
ROS的常用命令
1、Ros的常用命令
rostopic
rosservice
rosnode
rosparam
rosmsg
rossrv
2、例子
运行roscore#作用是启动ros master
运行rosrun turtlesim turtlesim_node#启动海龟仿真器
运行rosrun turtlesim turtle_teleop_key#启动海龟控制节点
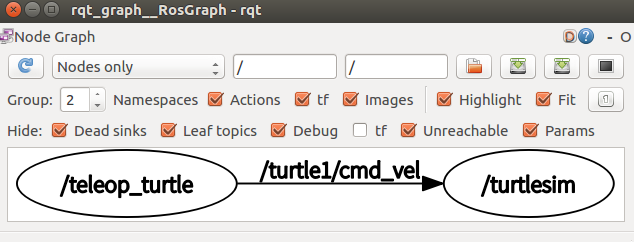
a.使用rqt_graph 查看系统计算图
b.使用rosnode list 查看所有节点

c.使用rosnode info /turtlesim 查看turtlesim节点的详细信息

d.使用rostopic list 查看所有话题
e.使用rostopic pub 话题名 消息类型和内容(双击tab键补全默认结构) 用命令的形式控制小海龟
f.使用rosmsg show 消息名 查看数据结构
g.使用rosservice list 查看所有服务
h.使用rosservice call /spawn 信息(双击tab键补全默认结构) 生成第二只海龟
i.使用rosbag record -a -O cmd_record 话题记录工具,将信息保存在cmd_record文件中
j.使用rosbag play cmd_record 运行保存的话题

 浙公网安备 33010602011771号
浙公网安备 33010602011771号