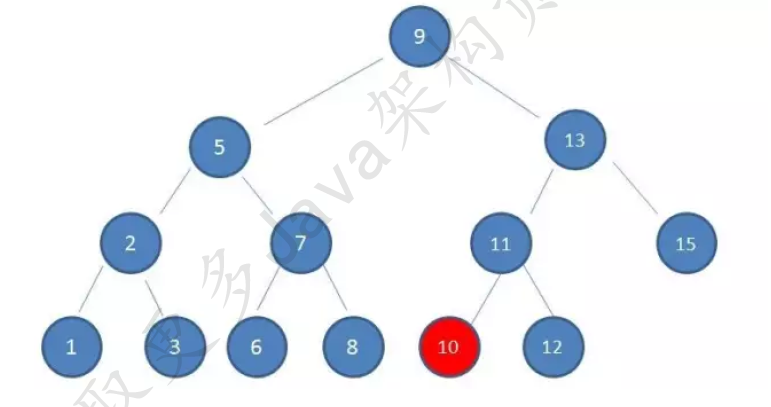
在使用二叉查找树查询过程中,我们发现在最坏的情况下,磁盘IO次数等于索引树的高度因此,为了减少磁盘IO次数,我们就需要把原本“瘦高”的树结构变得“矮胖”些。这就是B-树的特征之一B树是一种多路平衡查找树,它的每一个节点最多包含K个孩子,K被称为B树的阶,K的大小取决于磁盘页的大小
一个m阶的B树具有如下几个特征:
1. 根结点至少有两个子女。
2. 每个中间节点都包含k-1个元素和k个孩子,其中 m/2 <= k <= m
3. 每一个叶子节点都包含k-1个元素,其中 m/2 <= k <= m
4. 所有的叶子结点都位于同一层。
5. 每个节点中的元素从小到大排列,节点当中k-1个元素正好是k个孩子包含的元素的值域分划。
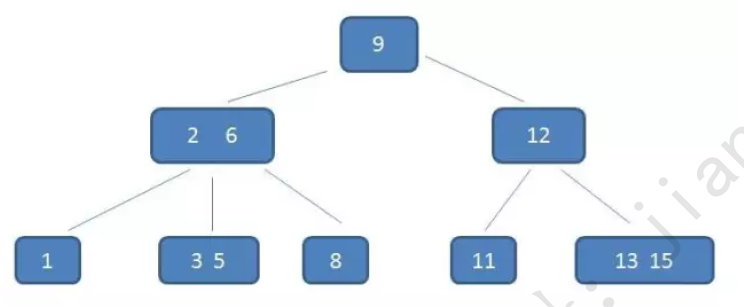
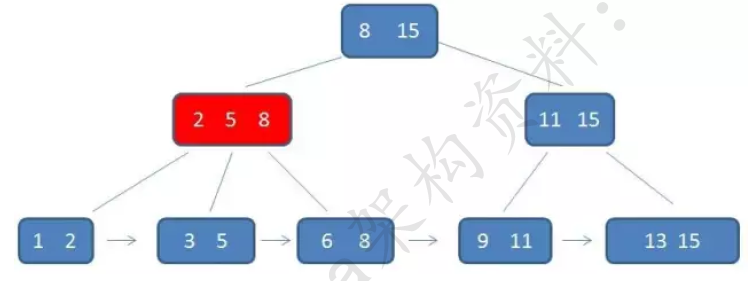
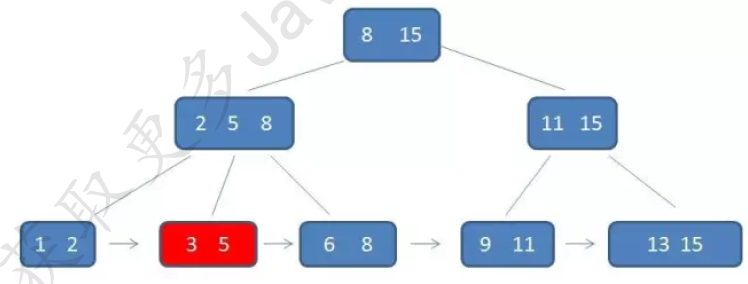
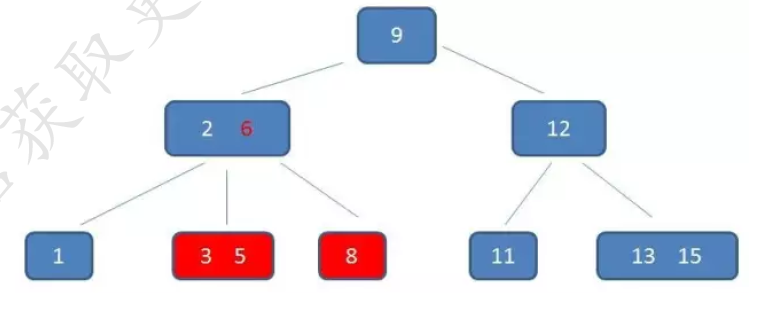
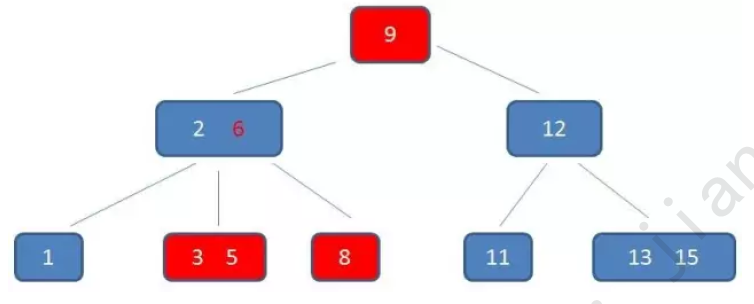
在这棵B树中,假设我们要查询的关键字为6,查询过程如下:
第1次磁盘IO:

在内存中定位(和9比较):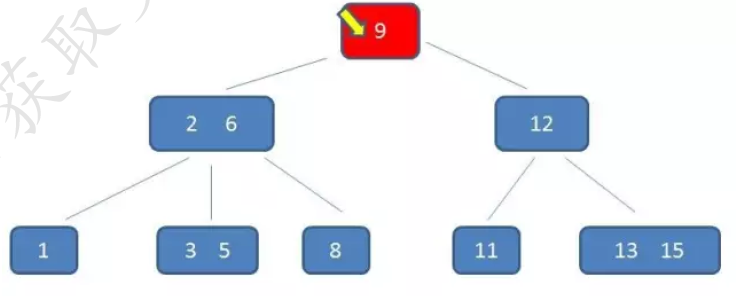
第2次磁盘IO:
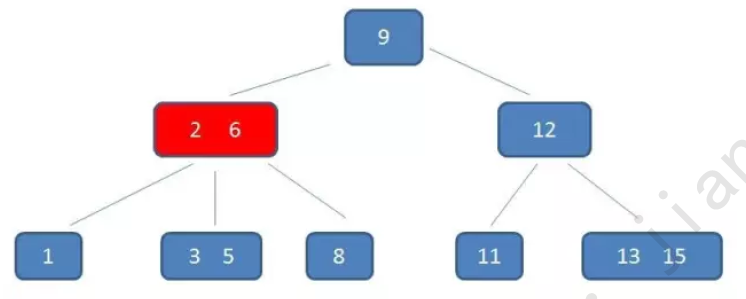
在内存中定位(和2,6比较):
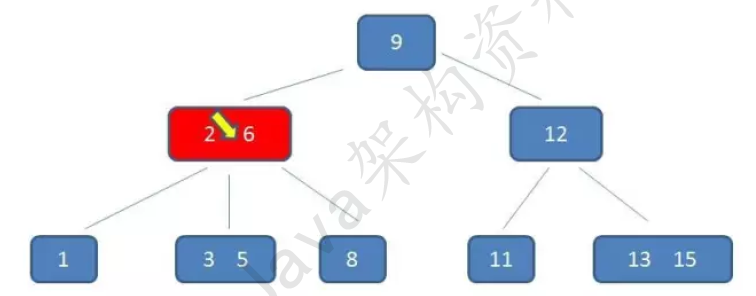
第3次磁盘IO:
在内存中定位(和3,5比较):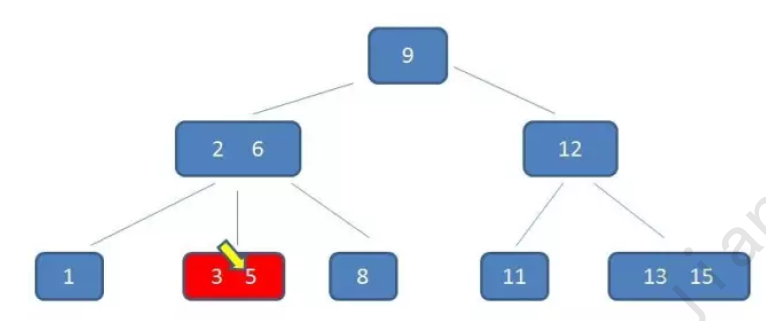
通过整个流程我们可以看出,B树在查询中的比较次数其实不比二叉查找树少,尤其是单一节点中元素的数量很多时可是相比磁盘IO的速度,内存中比较耗时几乎可以忽略。所以只要树的高度足够低,IO次数足够小,就可以提升查找性能相比之下节点内部元素多一些也没有关系,仅仅是多了几次内存交互,只要不超过磁盘页的大小即可。这就是B树的优势之一
B树的插入删除操作.......
