【Rosbridge】 Ros 与 Android 通信(通信演示)
系列博客第一篇: 配置编译 apk 文件
系列博客第二篇: 调试跑通 apk 文件
系列博客第三篇: 通信演示
我的实验环境
- Windows 10(android虚拟机蓝叠)
- Ubuntu 18.04 (ROS)
- 已经完成的安卓apk
Ros 端
- 启动ros
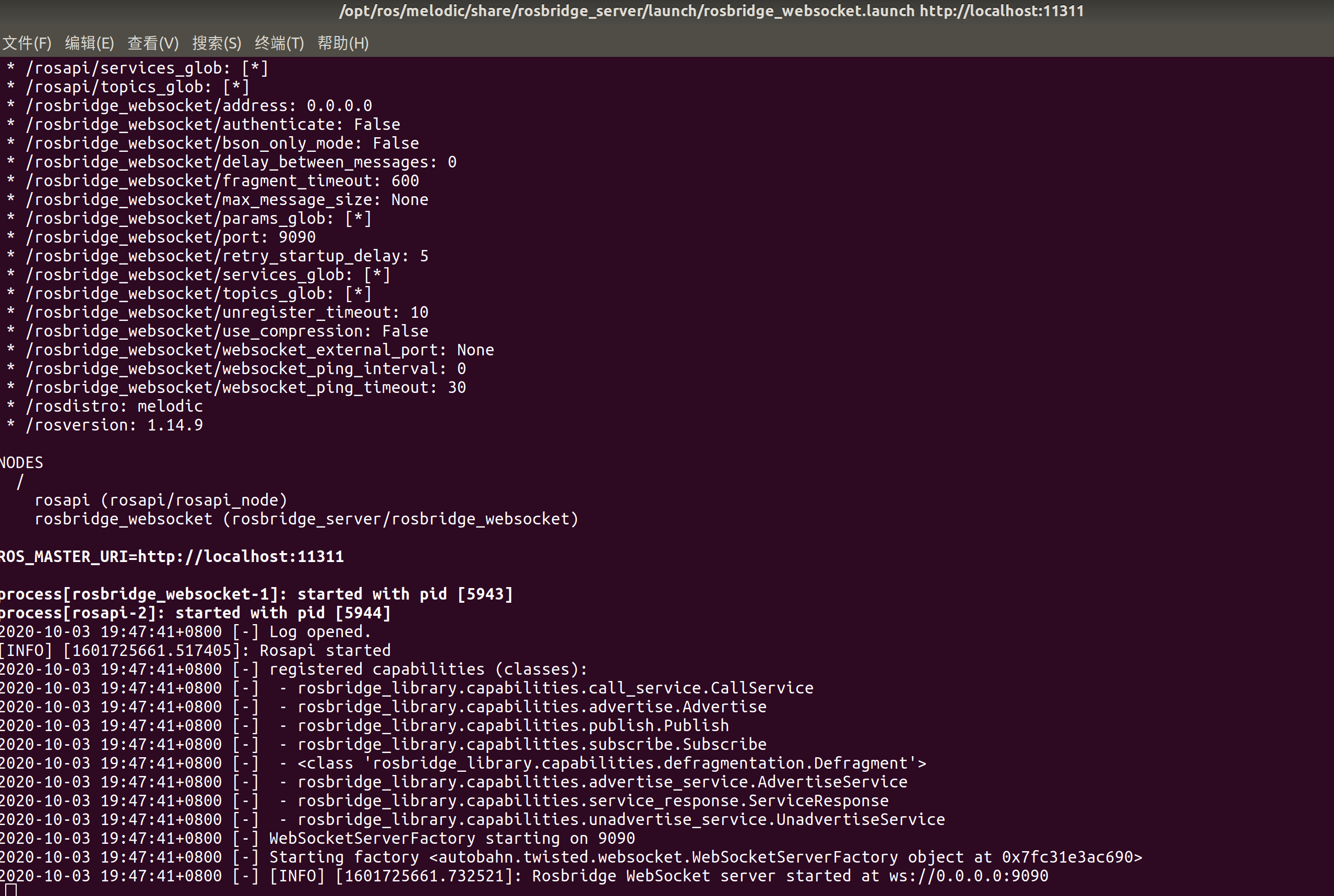
roscore - 打开websocket服务
roslaunch rosbridge_server rosbridge_websocket.launch
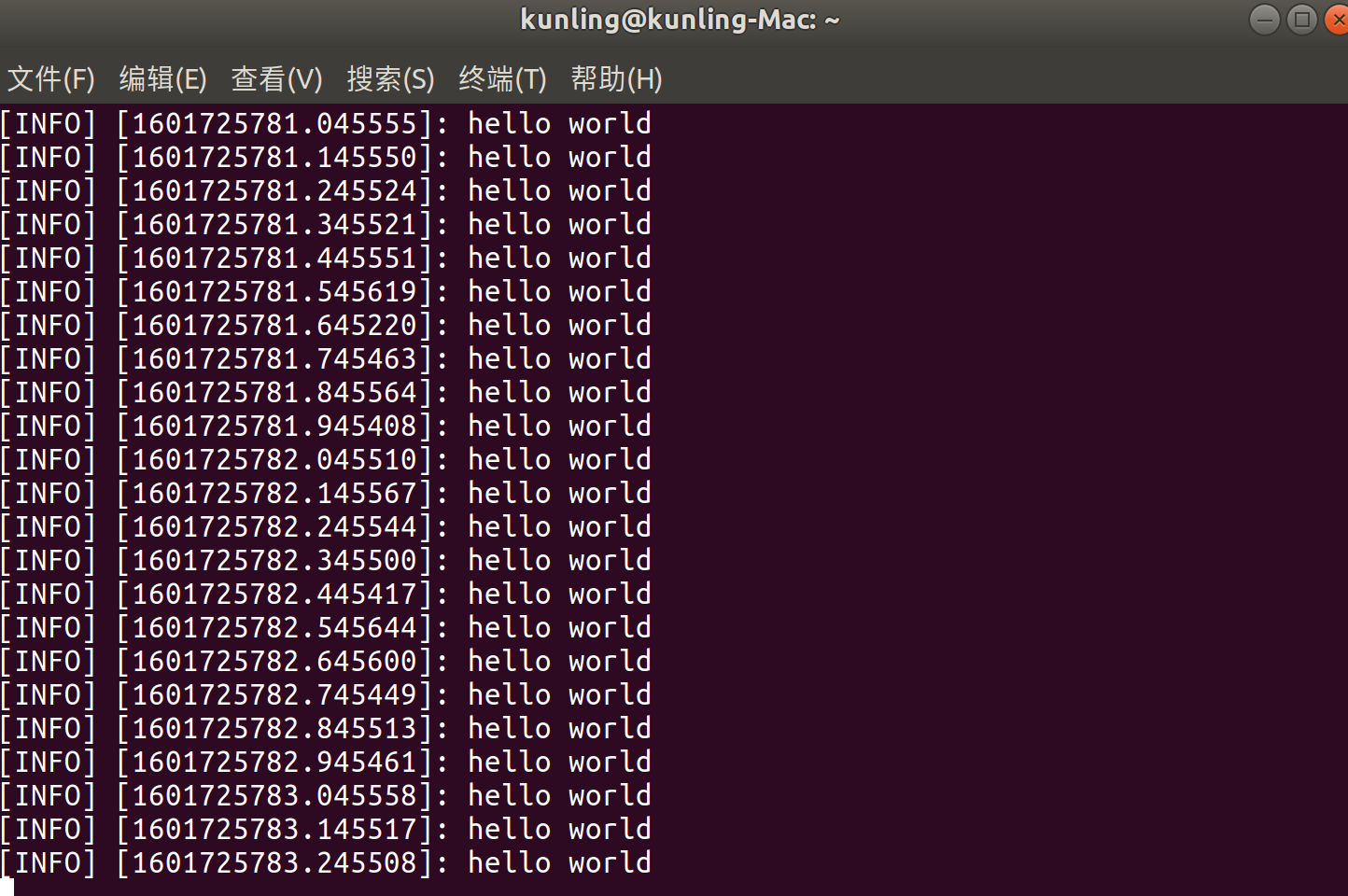
- 启动hello world脚本
