搜索与图论【复习】
负权正权都可用SPFA, 正权被卡用堆优化Dijkstra
正权用堆优化Dijkstra
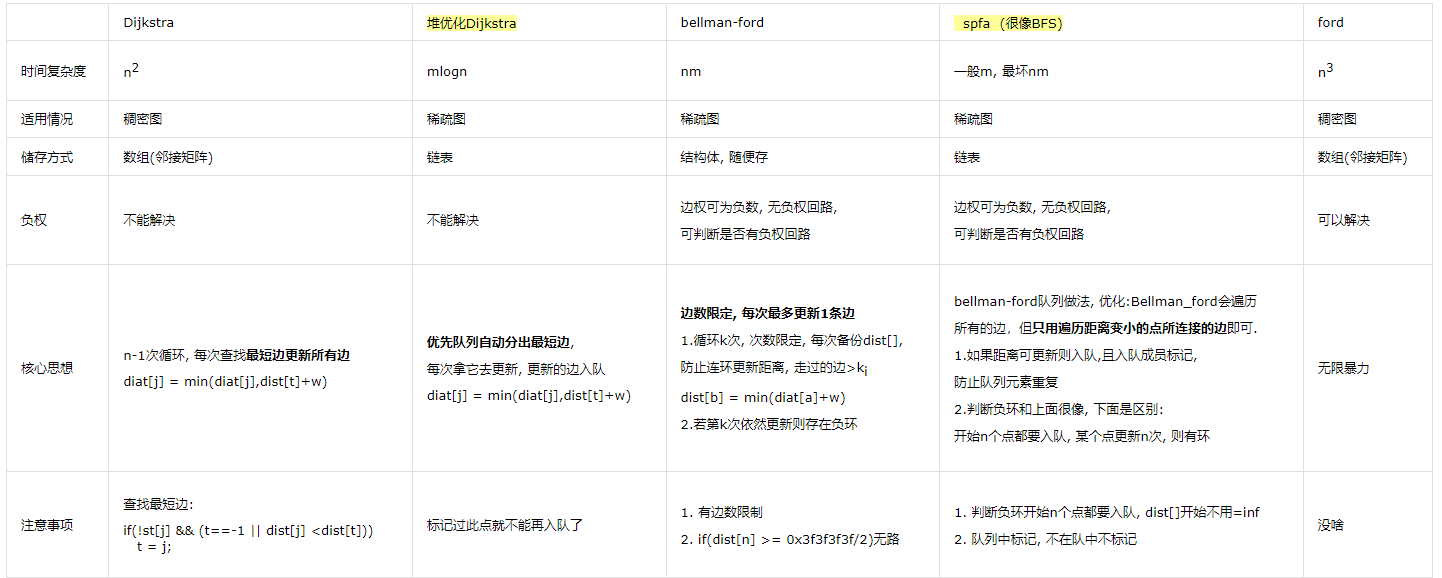
| Dijkstra | 堆优化Dijkstra | bellman-ford | spfa (很像BFS) | ford | |
| 时间复杂度 | n2 | mlogn | nm |
一般m, 最坏nm |
n3 |
| 适用情况 | 稠密图 | 稀疏图 | 稀疏图 | 稀疏图 | 稠密图 |
| 储存方式 | 数组(邻接矩阵) | 链表 | 结构体, 随便存 | 链表 | 数组(邻接矩阵) |
| 负权 | 不能解决 | 不能解决 |
边权可为负数, 无负权回路, 可判断是否有负权回路 |
边权可为负数, 无负权回路, 可判断是否有负权回路 |
可以解决 |
| 核心思想 |
n-1次循环, 每次查找最短边更新所有边 diat[j] = min(diat[j],dist[t]+w) |
优先队列自动分出最短边, 每次拿它去更新, 更新的边入队 diat[j] = min(diat[j],dist[t]+w) |
边数限定, 每次最多更新1条边 1.循环k次, 次数限定, 每次备份dist[], 防止连环更新距离, 走过的边>ki dist[b] = min(diat[a]+w) 2.若第k次依然更新则存在负环 |
bellman-ford队列做法, 优化:Bellman_ford会遍历 所有的边,但只用遍历距离变小的点所连接的边即可. 1.如果距离可更新则入队,且入队成员标记, 防止队列元素重复 2.判断负环和上面很像, 下面是区别: 开始n个点都要入队, 某个点更新n次, 则有环 |
无限暴力 |
| 注意事项 |
查找最短边: if(!st[j] && (t==-1 || dist[j] <dist[t])) |
标记过此点就不能再入队了 |
1. 有边数限制 2. if(dist[n] >= 0x3f3f3f3f/2)无路 |
1. 判断负环开始n个点都要入队, dist[]开始不用=inf 2. 队列中标记, 不在队中不标记 |
没啥 |
1) st数组的作用:判断当前的点是否已经加入到队列当中了;已经加入队列的结点就不需要反复的把该点加入到队列中了,就算此次还是会更新到源点的距离,那只用更新一下数值而不用加入到队列当中。
即便不使用st数组最终也没有什么关系,但是使用的好处在于可以提升效率。
2) SPFA算法看上去和Dijstra算法长得有一些像但是其中的意义还是相差甚远的:1] Dijkstra算法中的st数组保存的是当前确定了到源点距离最小的点,且一旦确定了最小那么就不可逆了(不可标记为true后改变为false);SPFA算法中的st数组仅仅只是表示的当前发生过更新的点,且spfa中的st数组可逆(可以在标记为true之后又标记为false)。顺带一提的是BFS中的st数组记录的是当前已经被遍历过的点。
2] Dijkstra算法里使用的是优先队列保存的是当前未确定最小距离的点,目的是快速的取出当前到源点距离最小的点;SPFA算法中使用的是队列(你也可以使用别的数据结构),目的只是记录一下当前发生过更新的点。3) ⭐️Bellman_ford算法里最后return-1的判断条件写的是dist[n]>0x3f3f3f3f/2;而spfa算法写的是dist[n]==0x3f3f3f3f;其原因在于Bellman_ford算法会遍历所有的边,因此不管是不是和源点连通的边它都会得到更新;但是SPFA算法不一样,它相当于采用了BFS,因此遍历到的结点都是与源点连通的,因此如果你要求的n和源点不连通,它不会得到更新,还是保持的0x3f3f3f3f。
4) ⭐️ Bellman_ford算法可以存在负权回路,是因为其循环的次数是有限制的因此最终不会发生死循环;但是SPFA算法不可以,由于用了队列来存储,只要发生了更新就会不断的入队,因此假如有负权回路请你不要用SPFA否则会死循环。
5) ⭐️由于SPFA算法是由Bellman_ford算法优化而来,在最坏的情况下时间复杂度和它一样即时间复杂度为 O(nm)O(nm) ,假如题目时间允许可以直接用SPFA算法去解Dijkstra算法的题目。(好像SPFA有点小小万能的感觉?)