七、B+树
B+树是基于B-树的一种变体,有着比B-树更高的查询性能
一个m阶的B+树具有如下几个特征:
1. 有k个子树的中间节点包含有k个元素(B树中是k-1个元素),每个元素不保存数据,只用来索引,所有数据都保存在叶子节点。
2. 所有的叶子结点中包含了全部元素的信息,及指向含这些元素记录的指针,且叶子结点本身依关键字的大小自小而大顺序链接。
3. 所有的中间节点元素都同时存在于子节点,在子节点元素中是最大(或最小)元素。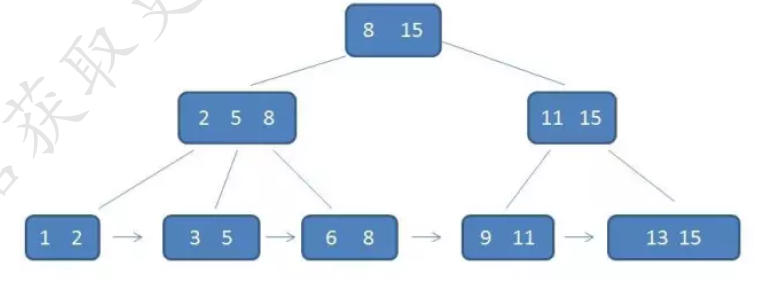
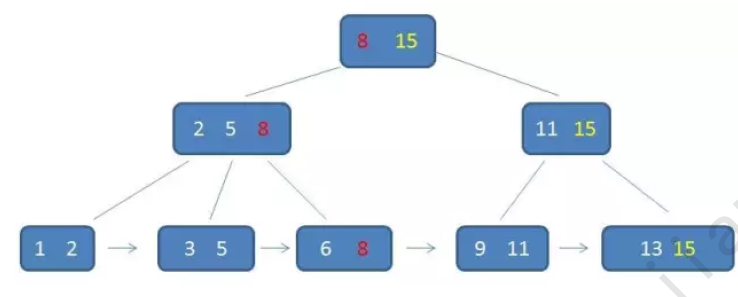
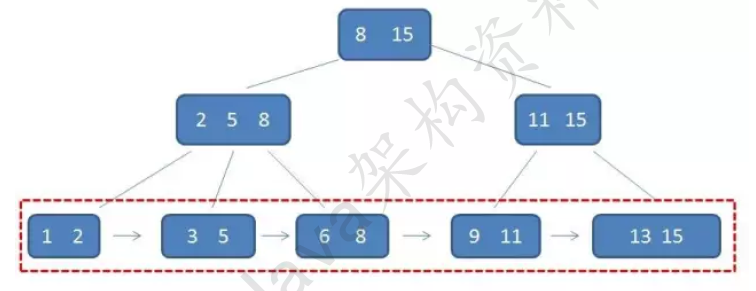
由于父节点的元素都出现在子节点中,因此所有的叶子节点包含了全量元素信息,并且每一个叶子节点都带有指向下一个节点的指针,形成了一个有序链表
B+树还具有一个特点,这个特点是在索引之外,确是至关重要的特点,那就是【卫星数据】所谓卫星数据,指的是索引元素所指向的数据记录,比如数据库中的某一行。在B-树种,无论中间节点还是叶子节点都带有卫星数据
B-树中的卫星数据(Satellite Information):
而在B+树中,只有叶子节点带有卫星数据,其余中间节点仅仅是索引,没有人任何数据关联
B+树中的卫星数据(Satellite Information):
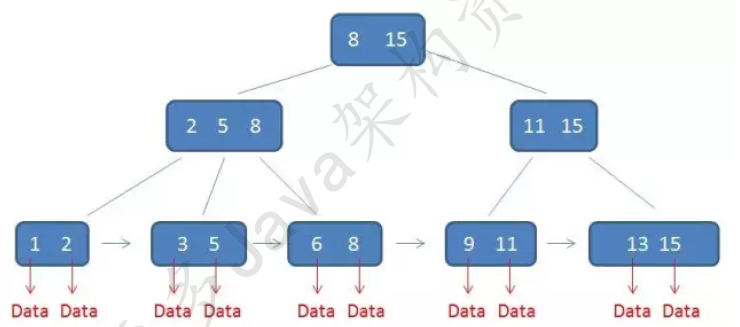
需要补充的是,在数据库的聚集索引(Clustered Index)中,叶子节点直接包含卫星数据。在非聚集索引(NonClustered Index)中,叶子节点带有指向卫星数据的指针。
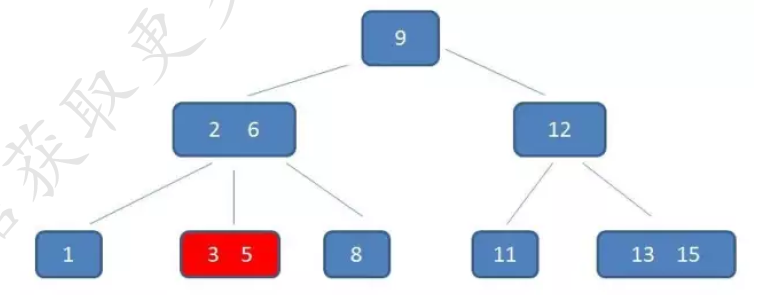
在B+树种查找元素3,流程如下:
第一次磁盘IO: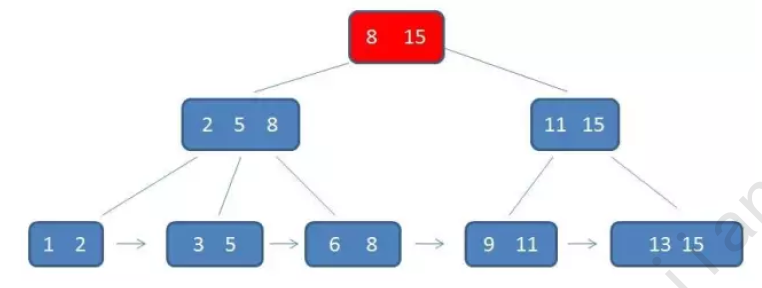
第二次磁盘IO:
第三次磁盘IO:
与B-树不同的是,B+树中间节点没有卫星数据,所以同样大小的磁盘页可以容纳更多的节点元素,这意味着,数据量相同的情况下,B+树的结构比B-树更加”矮胖“,因此查询时IO次数也更少其次,B+树的查询必须最终查找到叶子节点,而B-树只要找到匹配元素即可,无论匹配元素处于中间节点还是叶子
节点因此,B-树的查找性能并不稳定,最好的情况下直查根节点,最坏的情况下查找到叶子节点,而B+树的每一次查找都是稳定的
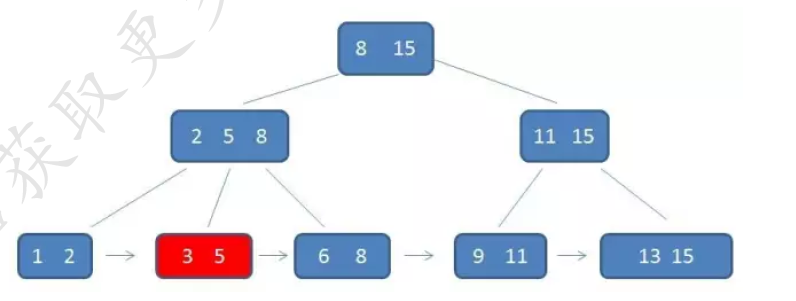
B+树比B-树更适合做范围查询:
B-树的范围查找过程
自顶向下,查找到范围的下限(3):
中序遍历到元素6:
中序遍历到元素8:
中序遍历到元素9:
中序遍历到元素11,遍历结束:

B+树的范围查找过程
自顶向下,查找到范围的下限(3):
通过链表指针,遍历到元素6, 8:
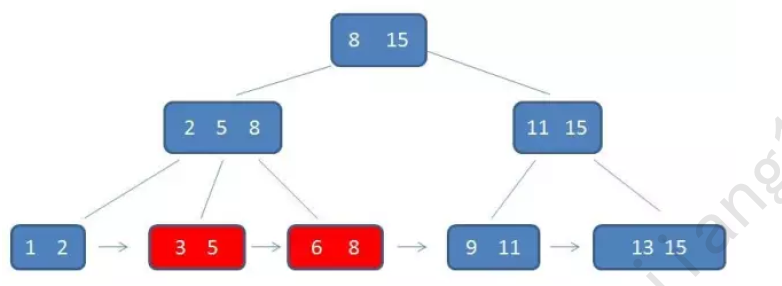
通过链表指针,遍历到元素9, 11,遍历结束:

B+树的优势:
1. 单一节点存储更多的元素,使得查询的IO次数更少。
2. 所有查询都要查找到叶子节点,查询性能稳定。
3. 所有叶子节点形成有序链表,便于范围查询。
八、字典树
字典树
又称单词查找树,Trie树,是一种树形结构,是一种哈希树的变形。典型应用是用于统计,排序和保存大量的字符串,所以经常被搜索引擎系统用于文本词频统计。它的优点是利用最大公共前缀来减少查询时间,最大限度地减少无谓的字符串比较,查询效率比哈希表高。
性质
- 根节点不包含字符,除根节点以外的每一个节点都只包含一个字符;
- 从根节点到某一节点,路径上经过的字符串连接起来,为该节点对应的字符串;
- 每个节点的所有子节点包含的字符都不相同。
实现方法
搜索字典项目的方法:
- 从根节点开始一次搜索;
- 取得要查找关键词的第一个字母,并根据该字母选择对应的子树继续进行检索;
- 在相应的子树上,取得要查找关键词的第二个字母,并进一步选择对应的子树进行检索
- 迭代下去
- 在某个结点处,关键词的所在字母已被取出,则读取附在该结点上的信息,即完成查找。
应用
(1)串的快速检索
给出N个单词组成的熟词表,以及一篇全用小写英文书写的文章,请你按最早出现的顺序写出所有不在熟词表中的生词。
方法1:可以将英文文章中的所有单词逐个与熟词表进行比较,O(N)=O(navg(length1)Navg(length2)) = O(nN)
方法2:采用hash表,
方法3:采用字典树,将该熟词表构成字典树,然后通过字典树进行查找。建树的时间复杂度:O(n) = O(N),查找的时间复杂度,只和树的深度相关,而与熟词表中有多少个单词无关,树的深度又与单词的长度有关,而单词最长不过30个字符,因此O(N)=O(1);另外在空间复杂度上又优于其他的算法, 由于公共前缀的存在,不需要大量存储重复的字符。
(2)串的排序
给定N个互不相同的仅由一个单词构成的英文名,让你将他们按字典序从小到大输出。用字典树进行排序,采用数组的方式创建字典树,因为树的每个结点的所有子结点很显然是按照其字母大小排序的,那么对待这棵树进行先序遍历即可。
(3)最长公共前缀
对所有串建立字典树
九、跳表
为什么选择跳表
目前经常使用的平衡数据结构有:B树,红黑树,AVL树,Splay Tree, Treep等。
想象一下,给你一张草稿纸,一只笔,一个编辑器,你能立即实现一颗红黑树,或者AVL树出来吗? 很难吧,这需要时间,要考虑很多细节,要参考一堆算法与数据结构之类的树,还要参考网上的代码,相当麻烦。
用跳表吧,跳表是一种随机化的数据结构,目前开源软件 Redis 和 LevelDB 都有用到它,它的效率和红黑树以及
AVL 树不相上下,但跳表的原理相当简单,只要你能熟练操作链表,就能轻松实现一个 SkipList。
有序表的搜索
考虑一个有序表:

从该有序表中搜索元素 < 23, 43, 59 > ,需要比较的次数分别为 < 2, 4, 6 >,总共比较的次数
为 2 + 4 + 6 = 12 次。有没有优化的算法吗? 链表是有序的,但不能使用二分查找。类似二叉
加微信获取更多Java架构资料:jiang10086
微信获取更多Java架构资料:jiang10086
搜索树,我们把一些节点提取出来,作为索引。得到如下结构:

这里我们把 < 14, 34, 50, 72 > 提取出来作为一级索引,这样搜索的时候就可以减少比较次数了。
我们还可以再从一级索引提取一些元素出来,作为二级索引,变成如下结构:
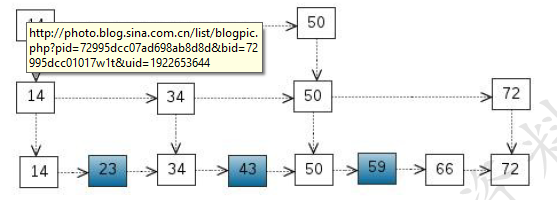
这里元素不多,体现不出优势,如果元素足够多,这种索引结构就能体现出优势来了。
这基本上就是跳表的核心思想,其实也是一种通过“空间来换取时间”的一个算法,通过在每个节点中增加了向前的
指针,从而提升查找的效率。
跳表
下面的结构是就是跳表:
其中 -1 表示 INT_MIN, 链表的最小值,1 表示 INT_MAX,链表的最大值。
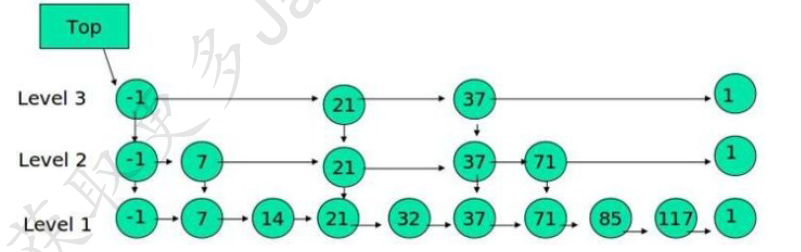
跳表具有如下性质:
(1) 由很多层结构组成
(2) 每一层都是一个有序的链表
(3) 最底层(Level 1)的链表包含所有元素
(4) 如果一个元素出现在 Level i 的链表中,则它在 Level i 之下的链表也都会出现。
(5) 每个节点包含两个指针,一个指向同一链表中的下一个元素,一个指向下面一层的元素。
跳表的搜索

例子:查找元素 117
(1) 比较 21, 比 21 大,往后面找
(2) 比较 37, 比 37大,比链表最大值小,从 37 的下面一层开始找
(3) 比较 71, 比 71 大,比链表最大值小,从 71 的下面一层开始找
(4) 比较 85, 比 85 大,从后面找
(5) 比较 117, 等于 117, 找到了节点。
具体的搜索算法如下:
跳表的插入
先确定该元素要占据的层数 K(采用丢硬币的方式,这完全是随机的)
然后在 Level 1 ... Level K 各个层的链表都插入元素。
例子:插入 119, K = 2
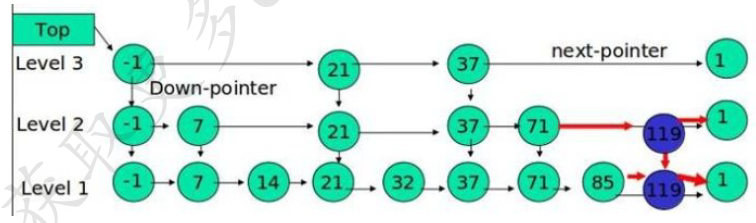
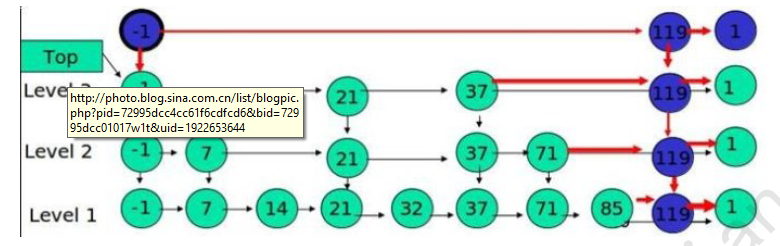
如果 K 大于链表的层数,则要添加新的层。
例子:插入 119, K = 4
丢硬币决定 K
插入元素的时候,元素所占有的层数完全是随机的,通过随机算法产生:
相当与做一次丢硬币的实验,如果遇到正面,继续丢,遇到反面,则停止,
用实验中丢硬币的次数 K 作为元素占有的层数。显然随机变量 K 满足参数为 p = 1/2 的几何分布,
K 的期望值 E[K] = 1/p = 2. 就是说,各个元素的层数,期望值是 2 层。
跳表的高度。
n 个元素的跳表,每个元素插入的时候都要做一次实验,用来决定元素占据的层数 K,
跳表的高度等于这 n 次实验中产生的最大 K,待续。。。
跳表的空间复杂度分析
根据上面的分析,每个元素的期望高度为 2, 一个大小为 n 的跳表,其节点数目的
期望值是 2n。
跳表的删除
在各个层中找到包含 x 的节点,使用标准的 delete from list 方法删除该节点。
例子:删除 71

十、HashMap
简介
Java为数据结构中的映射定义了一个接口java.util.Map,此接口主要有四个常用的实现类,分别是HashMap、
Hashtable、LinkedHashMap和TreeMap,类继承关系如下图所示: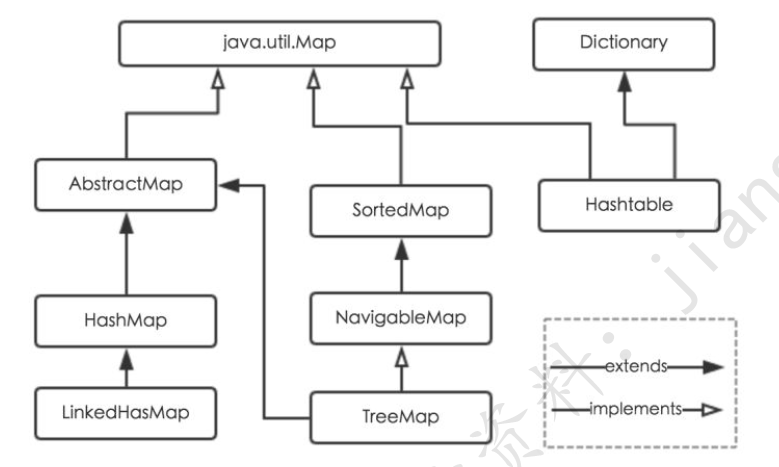
下面针对各个实现类的特点做一些说明:
(1) HashMap:它根据键的hashCode值存储数据,大多数情况下可以直接定位到它的值,因而具有很快的访问速
度,但遍历顺序却是不确定的。 HashMap最多只允许一条记录的键为null,允许多条记录的值为null。HashMap
非线程安全,即任一时刻可以有多个线程同时写HashMap,可能会导致数据的不一致。如果需要满足线程安全,
可以用 Collections的synchronizedMap方法使HashMap具有线程安全的能力,或者使用ConcurrentHashMap。
(2) Hashtable:Hashtable是遗留类,很多映射的常用功能与HashMap类似,不同的是它承自Dictionary类,并且
是线程安全的,任一时间只有一个线程能写Hashtable,并发性不如ConcurrentHashMap,因为
ConcurrentHashMap引入了分段锁。Hashtable不建议在新代码中使用,不需要线程安全的场合可以用HashMap
替换,需要线程安全的场合可以用ConcurrentHashMap替换。
(3) LinkedHashMap:LinkedHashMap是HashMap的一个子类,保存了记录的插入顺序,在用Iterator遍历
LinkedHashMap时,先得到的记录肯定是先插入的,也可以在构造时带参数,按照访问次序排序。
(4) TreeMap:TreeMap实现SortedMap接口,能够把它保存的记录根据键排序,默认是按键值的升序排序,也可
以指定排序的比较器,当用Iterator遍历TreeMap时,得到的记录是排过序的。如果使用排序的映射,建议使用
