

从全连接层到卷积
我们之前讨论的多层感知机十分适合处理表格数据,其中行对应样本,列对应特征。 对于表格数据,我们寻找的模式可能涉及特征之间的交互,但是我们不能预先假设任何与特征交互相关的先验结构。 此时,多层感知机可能是最好的选择,然而对于高维感知数据,这种缺少结构的网络可能会变得不实用。
例如,在之前猫狗分类的例子中:假设我们有一个足够充分的照片数据集,数据集中是拥有标注的照片,每张照片具有百万级像素,这意味着网络的每次输入都有一百万个维度。 即使将隐藏层维度降低到1000,这个全连接层也将有
不变性
平移不变性
不管检测对象出现在图像中的哪个位置,神经网络的前面几层应该对相同的图像区域具有相似的反应,即为“平移不变性”
局部性
神经网络的前面几层应该只探索输入图像中的局部区域,而不过度在意图像中相隔较远区域的关系,这就是“局部性”原则。最终,可以聚合这些局部特征,以在整个图像级别进行预测。
多层感知机的限制
假设多层感知机的输入是
因为每个像素点都需要和其他像素点联系,故每个像素点都需要一个二阶的权重张量,又由于是二维图像,故最终权重张量
再假设偏置参数为
为了方便表示,我们对下标
即上述可表述为公式:
1.平移不变性
现在引入平移不变性,即检测对象在输入
这就是所谓卷积,使用系数
2.局部性
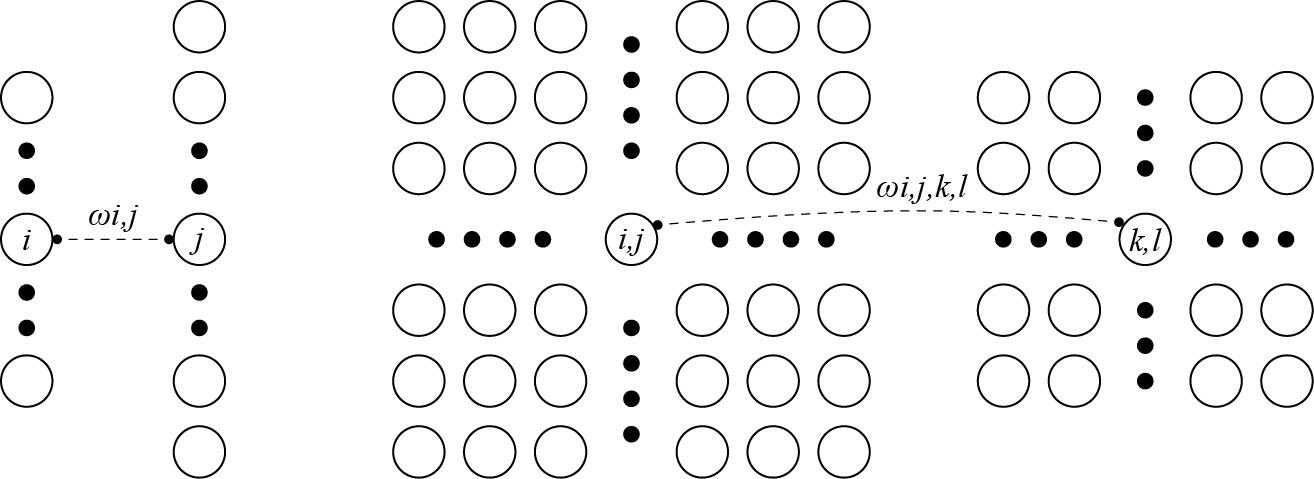
对于上述的
具体如图所示


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)