6) ⭐️求负环一般使用SPFA算法,方法是用一个cnt数组记录每个点到源点的边数,一个点被更新一次就+1,一旦有点的边数达到了n那就证明存在了负环。
部分转自 作者:orzorz 链接:https://www.acwing.com/solution/content/9306/
// dijkstra堆优化, 每个点只能用一次, 用它更新过就不能再用了, 值得注意的是, 每次在循环最前面标记即可, 已标记则跳过 #include <iostream> #include <cstring> #include <queue> using namespace std; const int N = 1e5 + 5e4; typedef pair<int,int> PII; int e[N], h[N], ne[N], w[N], idx; int n, dist[N]; bool st[N]; void add(int a, int b, int c) { e[idx] = b, ne[idx] = h[a], h[a] = idx, w[idx ++] = c; } void dijkstra() { memset(dist, 0x3f, sizeof dist); dist[1] = 0; priority_queue<PII, vector<PII>, greater<PII>> q; q.push({0,1}); while(q.size()) { PII t = q.top(); int x = t.second; q.pop(); if(st[x])continue; st[x]=1; for(int i = h[x]; i != -1; i = ne[i]) { int j = e[i]; if(dist[j] > dist[x] + w[i]) { dist[j]=dist[x]+w[i]; q.push({dist[j], j}); } } } if(dist[n]==0x3f3f3f3f)puts("-1"); else cout << dist[n] << '\n'; } int main() { int m; cin >> n >> m; memset(h, -1, sizeof h); while(m --) { int a, b, c; cin >> a >> b >> c; add(a,b,c); } dijkstra(); }
// bellman_ford的思维, 每个点最多更新n-1次, 那么放心大胆的标记吧, 不会超时循环很多次 // 在队中的不能重复入队就行, #include <iostream> #include <cstring> #include <queue> using namespace std; const int N = 1e5 + 10; int e[N], ne[N], h[N], w[N], idx; int n, m, dist[N]; bool st[N]; void add(int a, int b, int c) { e[idx]=b, ne[idx]=h[a], h[a]=idx, w[idx ++]=c; } void spfa() { memset(dist, 0x3f, sizeof dist); dist[1] = 0; queue<int> q; q.push(1); st[1] = 1; while(q.size()) { int t = q.front(); q.pop(); st[t] = 0; for(int i = h[t]; i != -1; i = ne[i]) { int j = e[i]; if(dist[j] > dist[t] + w[i]) { dist[j] = dist[t] + w[i]; if(!st[j])q.push(j), st[j] =1; } } } if(dist[n] >= 0x3f3f3f3f/2)puts("impossible"); else cout << dist[n] << '\n'; return; } int main() { cin >> n >> m; for(int i = 0; i <= n; i ++)h[i] = -1; for(int i = 0; i <m; i ++) { int a, b, c; cin >> a >> b >> c; add(a,b,c); } spfa(); return 0; }