TreeMap。在使用TreeMap时,key必须实现Comparable接口或者在构造TreeMap传入自定义的Comparator,否
则会在运行时抛出java.lang.ClassCastException类型的异常。
对于上述四种Map类型的类,要求映射中的key是不可变对象。不可变对象是该对象在创建后它的哈希值不会被改
变。如果对象的哈希值发生变化,Map对象很可能就定位不到映射的位置了。
通过上面的比较,我们知道了HashMap是Java的Map家族中一个普通成员,鉴于它可以满足大多数场景的使用条
件,所以是使用频度最高的一个。下文我们主要结合源码,从存储结构、常用方法分析、扩容以及安全性等方面深
入讲解HashMap的工作原理。
内部实现
加微信获取更多Java架构资料:jiang10086
微信获取更多Java架构资料:jiang10086
搞清楚HashMap,首先需要知道HashMap是什么,即它的存储结构-字段;其次弄明白它能干什么,即它的功能实
现-方法。下面我们针对这两个方面详细展开讲解。
存储结构-字段
从结构实现来讲,HashMap是数组+链表+红黑树(JDK1.8增加了红黑树部分)实现的,如下如所示。
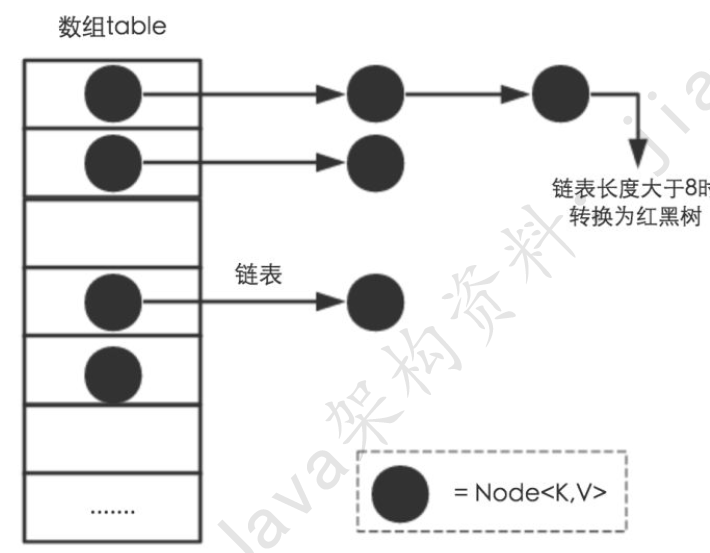
这里需要讲明白两个问题:数据底层具体存储的是什么?这样的存储方式有什么优点呢?
(1) 从源码可知,HashMap类中有一个非常重要的字段,就是 Node[] table,即哈希桶数组,明显它是一个Node
的数组。我们来看Node[JDK1.8]是何物。
static class Node<K,V> implements Map.Entry<K,V> {
final int hash; //用来定位数组索引位置
final K key;
V value;
Node<K,V> next; //链表的下一个node
Node(int hash, K key, V value, Node<K,V> next) { ... }
public final K getKey(){ ... }
public final V getValue() { ... }
public final String toString() { ... }
public final int hashCode() { ... }
public final V setValue(V newValue) { ... }
public final boolean equals(Object o) { ... }
Node是HashMap的一个内部类,实现了Map.Entry接口,本质是就是一个映射(键值对)。上图中的每个黑色圆点
就是一个Node对象。
(2) HashMap就是使用哈希表来存储的。哈希表为解决冲突,可以采用开放地址法和链地址法等来解决问题,Java
中HashMap采用了链地址法。链地址法,简单来说,就是数组加链表的结合。在每个数组元素上都一个链表结
构,当数据被Hash后,得到数组下标,把数据放在对应下标元素的链表上。例如程序执行下面代码:
系统将调用"美团"这个key的hashCode()方法得到其hashCode 值(该方法适用于每个Java对象),然后再通过
Hash算法的后两步运算(高位运算和取模运算,下文有介绍)来定位该键值对的存储位置,有时两个key会定位到
相同的位置,表示发生了Hash碰撞。当然Hash算法计算结果越分散均匀,Hash碰撞的概率就越小,map的存取效
率就会越高。
如果哈希桶数组很大,即使较差的Hash算法也会比较分散,如果哈希桶数组数组很小,即使好的Hash算法也会出
现较多碰撞,所以就需要在空间成本和时间成本之间权衡,其实就是在根据实际情况确定哈希桶数组的大小,并在
此基础上设计好的hash算法减少Hash碰撞。那么通过什么方式来控制map使得Hash碰撞的概率又小,哈希桶数组
(Node[] table)占用空间又少呢?答案就是好的Hash算法和扩容机制。
在理解Hash和扩容流程之前,我们得先了解下HashMap的几个字段。从HashMap的默认构造函数源码可知,构
造函数就是对下面几个字段进行初始化,源码如下:
首先,Node[] table的初始化长度length(默认值是16),Load factor为负载因子(默认值是0.75),threshold是
HashMap所能容纳的最大数据量的Node(键值对)个数。threshold = length * Load factor。也就是说,在数组定
义好长度之后,负载因子越大,所能容纳的键值对个数越多。
结合负载因子的定义公式可知,threshold就是在此Load factor和length(数组长度)对应下允许的最大元素数目,
超过这个数目就重新resize(扩容),扩容后的HashMap容量是之前容量的两倍。默认的负载因子0.75是对空间和时
间效率的一个平衡选择,建议大家不要修改,除非在时间和空间比较特殊的情况下,如果内存空间很多而又对时间
效率要求很高,可以降低负载因子Load factor的值;相反,如果内存空间紧张而对时间效率要求不高,可以增加
负载因子loadFactor的值,这个值可以大于1。
size这个字段其实很好理解,就是HashMap中实际存在的键值对数量。注意和table的长度length、容纳最大键值
对数量threshold的区别。而modCount字段主要用来记录HashMap内部结构发生变化的次数,主要用于迭代的快
速失败。强调一点,内部结构发生变化指的是结构发生变化,例如put新键值对,但是某个key对应的value值被覆
盖不属于结构变化。
在HashMap中,哈希桶数组table的长度length大小必须为2的n次方(一定是合数),这是一种非常规的设计,常规
的设计是把桶的大小设计为素数。相对来说素数导致冲突的概率要小于合数,具体证明可以参考
http://blog.csdn.net/liuqiyao_01/article/details/14475159,Hashtable初始化桶大小为11,就是桶大小设计为素
数的应用(Hashtable扩容后不能保证还是素数)。HashMap采用这种非常规设计,主要是为了在取模和扩容时做
优化,同时为了减少冲突,HashMap定位哈希桶索引位置时,也加入了高位参与运算的过程。
}
map.put("美团","小美");
int threshold; // 所能容纳的key-value对极限
final float loadFactor; // 负载因子
int modCount;
int size;
加微信获取更多Java架构资料:jiang10086
微信获取更多Java架构资料:jiang10086
这里存在一个问题,即使负载因子和Hash算法设计的再合理,也免不了会出现拉链过长的情况,一旦出现拉链过
长,则会严重影响HashMap的性能。于是,在JDK1.8版本中,对数据结构做了进一步的优化,引入了红黑树。而
当链表长度太长(默认超过8)时,链表就转换为红黑树,利用红黑树快速增删改查的特点提高HashMap的性能,
其中会用到红黑树的插入、删除、查找等算法。本文不再对红黑树展开讨论,想了解更多红黑树数据结构的工作原
理可以参考http://blog.csdn.net/v_july_v/article/details/6105630。
功能实现-方法
HashMap的内部功能实现很多,本文主要从根据key获取哈希桶数组索引位置、put方法的详细执行、扩容过程三
个具有代表性的点深入展开讲解。
1. 确定哈希桶数组索引位置
不管增加、删除、查找键值对,定位到哈希桶数组的位置都是很关键的第一步。前面说过HashMap的数据结构是
数组和链表的结合,所以我们当然希望这个HashMap里面的元素位置尽量分布均匀些,尽量使得每个位置上的元
素数量只有一个,那么当我们用hash算法求得这个位置的时候,马上就可以知道对应位置的元素就是我们要的,不
用遍历链表,大大优化了查询的效率。HashMap定位数组索引位置,直接决定了hash方法的离散性能。先看看源
码的实现(方法一+方法二):
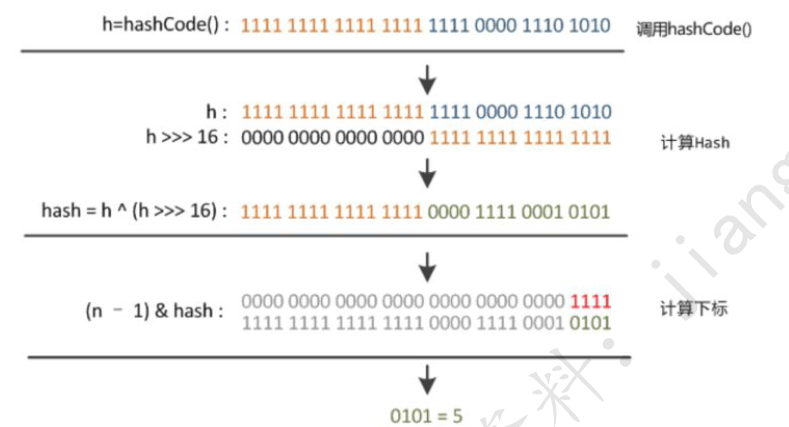
这里的Hash算法本质上就是三步:取key的hashCode值、高位运算、取模运算。
对于任意给定的对象,只要它的hashCode()返回值相同,那么程序调用方法一所计算得到的Hash码值总是相同
的。我们首先想到的就是把hash值对数组长度取模运算,这样一来,元素的分布相对来说是比较均匀的。但是,模
运算的消耗还是比较大的,在HashMap中是这样做的:调用方法二来计算该对象应该保存在table数组的哪个索引
处。
这个方法非常巧妙,它通过h & (table.length -1)来得到该对象的保存位,而HashMap底层数组的长度总是2的n次
方,这是HashMap在速度上的优化。当length总是2的n次方时,h& (length-1)运算等价于对length取模,也就是
h%length,但是&比%具有更高的效率。
在JDK1.8的实现中,优化了高位运算的算法,通过hashCode()的高16位异或低16位实现的:(h = k.hashCode()) ^
(h >>> 16),主要是从速度、功效、质量来考虑的,这么做可以在数组table的length比较小的时候,也能保证考虑
到高低Bit都参与到Hash的计算中,同时不会有太大的开销。
下面举例说明下,n为table的长度。
方法一:
static final int hash(Object key) { //jdk1.8 & jdk1.7
int h;
// h = key.hashCode() 为第一步 取hashCode值
// h ^ (h >>> 16) 为第二步 高位参与运算
return (key == null) ? 0 : (h = key.hashCode()) ^ (h >>> 16);
}
方法二:
static int indexFor(int h, int length) { //jdk1.7的源码,jdk1.8没有这个方法,但是实现原理一样的
return h & (length-1); //第三步 取模运算
}
这里的Hash算法本质上就是三步:取key的hashCode值、高位运算、取模运算。
对于任意给定的对象,只要它的hashCode()返回值相同,那么程序调用方法一所计算得到的Hash码值总是相同
的。我们首先想到的就是把hash值对数组长度取模运算,这样一来,元素的分布相对来说是比较均匀的。但是,模
运算的消耗还是比较大的,在HashMap中是这样做的:调用方法二来计算该对象应该保存在table数组的哪个索引
处。
这个方法非常巧妙,它通过h & (table.length -1)来得到该对象的保存位,而HashMap底层数组的长度总是2的n次
方,这是HashMap在速度上的优化。当length总是2的n次方时,h& (length-1)运算等价于对length取模,也就是
h%length,但是&比%具有更高的效率。
在JDK1.8的实现中,优化了高位运算的算法,通过hashCode()的高16位异或低16位实现的:(h = k.hashCode()) ^
(h >>> 16),主要是从速度、功效、质量来考虑的,这么做可以在数组table的length比较小的时候,也能保证考虑
到高低Bit都参与到Hash的计算中,同时不会有太大的开销。
