
【深度学习pytorch】卷积神经网络
图像卷积
互相关运算:
def corr2d(X, K): h, w = K.shape Y = torch.zeros(X.shape[0]-h+1, X.shape[1]-w+1) for i in range(Y.shape[0]): for j in range(Y.shape[1]): Y[i,j] = (X[i:i+h, j:j+w] * K).sum() return Y
卷积层:
class Conv2D(nn.Module): def __init__(self, kernel_size): super().__init__() self.weight = nn.Parameter(torch.rand(kernel_size)) self.bias = nn.Parameter(torch.zeros(1)) def forward(self, x): return corr2d(x, self.weight) + self.bias
简单运用:边缘检测
通过找到像素变化的位置,来检测图像中不同颜色的边缘。 首先,我们构造一个6×8像素的黑白图像。中间四列为黑色(0),其余像素为白色(1)

接下来,我们构造一个高度为1、宽度为2的卷积核K。当进行互相关运算时,如果水平相邻的两元素相同,则输出为零,否则输出为非零。
![]()
对参数X(输入)和K(卷积核)执行互相关运算。 如下所示,输出Y中的1代表从白色到黑色的边缘,-1代表从黑色到白色的边缘,其他情况的输出为0
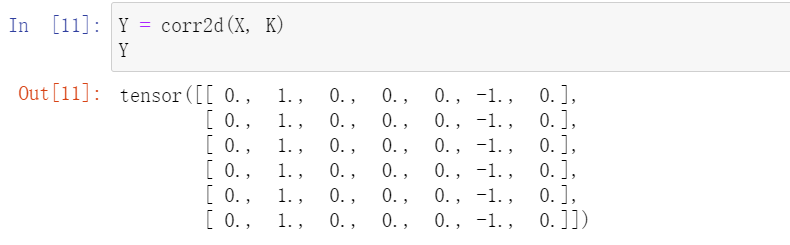
学习卷积核
学习由X生成Y的卷积核呢
先构造一个卷积层,并将其卷积核初始化为随机张量。接下来,在每次迭代中,我们比较Y与卷积层输出的平方误差,然后计算梯度来更新卷积核。

# 构造一个二维卷积层,它具有1个输出通道和形状为(1,2)的卷积核 conv2d = nn.Conv2d(1,1, kernel_size=(1, 2), bias=False) # 这个二维卷积层使用四维输入和输出格式(批量大小、通道、高度、宽度), # 其中批量大小和通道数都为1 X = X.reshape((1, 1, 6, 8)) Y = Y.reshape((1, 1, 6, 7)) lr = 3e-2 # 学习率 for i in range(10): Y_hat = conv2d(X) l = (Y_hat - Y) ** 2 conv2d.zero_grad() l.sum().backward() # 迭代卷积核 conv2d.weight.data[:] -= lr * conv2d.weight.gradprint(f'epoch {i+1}, loss {l.sum():.3f}')
填充和步幅
填充: 防止多层卷积丢失边缘像素
步幅:快速降维提高效率
参数举例:
conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1, stride=2)
conv2d = nn.Conv2d(1, 1, kernel_size=(3, 5), padding=(0, 1), stride=(3, 4))
多输入多输出通道
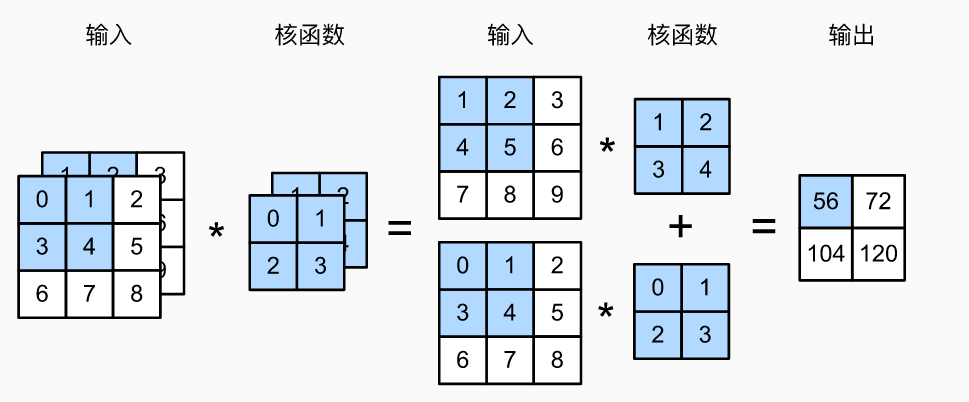
import torch # 多输入通道 def corr2d_multi_in(X, K): # 先遍历“X”和“K”的第0个维度(通道维度),再把它们加在一起 return sum(d2l.corr2d(x, k) for x, k in zip(X, K)) # 多输出通道 def corr2d_multi_in_out(X, K): # 迭代“K”的第0个维度,每次都对输入“X”执行互相关运算。 # 最后将所有结果都叠加在一起 return torch.stack([corr2d_multi_in(X, k) for k in K], 0)
汇聚层(Pooling)
最大汇聚层、平均汇聚层
pool2d = nn.MaxPool2d(3) pool2d(X) pool2d = nn.MaxPool2d(3, padding=1, stride=2) pool2d(X) pool2d = nn.MaxPool2d((2, 3), stride=(2, 3), padding=(0, 1)) pool2d(X)


【推荐】国内首个AI IDE,深度理解中文开发场景,立即下载体验Trae
【推荐】编程新体验,更懂你的AI,立即体验豆包MarsCode编程助手
【推荐】抖音旗下AI助手豆包,你的智能百科全书,全免费不限次数
【推荐】轻量又高性能的 SSH 工具 IShell:AI 加持,快人一步
· 震惊!C++程序真的从main开始吗?99%的程序员都答错了
· 别再用vector<bool>了!Google高级工程师:这可能是STL最大的设计失误
· 单元测试从入门到精通
· 【硬核科普】Trae如何「偷看」你的代码?零基础破解AI编程运行原理
· 上周热点回顾(3.3-3.9)