下面举例说明下,n为table的长度。
2. 分析HashMap的put方法
HashMap的put方法执行过程可以通过下图来理解,自己有兴趣可以去对比源码更清楚地研究学习。
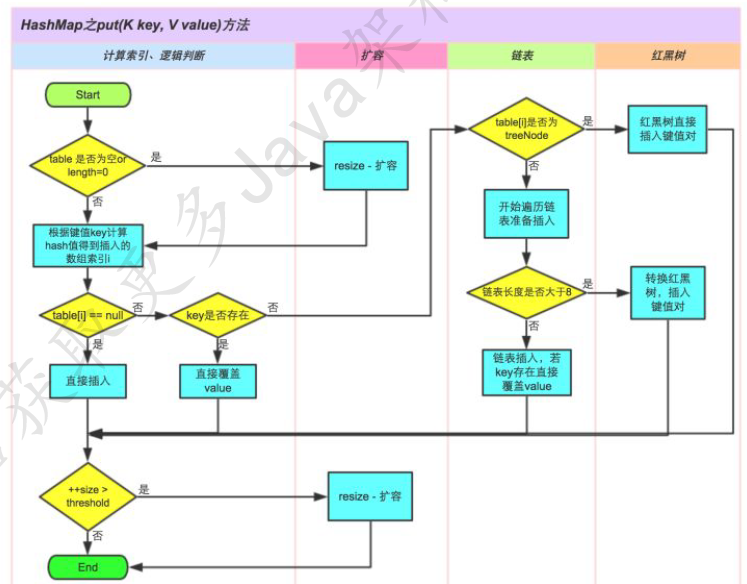
①.判断键值对数组table[i]是否为空或为null,否则执行resize()进行扩容;
②.根据键值key计算hash值得到插入的数组索引i,如果table[i]==null,直接新建节点添加,转向⑥,如果table[i]不为空,转向③;
③.判断table[i]的首个元素是否和key一样,如果相同直接覆盖value,否则转向④,这里的相同指的是hashCode以及equals;
④.判断table[i] 是否为treeNode,即table[i] 是否是红黑树,如果是红黑树,则直接在树中插入键值对,否则转向
⑤.遍历table[i],判断链表长度是否大于8,大于8的话把链表转换为红黑树,在红黑树中执行插入操作,否则进行链表的插入操作;遍历过程中若发现key已经存在直接覆盖value即可;
⑥.插入成功后,判断实际存在的键值对数量size是否超多了最大容量threshold,如果超过,进行扩容。
JDK1.8HashMap的put方法源码如下:
1 public V put(K key, V value) {
2 // 对key的hashCode()做hash
3 return putVal(hash(key), key, value, false, true);
4 }
5
6 final V putVal(int hash, K key, V value, boolean onlyIfAbsent,
7 boolean evict) {
8 Node<K,V>[] tab; Node<K,V> p; int n, i;
9 // 步骤①:tab为空则创建
10 if ((tab = table) == null || (n = tab.length) == 0)
11 n = (tab = resize()).length;
12 // 步骤②:计算index,并对null做处理
13 if ((p = tab[i = (n - 1) & hash]) == null)
14 tab[i] = newNode(hash, key, value, null);
15 else {
16 Node<K,V> e; K k;
17 // 步骤③:节点key存在,直接覆盖value
18 if (p.hash == hash &&
19 ((k = p.key) == key || (key != null && key.equals(k))))
20 e = p;
21 // 步骤④:判断该链为红黑树
22 else if (p instanceof TreeNode)
23 e = ((TreeNode<K,V>)p).putTreeVal(this, tab, hash, key, value);
24 // 步骤⑤:该链为链表
25 else {
26 for (int binCount = 0; ; ++binCount) {
27 if ((e = p.next) == null) {
28 p.next = newNode(hash, key,value,null);
//链表长度大于8转换为红黑树进行处理
29 if (binCount >= TREEIFY_THRESHOLD - 1) // -1 for 1st
30 treeifyBin(tab, hash);
31 break;
32 }
// key已经存在直接覆盖value
33 if (e.hash == hash &&
34 ((k = e.key) == key || (key != null && key.equals(k))))
加微信获取更多Java架构资料:jiang10086
微信获取更多Java架构资料:jiang10086
3. 扩容机制
扩容(resize)就是重新计算容量,向HashMap对象里不停的添加元素,而HashMap对象内部的数组无法装载更多的
元素时,对象就需要扩大数组的长度,以便能装入更多的元素。当然Java里的数组是无法自动扩容的,方法是使用
一个新的数组代替已有的容量小的数组,就像我们用一个小桶装水,如果想装更多的水,就得换大水桶。
我们分析下resize的源码,鉴于JDK1.8融入了红黑树,较复杂,为了便于理解我们仍然使用JDK1.7的代码,好理解
一些,本质上区别不大,具体区别后文再说。
这里就是使用一个容量更大的数组来代替已有的容量小的数组,transfer()方法将原有Entry数组的元素拷贝到新的
Entry数组里。
1 void transfer(Entry[] newTable) {
2 Entry[] src = table; //src引用了旧的Entry数组
3 int newCapacity = newTable.length;
break;
36 p = e;
37 }
38 }
39
40 if (e != null) { // existing mapping for key
41 V oldValue = e.value;
42 if (!onlyIfAbsent || oldValue == null)
43 e.value = value;
44 afterNodeAccess(e);
45 return oldValue;
46 }
47 }
48 ++modCount;
49 // 步骤⑥:超过最大容量 就扩容
50 if (++size > threshold)
51 resize();
52 afterNodeInsertion(evict);
53 return null;
54 }
1 void resize(int newCapacity) { //传入新的容量
2 Entry[] oldTable = table; //引用扩容前的Entry数组
3 int oldCapacity = oldTable.length;
4 if (oldCapacity == MAXIMUM_CAPACITY) { //扩容前的数组大小如果已经达到最大(2^30)了
5 threshold = Integer.MAX_VALUE; //修改阈值为int的最大值(2^31-1),这样以后就不会扩容了
6 return;
7 }
8
9 Entry[] newTable = new Entry[newCapacity]; //初始化一个新的Entry数组
10 transfer(newTable); //!!将数据转移到新的Entry数组里
11 table = newTable; //HashMap的table属性引用新的Entry数组
12 threshold = (int)(newCapacity * loadFactor);//修改阈值
13 }
加微信获取更多Java架构资料:jiang10086
微信获取更多Java架构资料:jiang10086
4 for (int j = 0; j < src.length; j++) { //遍历旧的Entry数组
5 Entry<K,V> e = src[j]; //取得旧Entry数组的每个元素
6 if (e != null) {
7 src[j] = null;//释放旧Entry数组的对象引用(for循环后,旧的Entry数组不再引用任何对象)
8 do {
9 Entry<K,V> next = e.next;
10 int i = indexFor(e.hash, newCapacity); //!!重新计算每个元素在数组中的位置
11 e.next = newTable[i]; //标记[1]
12 newTable[i] = e; //将元素放在数组上
13 e = next; //访问下一个Entry链上的元素
14 } while (e != null);
15 }
16 }
17 }
newTable[i]的引用赋给了e.next,也就是使用了单链表的头插入方式,同一位置上新元素总会被放在链表的头部位
置;这样先放在一个索引上的元素终会被放到Entry链的尾部(如果发生了hash冲突的话),这一点和Jdk1.8有区
别,下文详解。在旧数组中同一条Entry链上的元素,通过重新计算索引位置后,有可能被放到了新数组的不同位
置上。
下面举个例子说明下扩容过程。假设了我们的hash算法就是简单的用key mod 一下表的大小(也就是数组的长
度)。其中的哈希桶数组table的size=2, 所以key = 3、7、5,put顺序依次为 5、7、3。在mod 2以后都冲突在
table[1]这里了。这里假设负载因子 loadFactor=1,即当键值对的实际大小size 大于 table的实际大小时进行扩
容。接下来的三个步骤是哈希桶数组 resize成4,然后所有的Node重新rehash的过程。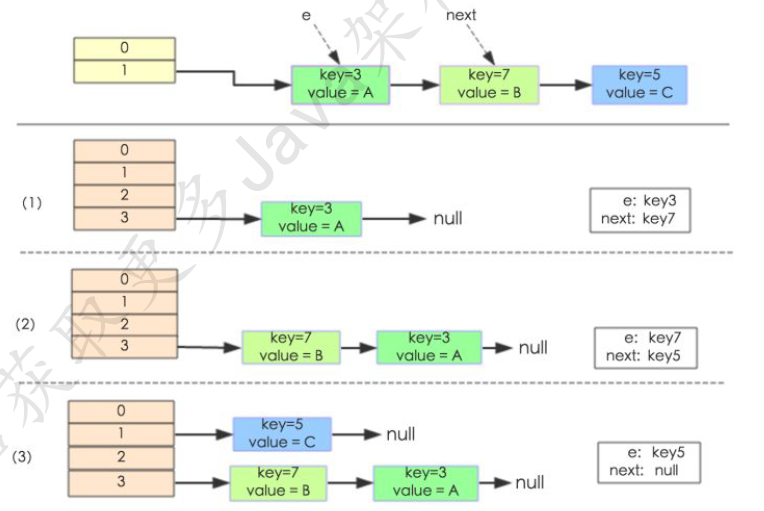
下面我们讲解下JDK1.8做了哪些优化。经过观测可以发现,我们使用的是2次幂的扩展(指长度扩为原来2倍),所
以,元素的位置要么是在原位置,要么是在原位置再移动2次幂的位置。看下图可以明白这句话的意思,n为table
的长度,图(a)表示扩容前的key1和key2两种key确定索引位置的示例,图(b)表示扩容后key1和key2两种key
确定索引位置的示例,其中hash1是key1对应的哈希与高位运算结果。

元素在重新计算hash之后,因为n变为2倍,那么n-1的mask范围在高位多1bit(红色),因此新的index就会发生这
样的变化:

因此,我们在扩充HashMap的时候,不需要像JDK1.7的实现那样重新计算hash,只需要看看原来的hash值新增的
那个bit是1还是0就好了,是0的话索引没变,是1的话索引变成“原索引+oldCap”,可以看看下图为16扩充为32的
resize示意图: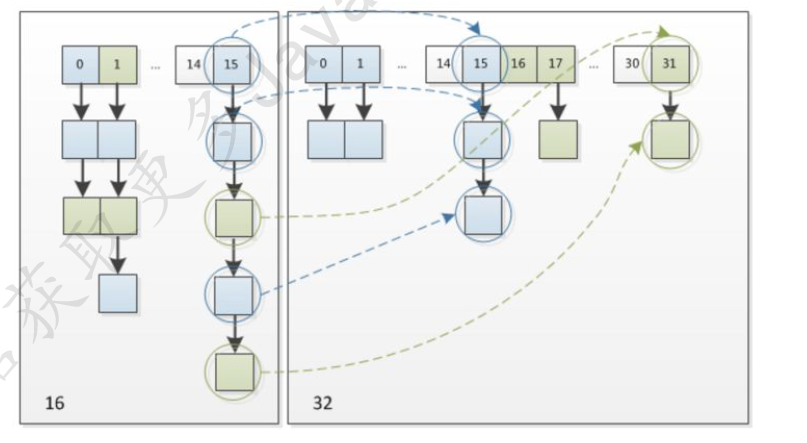
这个设计确实非常的巧妙,既省去了重新计算hash值的时间,而且同时,由于新增的1bit是0还是1可以认为是随机
的,因此resize的过程,均匀的把之前的冲突的节点分散到新的bucket了。这一块就是JDK1.8新增的优化点。有一
点注意区别,JDK1.7中rehash的时候,旧链表迁移新链表的时候,如果在新表的数组索引位置相同,则链表元素会
倒置,但是从上图可以看出,JDK1.8不会倒置。有兴趣的同学可以研究下JDK1.8的resize源码,写的很赞,如下:
1 final Node<K,V>[] resize() {
2 Node<K,V>[] oldTab = table;
3 int oldCap = (oldTab == null) ? 0 : oldTab.length;
4 int oldThr = threshold;
5 int newCap, newThr = 0;
6 if (oldCap > 0) {
7 // 超过最大值就不再扩充了,就只好随你碰撞去吧
8 if (oldCap >= MAXIMUM_CAPACITY) {
9 threshold = Integer.MAX_VALUE;
10 return oldTab;
11 }
12 // 没超过最大值,就扩充为原来的2倍
13 else if ((newCap = oldCap << 1) < MAXIMUM_CAPACITY &&
14 oldCap >= DEFAULT_INITIAL_CAPACITY)
15 newThr = oldThr << 1; // double threshold
16 }
17 else if (oldThr > 0) // initial capacity was placed in threshold
18 newCap = oldThr;
19 else { // zero initial threshold signifies using defaults
20 newCap = DEFAULT_INITIAL_CAPACITY;
21 newThr = (int)(DEFAULT_LOAD_FACTOR * DEFAULT_INITIAL_CAPACITY);
22 }
23 // 计算新的resize上限
24 if (newThr == 0) {
25
26 float ft = (float)newCap * loadFactor;
27 newThr = (newCap < MAXIMUM_CAPACITY && ft < (float)MAXIMUM_CAPACITY ?
28 (int)ft : Integer.MAX_VALUE);
29 }
30 threshold = newThr;
31 @SuppressWarnings({"rawtypes","unchecked"})
32 Node<K,V>[] newTab = (Node<K,V>[])new Node[newCap];
33 table = newTab;
34 if (oldTab != null) {
35 // 把每个bucket都移动到新的buckets中
36 for (int j = 0; j < oldCap; ++j) {
37 Node<K,V> e;
38 if ((e = oldTab[j]) != null) {
39 oldTab[j] = null;
40 if (e.next == null)
41 newTab[e.hash & (newCap - 1)] = e;
42 else if (e instanceof TreeNode)
43 ((TreeNode<K,V>)e).split(this, newTab, j, oldCap);
44 else { // 链表优化重hash的代码块
45 Node<K,V> loHead = null, loTail = null;
46 Node<K,V> hiHead = null, hiTail = null;
47 Node<K,V> next;
48 do {
49 next = e.next;
50 // 原索引
51 if ((e.hash & oldCap) == 0) {
52 if (loTail == null)
53 loHead = e;
54 else
55 loTail.next = e;
56 loTail = e;
57 }
58 // 原索引+oldCap
59 else {
60 if (hiTail == null)
61 hiHead = e;
62 else
63 hiTail.next = e;
64 hiTail = e;
65 }
66 } while ((e = next) != null);
67 // 原索引放到bucket里
68 if (loTail != null) {
69 loTail.next = null;
70 newTab[j] = loHead;
71 }
72 // 原索引+oldCap放到bucket里
73 if (hiTail != null) {
74 hiTail.next = null;
75 newTab[j + oldCap] = hiHead;
76 }
77 }
78 }
79 }
80 }
81 return newTab;
82 }
线程安全性
在多线程使用场景中,应该尽量避免使用线程不安全的HashMap,而使用线程安全的ConcurrentHashMap。那么
为什么说HashMap是线程不安全的,下面举例子说明在并发的多线程使用场景中使用HashMap可能造成死循环。
代码例子如下(便于理解,仍然使用JDK1.7的环境):
public class HashMapInfiniteLoop {
private static HashMap<Integer,String> map = new HashMap<Integer,String>(2,0.75f);
public static void main(String[] args) {
map.put(5, "C");
new Thread("Thread1") {
public void run() {
map.put(7, "B");
System.out.println(map);
};
}.start();
new Thread("Thread2") {
public void run() {
map.put(3, "A);
System.out.println(map);
};
}.start();
}
}
其中,map初始化为一个长度为2的数组,loadFactor=0.75,threshold=2*0.75=1,也就是说当put第二个key的
时候,map就需要进行resize。
通过设置断点让线程1和线程2同时debug到transfer方法(3.3小节代码块)的首行。注意此时两个线程已经成功添加
数据。放开thread1的断点至transfer方法的“Entry next = e.next;” 这一行;然后放开线程2的的断点,让线程2进
行resize。结果如下图。

注意,Thread1的 e 指向了key(3),而next指向了key(7),其在线程二rehash后,指向了线程二重组后的链表。
线程一被调度回来执行,先是执行 newTalbe[i] = e, 然后是e = next,导致了e指向了key(7),而下一次循环的
next = e.next导致了next指向了key(3)。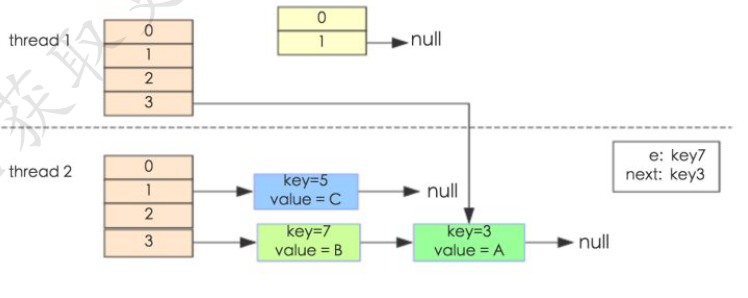
e.next = newTable[i] 导致 key(3).next 指向了 key(7)。注意:此时的key(7).next 已经指向了key(3), 环形链表就这
样出现了。
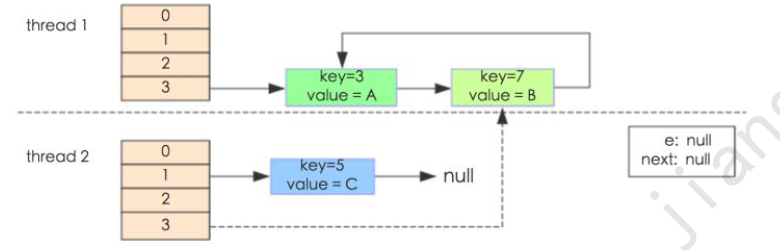
于是,当我们用线程一调用map.get(11)时,悲剧就出现了——Infinite Loop。
十一、ConcurrentHashMap
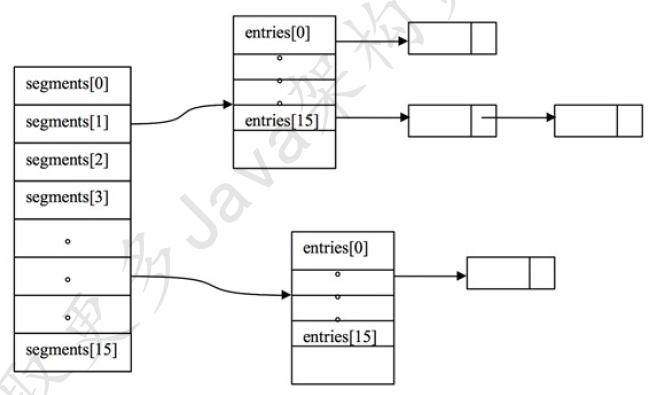
锁分段技术
CAS无锁算法
实现方式
CAS:Compare and Swap, 翻译成比较并交换。
java.util.concurrent包中借助CAS实现了区别于synchronouse同步锁的一种乐观锁。
CAS有3个操作数,内存值V,旧的预期值A,要修改的新值B。当且仅当预期值A和内存值V相同时,将内存值V修改
为B,否则什么都不做。
那么问题就来了,成功过程中需要2个步骤:比较this == expect,替换this = update,compareAndSwapInt如何
这两个步骤的原子性呢?
public final boolean compareAndSet(int expect, int update) {
return unsafe.compareAndSwapInt(this, valueOffset, expect, update);
}
整体的过程就是这样子的,利用CPU的CAS指令,同时借助JNI来完成Java的非阻塞算法。其它原子操作都是利用类似的
特性完成的。
其中
unsafe.compareAndSwapInt(this, valueOffset, expect, update);
类似:
if (this == expect) {
this = update
return true;
} else {
return false;
}
借助于字节码指令锁住缓存行或者锁住总线
存在的缺点
1. ABA问题。因为CAS需要在操作值的时候检查下值有没有发生变化,如果没有发生变化则更新,但是如果一个
值原来是A,变成了B,又变成了A,那么使用CAS进行检查时会发现它的值没有发生变化,但是实际上却变化
了。ABA问题的解决思路就是使用版本号。在变量前面追加上版本号,每次变量更新的时候把版本号加一,那
么A-B-A 就会变成1A-2B-3A。
从Java1.5开始JDK的atomic包里提供了一个类AtomicStampedReference来解决ABA问题。这个类的
compareAndSet方法作用是首先检查当前引用是否等于预期引用,并且当前标志是否等于预期标志,如果全部相
等,则以原子方式将该引用和该标志的值设置为给定的更新值。
关于ABA问题参考文档: http://blog.hesey.net/2011/09/resolve-aba-by-atomicstampedreference.html
2. 循环时间长开销大。自旋CAS如果长时间不成功,会给CPU带来非常大的执行开销。如果JVM能支持处理器提供
的pause指令那么效率会有一定的提升,pause指令有两个作用,第一它可以延迟流水线执行指令(de-pipeline),
使CPU不会消耗过多的执行资源,延迟的时间取决于具体实现的版本,在一些处理器上延迟时间是零。第二它可以
避免在退出循环的时候因内存顺序冲突(memory order violation)而引起CPU流水线被清空(CPU pipeline
flush),从而提高CPU的执行效率。
3. 只能保证一个共享变量的原子操作。当对一个共享变量执行操作时,我们可以使用循环CAS的方式来保证原子操
作,但是对多个共享变量操作时,循环CAS就无法保证操作的原子性,这个时候就可以用锁,或者有一个取巧的办
法,就是把多个共享变量合并成一个共享变量来操作。比如有两个共享变量i=2,j=a,合并一下ij=2a,然后用CAS
来操作ij。从Java1.5开始JDK提供了AtomicReference类来保证引用对象之间的原子性,你可以把多个变量放在一
个对象里来进行CAS操作。
十二、ConcurrentLinkedQueue
延迟更新tail节点
延迟删除head节点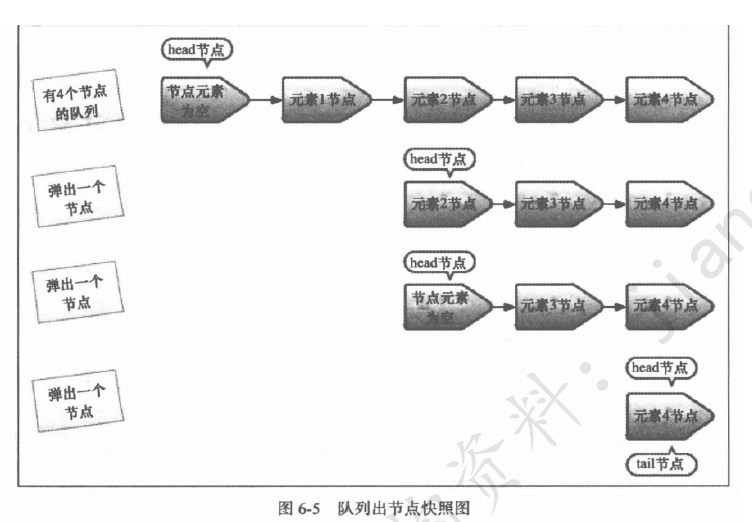
十三、Topk问题
简述
在大规模数据处理中,经常会遇到的一类问题:在海量数据中找出出现频率最好的前k个数,或者从海量数据中找
出最大的前k个数,这类问题通常被称为top K问题。例如,在搜索引擎中,统计搜索最热门的10个查询词;在歌曲
库中统计下载最高的前10首歌等。
针对top K类问题,通常比较好的方案是分治+Trie树/hash+小顶堆(就是上面提到的最小堆),即先将数据集按照
Hash方法分解成多个小数据集,然后使用Trie树活着Hash统计每个小数据集中的query词频,之后用小顶堆求出每
个数据集中出现频率最高的前K个数,最后在所有top K中求出最终的top K。
eg:有1亿个浮点数,如果找出期中最大的10000个?
解决方案
最容易想到的方法是将数据全部排序,然后在排序后的集合中进行查找,最快的排序算法的时间复杂度一般为
O(nlogn),如快速排序。但是在32位的机器上,每个float类型占4个字节,1亿个浮点数就要占用400MB的存储
空间,对于一些可用内存小于400M的计算机而言,很显然是不能一次将全部数据读入内存进行排序的。其实即使
内存能够满足要求(我机器内存都是8GB),该方法也并不高效,因为题目的目的是寻找出最大的10000个数即
可,而排序却是将所有的元素都排序了,做了很多的无用功。
第二种方法为局部淘汰法,该方法与排序方法类似,用一个容器保存前10000个数,然后将剩余的所有数字——与
容器内的最小数字相比,如果所有后续的元素都比容器内的10000个数还小,那么容器内这个10000个数就是最大
10000个数。如果某一后续元素比容器内最小数字大,则删掉容器内最小元素,并将该元素插入容器,最后遍历完
这1亿个数,得到的结果容器中保存的数即为最终结果了。此时的时间复杂度为O(n+m^2),其中m为容器的大
小,即10000。
第三种方法是分治法,将1亿个数据分成100份,每份100万个数据,找到每份数据中最大的10000个,最后在剩下
的10010000个数据里面找出最大的10000个。如果100万数据选择足够理想,那么可以过滤掉1亿数据里面99%的
数据。100万个数据里面查找最大的10000个数据的方法如下:用快速排序的方法,将数据分为2堆,如果大的那堆
个数N大于10000个,继续对大堆快速排序一次分成2堆,如果大的那堆个数N大于10000个,继续对大堆快速排序
一次分成2堆,如果大堆个数N小于10000个,就在小的那堆里面快速排序一次,找第10000-n大的数字;递归以上
过程,就可以找到第1w大的数。参考上面的找出第1w大数字,就可以类似的方法找到前10000大数字了。此种方
法需要每次的内存空间为10^64=4MB,一共需要101次这样的比较。
第四种方法是Hash法。如果这1亿个书里面有很多重复的数,先通过Hash法,把这1亿个数字去重复,这样如果
重复率很高的话,会减少很大的内存用量,从而缩小运算空间,然后通过分治法或最小堆法查找最大的10000个
数。
第五种方法采用最小堆。首先读入前10000个数来创建大小为10000的最小堆,建堆的时间复杂度为O(mlogm)
(m为数组的大小即为10000),然后遍历后续的数字,并于堆顶(最小)数字进行比较。如果比最小的数小,则
继续读取后续数字;如果比堆顶数字大,则替换堆顶元素并重新调整堆为最小堆。整个过程直至1亿个数全部遍历
完为止。然后按照中序遍历的方式输出当前堆中的所有10000个数字。该算法的时间复杂度为O(nmlogm),空
间复杂度是10000(常数)。
实际运行
实际上,最优的解决方案应该是最符合实际设计需求的方案,在时间应用中,可能有足够大的内存,那么直接将数
据扔到内存中一次性处理即可,也可能机器有多个核,这样可以采用多线程处理整个数据集。
下面针对不容的应用场景,分析了适合相应应用场景的解决方案。
(1)单机+单核+足够大内存
如果需要查找10亿个查询次(每个占8B)中出现频率最高的10个,考虑到每个查询词占8B,则10亿个查询次所需
的内存大约是10^9 * 8B=8GB内存。如果有这么大内存,直接在内存中对查询次进行排序,顺序遍历找出10个出现
频率最大的即可。这种方法简单快速,使用。然后,也可以先用HashMap求出每个词出现的频率,然后求出频率
最大的10个词。
(2)单机+多核+足够大内存
这时可以直接在内存总使用Hash方法将数据划分成n个partition,每个partition交给一个线程处理,线程的处理
逻辑同(1)类似,最后一个线程将结果归并。
该方法存在一个瓶颈会明显影响效率,即数据倾斜。每个线程的处理速度可能不同,快的线程需要等待慢的线程,
最终的处理速度取决于慢的线程。而针对此问题,解决的方法是,将数据划分成c×n个partition(c>1),每个线
程处理完当前partition后主动取下一个partition继续处理,知道所有数据处理完毕,最后由一个线程进行归并。
(3)单机+单核+受限内存
这种情况下,需要将原数据文件切割成一个一个小文件,如次啊用hash(x)%M,将原文件中的数据切割成M小文
件,如果小文件仍大于内存大小,继续采用Hash的方法对数据文件进行分割,知道每个小文件小于内存大小,这
样每个文件可放到内存中处理。采用(1)的方法依次处理每个小文件。
(4)多机+受限内存
这种情况,为了合理利用多台机器的资源,可将数据分发到多台机器上,每台机器采用(3)中的策略解决本地的
数据。可采用hash+socket方法进行数据分发。
从实际应用的角度考虑,(1)(2)(3)(4)方案并不可行,因为在大规模数据处理环境下,作业效率并不是
首要考虑的问题,算法的扩展性和容错性才是首要考虑的。算法应该具有良好的扩展性,以便数据量进一步加大
(随着业务的发展,数据量加大是必然的)时,在不修改算法框架的前提下,可达到近似的线性比;算法应该具有
容错性,即当前某个文件处理失败后,能自动将其交给另外一个线程继续处理,而不是从头开始处理。 top K问题
很适合采用MapReduce框架解决,用户只需编写一个Map函数和两个Reduce 函数,然后提交到Hadoop(采用
Mapchain和Reducechain)上即可解决该问题。具体而言,就是首先根据数据值或者把数据hash(MD5)后的值按
照范围划分到不同的机器上,最好可以让数据划分后一次读入内存,这样不同的机器负责处理不同的数值范围,实
际上就是Map。得到结果后,各个机器只需拿出各自出现次数最多的前N个数据,然后汇总,选出所有的数据中出
现次数最多的前N个数据,这实际上就是Reduce过程。对于Map函数,采用Hash算法,将Hash值相同的数据交给
同一个Reduce task;对于第一个Reduce函数,采用HashMap统计出每个词出现的频率,对于第二个Reduce 函
数,统计所有Reduce task,输出数据中的top K即可。 直接将数据均分到不同的机器上进行处理是无法得到正确
的结果的。因为一个数据可能被均分到不同的机器上,而另一个则可能完全聚集到一个机器上,同时还可能存在具
有相同数目的数据。
经常被提及的该类问题
(1)有10000000个记录,这些查询串的重复度比较高,如果除去重复后,不超过3000000个。一个查询串的重复
度越高,说明查询它的用户越多,也就是越热门。请统计最热门的10个查询串,要求使用的内存不能超过1GB。
(2)有10个文件,每个文件1GB,每个文件的每一行存放的都是用户的query,每个文件的query都可能重复。按
照query的频度排序。 (3)有一个1GB大小的文件,里面的每一行是一个词,词的大小不超过16个字节,内存限
制大小是1MB。返回频数最高的100个词。 (4)提取某日访问网站次数最多的那个IP。 (5)10亿个整数找出重
复次数最多的100个整数。 (6)搜索的输入信息是一个字符串,统计300万条输入信息中最热门的前10条,每次
输入的一个字符串为不超过255B,内存使用只有1GB。 (7)有1000万个身份证号以及他们对应的数据,身份证
号可能重复,找出出现次数最多的身份证号。
重复问题
在海量数据中查找出重复出现的元素或者去除重复出现的元素也是常考的问题。针对此类问题,一般可以通过位图
法实现。例如,已知某个文件内包含一些电话号码,每个号码为8位数字,统计不同号码的个数。 本题最好的解决
方法是通过使用位图法来实现。8位整数可以表示的最大十进制数值为99999999。如果每个数字对应于位图中一个
bit位,那么存储8位整数大约需要99MB。因为1B=8bit,所以99Mbit折合成内存为99/8=12.375MB的内存,即可
以只用12.375MB的内存表示所有的8位数电话号码的内容。
十四、资源池思想
作用
1. 降低资源消耗
2. 提高响应速度
3. 增强可管理性
线程池
与任务单元自己执行任务不同,线程池将任务单元和执行机制相分离,线程池中的线程为执行机制,提交给线程池
的线程为任务单元,任务单元不自己执行任务,不创建线程,而是由线程池中的线程来执行任务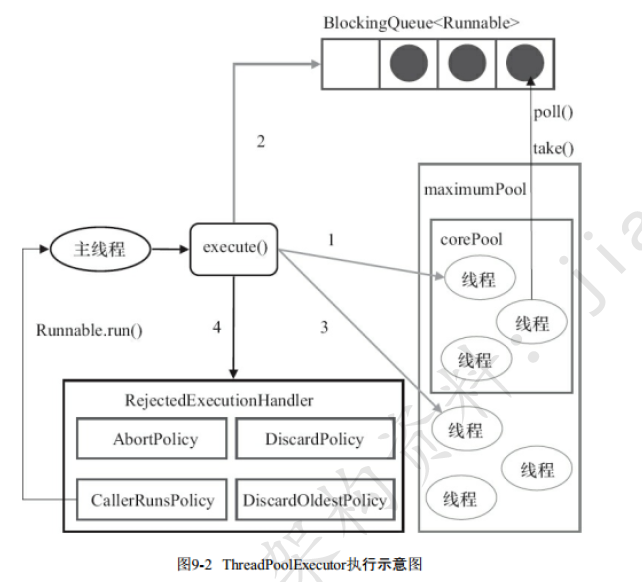
连接池
普通的JDBC数据库连接(Connectiond对象)使用 DriverManager 来获取,每次向数据库建立连接的时候都要将Connection 加载到内存中,再验证用户名和密码(得花费0.05s~1s的时间),数据库的连接是比较昂贵的(创建的成本比较大)。需要数据库连接的时候,就向数据库要求一个,执行完成后再断开连接这样的方式将会消耗大量的资源和时间。 数据库的连接资源并没有得到很好的重复利用.若同时有几百人甚至几千。人在线,频繁的进行数据库连接操作将占用很多的系统资源,严重的甚至会造成服务器的崩溃。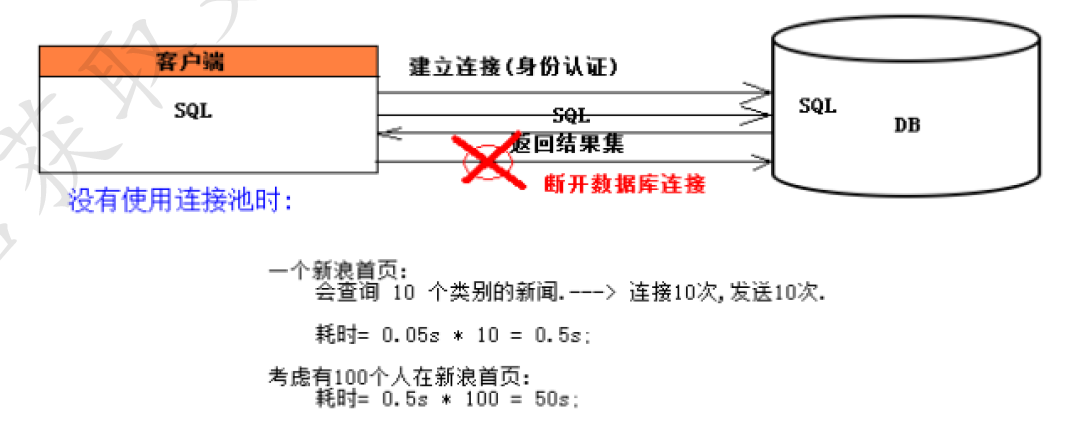

十五、JVM内存管理算法
判断对象是否存活
引用计数法
很多教科书判断对象是否存活的算法是这样昨给对象中添加一个引用计数器,每当有 一个地方引用它时,计数器值就加1:当引用失效时,计数器值就减1;任何时刻计数器为 0的对象就是不可能再被使用的。
客观地说,引用计数算法(Reference Counting)的实现简单,判定效率也很高,在大部分情况下它都是一个不错的算法.也有一些比较著名的应用案例,例如微软公司的COM(Component Object Model)技术、使用Action5cript3的FIashPlayer.Python语言和在游戏脚本领域被广泛应用的Squirzel中都使用了引用计数算法进行内在管。但是,至少主流的Java虚拟机里面没有选用引用计数算法来管理内存,其中最主要原因是它很难解决对象之间互循环引用的问题。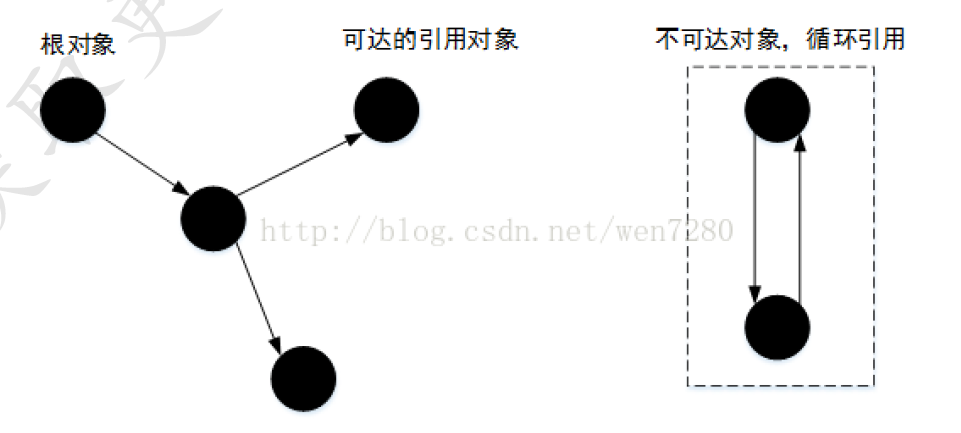
可达性分析算法
这个算法的基本思路就是通过一系列的称为“GC Roots”的对象作为起始点,从这些节点开始向下搜索,搜索所走过的路径称为引用链(Reference Chain),当一个对象到GC Roots没有任何引用链相连(用图论的话来说,就是从GC Roots到这个对象不可达)时,则证明此对象是不可用的。如下图所示,对象object 5、object 6、object 7虽然互相有关联,但是它们到GC Roots是不可达的,所以它们将会被判定为是可回收的对象。
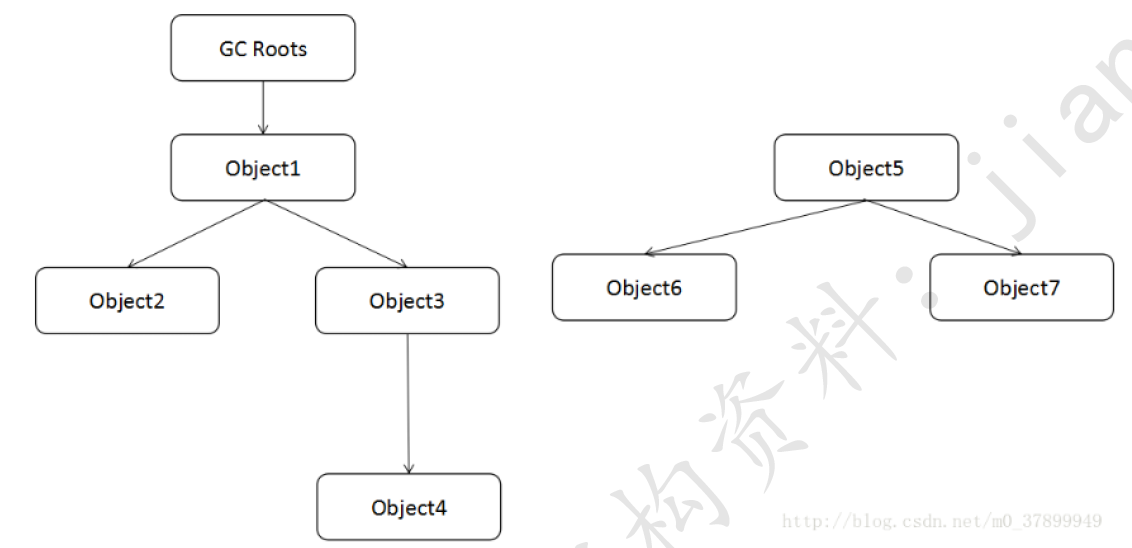
在java钟只有以下的对象才可以被作为GC Root.
1>虚拟机栈(栈帧中的本地方法表)中引用的对象。
2>方法区中类静态属性引用的对象。
3>方法区中常量引用的对象。
4>本地方法栈JNI(即一般说的Native方法)的引用对象。
垃圾回收算法
JVM规范中并没有明确GC的运作方式,各个厂商可以采用不同的方式去实现垃圾回收器。这里讨论几种常见的GC
算法。
标记-清除算法(Mark-Sweep)
最基础的垃圾回收算法,分为两个阶段,标注和清除。标记阶段标记出所有需要回收的对象,清除阶段回收被标记的对象所占用的空间。如图:
从图中我们就可以发现,该算法最大的问题是内存碎片化严重,后续可能发生大对象不能找到可利用空间的问题。
复制算法(Copying)
为了解决Mark-Sweep算法内存碎片化的缺陷而被提出的算法。按内存容量将内存划分为等大小的两块。每次只使用其中一块,当这一块内存满后将尚存活的对象复制到另一块上去,把已使用的内存清掉,如图: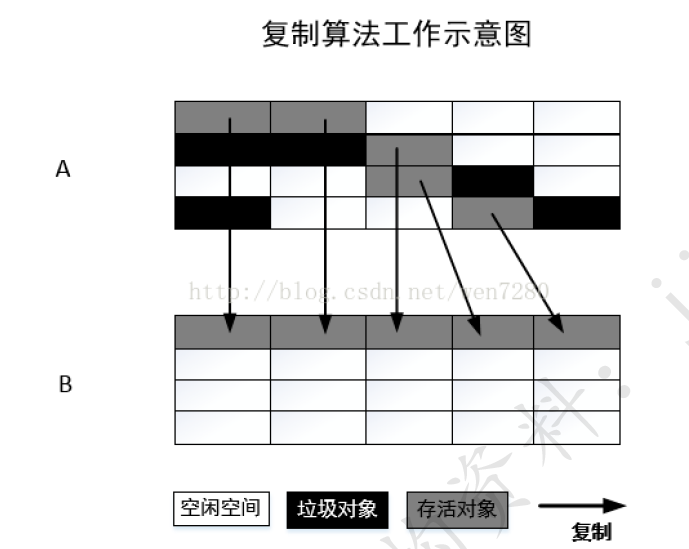
这种算法虽然实现简单,内存效率高,不易产生碎片,但是最大的问题是可用内存被压缩到了原本的一半。且存活对象增多的话,Copying算法的效率会大大降低。
标记-整理算法(Mark-Compact)
结合了以上两个算法,为了避免缺陷而提出。标记阶段和Mark-Sweep算法相同,标记后不是清理对象,而是将存活对象移向内存的一端。然后清除端边界外的对象。如图: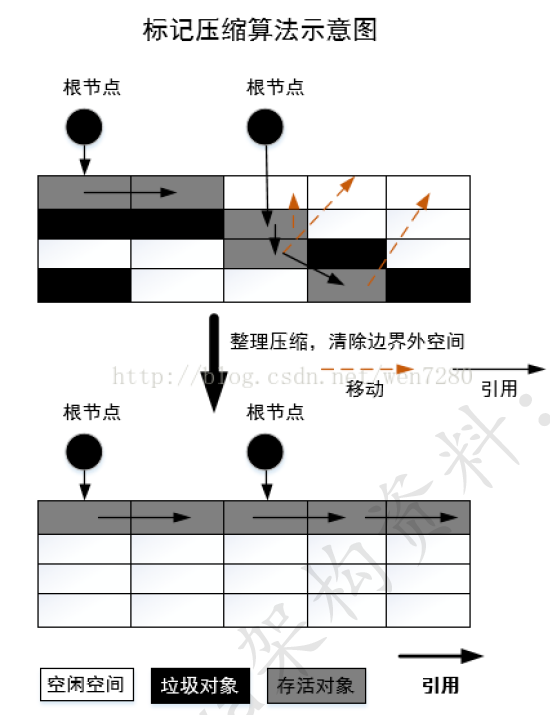
分代收集算法(Generational Collection)
分代收集法是目前大部分JVM所采用的方法,其核心思想是根据对象存活的不同生命周期将内存划分为不同的域,一般情况下将GC堆划分为老生代(Tenured/Old Generation)和新生代(Young Generation)。老生代的特点是每次垃圾回收时只有少量对象需要被回收,新生代的特点是每次垃圾回收时都有大量垃圾需要被回收,因此可以根据不同区域选择不同的算法。目前大部分JVM的GC对于新生代都采取Copying算法,因为新生代中每次垃圾回收都要回收大部分对象,即要复制的操作比较少,但通常并不是按照1:1来划分新生代。一般将新生代划分为一块较大的Eden空间和两个较小的Survivor空间(From Space, To Space),每次使用Eden空间和其中的一块Survivor空间,当进行回收时,将该两块空间中还存活的对象复制到另一块Survivor空间中。
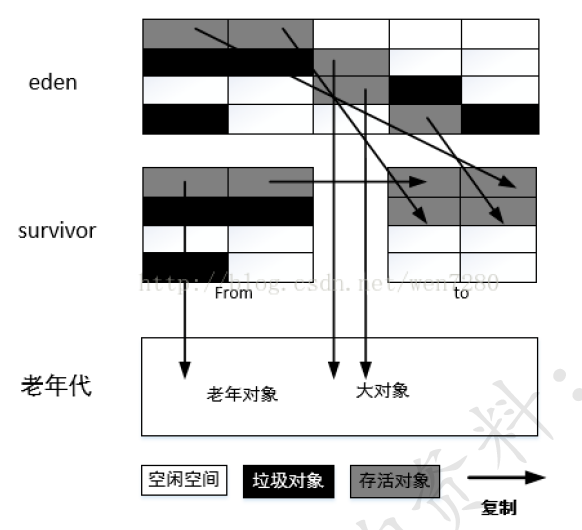
而老生代因为每次只回收少量对象,因而采用Mark-Compact算法。
另外,不要忘记在Java基础:Java虚拟机(JVM)中提到过的处于方法区的永生代(Permanet Generation)。它用来存储class类,常量,方法描述等。对永生代的回收主要包括废弃常量和无用的类。对象的内存分配主要在新生代的Eden Space和Survivor Space的From Space(Survivor目前存放对象的那一块),少数情况会直接分配到老生代。当新生代的Eden Space和From Space空间不足时就会发生一次GC,进行GC后,Eden Space和From Space区的存活对象会被挪到To Space,然后将Eden Space和From Space进行清理。如果ToSpace无法足够存储某个对象,则将这个对象存储到老生代。在进行GC后,使用的便是Eden Space和To Space了,如此反复循环。当对象在Survivor区躲过一次GC后,其年龄就会+1。默认情况下年龄到达15的对象会被移到老生代中。
十六、容器虚拟化技术,Doocker思想
为什么会有docker
一款产品从开发到上线,从操作系统,到运行环境,再到应用配置。作为开发+运维之间的协作我们需要关心很多东西,这也是很多互联网公司都不得不面对的问题,特别是各种版本的迭代之后,不同版本环境的兼容,对运维人员都是考验 Docker之所以发展如此迅速,也是因为它对此给出了一个标准化的解决方案。 环境配置如此麻烦,换一台机器,就要重来一次,费力费时。很多人想到,能不能从根本上解决问题,软件可以带环境安装?也就是说,安装的时候,把原始环境一模一样地复制过来。开发人员利用 Docker 可以消除协作编码时“在我的机器上可正常工作”的问题。之前在服务器配置一个应用的运行环境,要安装各种软件,就拿尚硅谷电商项目的环境来说吧,Java/Tomcat/MySQL/JDBC驱动包等。安装和配置这些东西有多麻烦就不说了,它还不能跨平台。假如我们是在Windows 上安装的这些环境,到了 Linux 又得重新装。况且就算不跨操作系统,换另一台同样操作系统的服务器,要移植应用也是非常麻烦的。
传统上认为,软件编码开发/测试结束后,所产出的成果即是程序或是能够编译执行的二进制字节码等(java为例)。而为了让这些程序可以顺利执行,开发团队也得准备完整的部署文件,让维运团队得以部署应用程式,开发需要清楚的告诉运维部署团队,用的全部配置文件+所有软件环境。不过,即便如此,仍然常常发生部署失败的状况。Docker镜像的设计,使得Docker得以打破过去「程序即应用」的观念。透过镜像(images)将作业系统核心除外,运作应用程式所需要的系统环境,由下而上打包,达到应用程式跨平台间的无缝接轨运作。
docker理念
Docker是基于Go语言实现的云开源项目。 Docker的主要目标是“Build,Ship and Run Any App,Anywhere”,也就是通过对应用组件的封装、分发、部署、运行等生命周期的管理,使用户的APP(可以是一个WEB应用或数据库应用等等)及其运行环境能够做到“一次封装,到处运行”。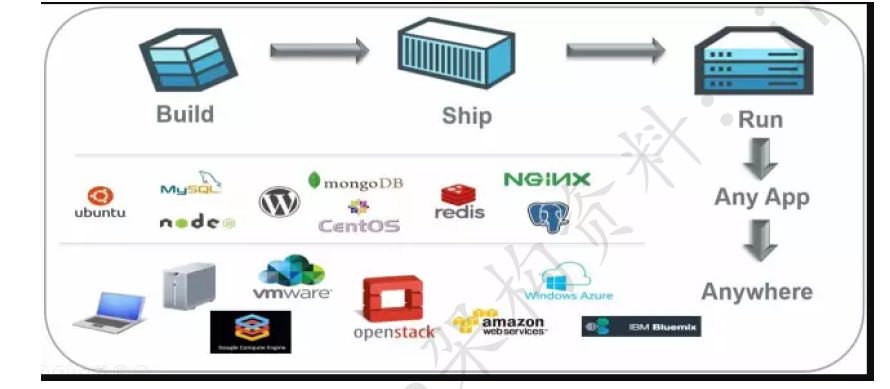
Linux 容器技术的出现就解决了这样一个问题,而 Docker 就是在它的基础上发展过来的。将应用运行在 Docker容器上面,而 Docker 容器在任何操作系统上都是一致的,这就实现了跨平台、跨服务器。只需要一次配置好环境,换到别的机子上就可以一键部署好,大大简化了操作
实现方式
虚拟机(virtual machine)就是带环境安装的一种解决方案。 它可以在一种操作系统里面运行另一种操作系统,比如在Windows 系统里面运行Linux 系统。应用程序对此毫无感知,因为虚拟机看上去跟真实系统一模一样,而对于底层系统来说,虚拟机就是一个普通文件,不需要了就删掉,对其他部分毫无影响。这类虚拟机完美的运行了另一套系统,能够使应用程序,操作系统和硬件三者之间的逻辑不变。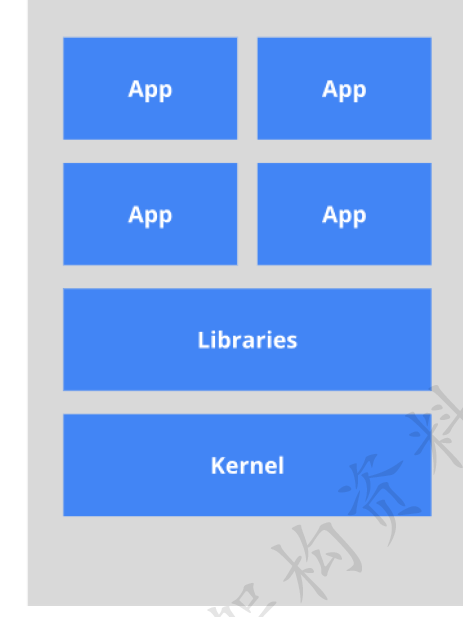
虚拟机的缺点: 1 资源占用多 2 冗余步骤多 3 启动慢
由于前面虚拟机存在这些缺点,Linux 发展出了另一种虚拟化技术:Linux 容器(Linux Containers,缩写为LXC)。 Linux 容器不是模拟一个完整的操作系统,而是对进程进行隔离。有了容器,就可以将软件运行所需的所有资源打包到一个隔离的容器中。容器与虚拟机不同,不需要捆绑一整套操作系统,只需要软件工作所需的库资源和设置。系统因此而变得高效轻量并保证部署在任何环境中的软件都能始终如一地运行。
比较了 Docker 和传统虚拟化方式的不同之处:
- 传统虚拟机技术是虚拟出一套硬件后,在其上运行一个完整操作系统,在该系统上再运行所需应用进程;
- 而容器内的应用进程直接运行于宿主的内核,容器内没有自己的内核,而且也没有进行硬件虚拟。因此容器要比传统虚拟机更为轻便。
- 每个容器之间互相隔离,每个容器有自己的文件系统 ,容器之间进程不会相互影响,能区分计算资源。
docker的组成
镜像
Docker 镜像(Image)就是一个只读的模板。镜像可以用来创建 Docker 容器,一个镜像可以创建很多容器。
容器
Docker 利用容器(Container)独立运行的一个或一组应用。容器是用镜像创建的运行实例。它可以被启动、开始、停止、删除。每个容器都是相互隔离的、保证安全的平台。可以把容器看做是一个简易版的 Linux 环境(包括root用户权限、进程空间、用户空间和网络空间等)和运行在其中的应用程序。
容器的定义和镜像几乎一模一样,也是一堆层的统一视角,唯一区别在于容器的最上面那一层是可读可写的。
仓库
仓库(Repository)是集中存放镜像文件的场所。 仓库(Repository)和仓库注册服务器(Registry)是有区别的。仓库注册服务器上往往存放着多个仓库,每个仓库中又包含了多个镜像,每个镜像有不同的标签(tag)。仓库分为公开仓库(Public)和私有仓库(Private)两种形式。 最大的公开仓库是 DockerHub(https://hub.docker.com/), 存放了数量庞大的镜像供用户下载。国内的公开仓库包括阿里云 、网易云 等
总结
需要正确的理解仓储/镜像/容器这几个概念:
Docker 本身是一个容器运行载体或称之为管理引擎。我们把应用程序和配置依赖打包好形成一个可交付的运行环境,这个打包好的运行环境就似乎 image镜像文件。只有通过这个镜像文件才能生成 Docker 容器。image 文件可以看作是容器的模板。Docker 根据 image 文件生成容器的实例。同一个 image 文件,可以生成多个同时运行的容器实例。
- image 文件生成的容器实例,本身也是一个文件,称为镜像文件。
- 一个容器运行一种服务,当我们需要的时候,就可以通过docker客户端创建一个对应的运行实例,也就是我们的容器
- 至于仓储,就是放了一堆镜像的地方,我们可以把镜像发布到仓储中,需要的时候从仓储中拉下来就可以了。
十七、持续集成、持续发布,jenkins
持续集成
好处 1: 降低风险 一天中进行多次的集成, 并做了相应的测试, 这样有利于检查缺陷, 了解软件的健康状况,减少假定。
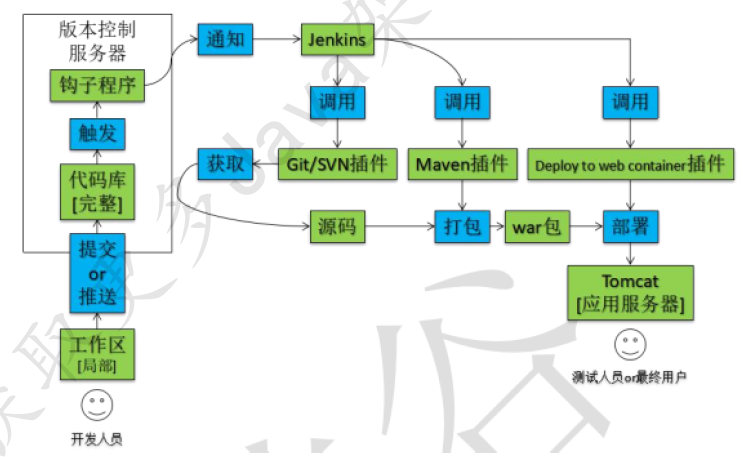
好处 2: 减少重复过程 产生重复过程有两个方面的原因, 一个是编译、 测试、 打包、 部署等等固定操作都必须要做, 无法省略任何一个环节; 另一个是一个缺陷如果没有及时发现, 有可能导致后续代码的开发方向是错误的,要修复问题需要重新编写受影响的所有代码。而使用 Jenkins 等持续集成工具既可以把构建环节从手动完成转换为自动化完成, 又可以通过增加集成频次尽早发现缺陷避免方向性错误。
好处 3: 任何时间、 任何地点生成可部署的软件 持续集成可以让您在任何时间发布可以部署的软件。 从外界来看, 这是持续集成最明显的好处, 我们可以对改进软件品质和减少风险说起来滔滔不绝, 但对于客户来说, 可以部署的软件产品是最实际的资产。 利用持续集成, 您可以经常对源代码进行一些小改动, 并将这些改动和其他的代码进行集成。 如果出现问题, 项目成员马上就会被通知到, 问题会第一时间被修复。 不采用持续集成的情况下, 这些问题有可能到交付前的集成测试的时候才发现, 有可能会导致延迟发布产品, 而在急于修复这些缺陷的时候又有可能引入新的缺陷, 最终可能导致项目失败。
好处 4: 增强项目的可见性 持续集成让我们能够注意到趋势并进行有效的决策。如果没有真实或最新的数据提供支持, 项目就会遇到麻烦, 每个人都会提出他最好的猜测。 通常, 项目成员通过手工收集这些信息, 增加了负担, 也很耗时。 持续集成可以带来两点积极效果: (1)有效决策: 持续集成系统为项目构建状态和品质指标提供了及时的信息,有些持续集成系统可以报告功能完成度和缺陷率。 (2)注意到趋势: 由于经常集成, 我们可以看到一些趋势, 如构建成功或失败、总体品质以及其它的项目信息。
好处 5: 建立团队对开发产品的信心 持续集成可以建立开发团队对开发产品的信心,因为他们清楚的知道每一次构建的结果, 他们知道他们对软件的改动造成了哪些影响, 结果怎么样。
手动部署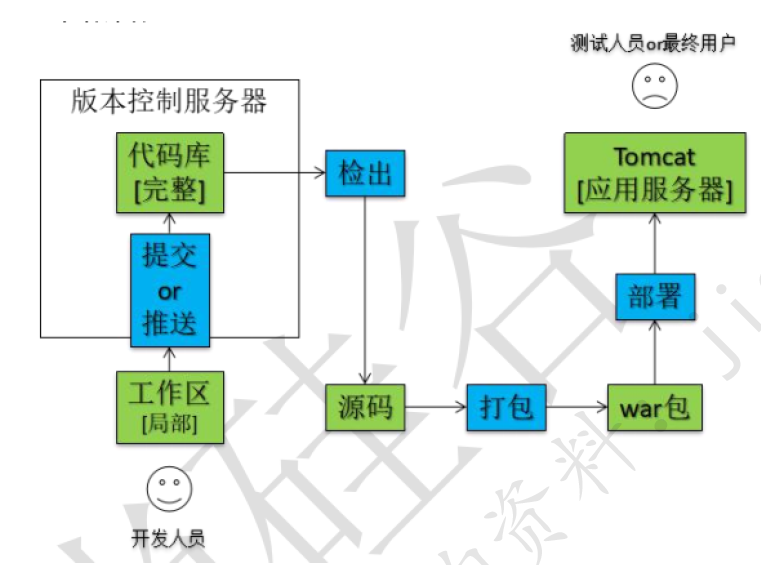
自动部署

 浙公网安备 33010602011771号
浙公网安备 33010602011771号