rosrun beginner_tutorials test.py
要建一个包,test.py代码在Android和ROS的通信 消息的传递
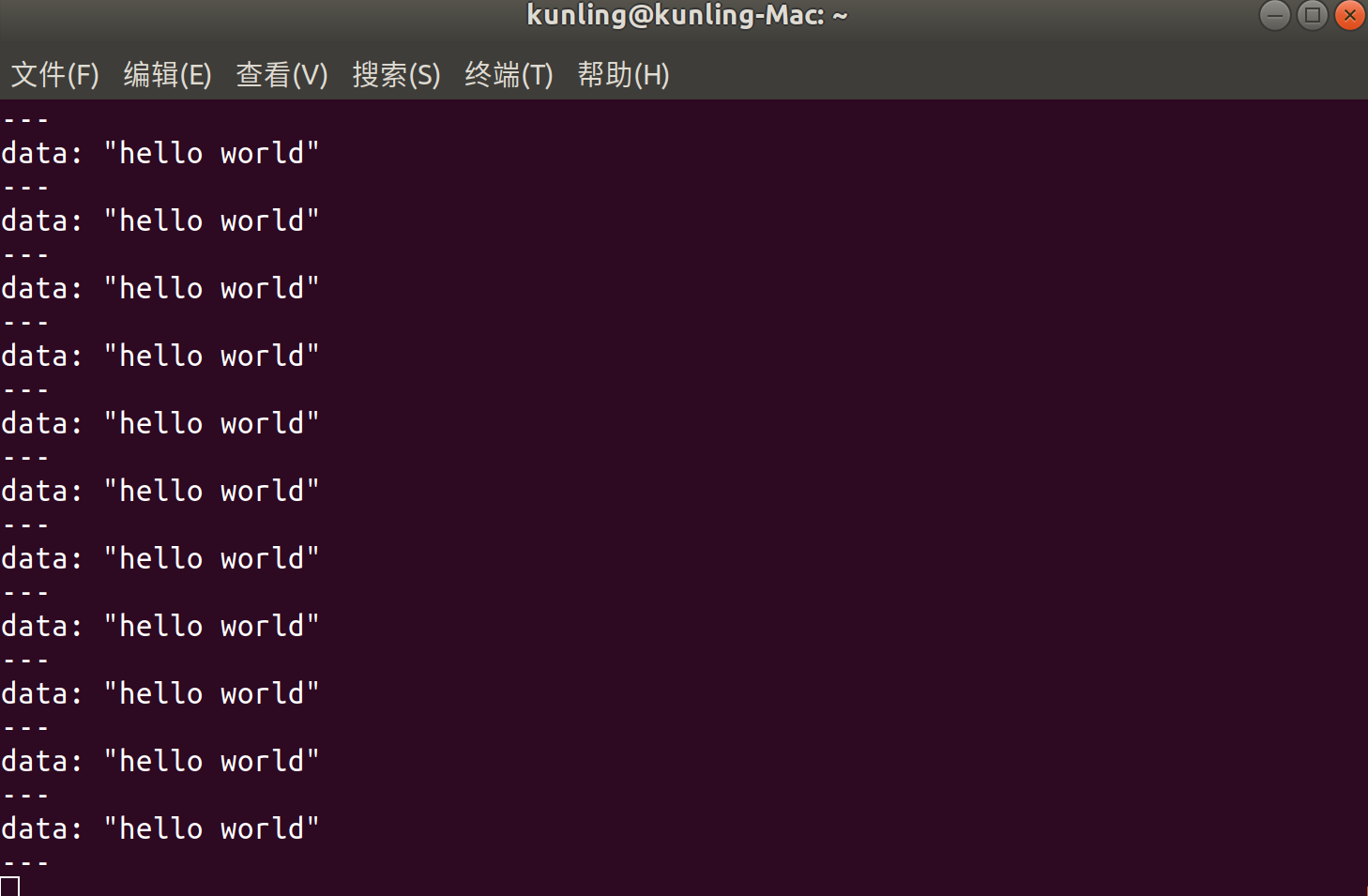
- 启动显示
rostopic echo /chatter
Android 端
- 启动模拟器,打开软件
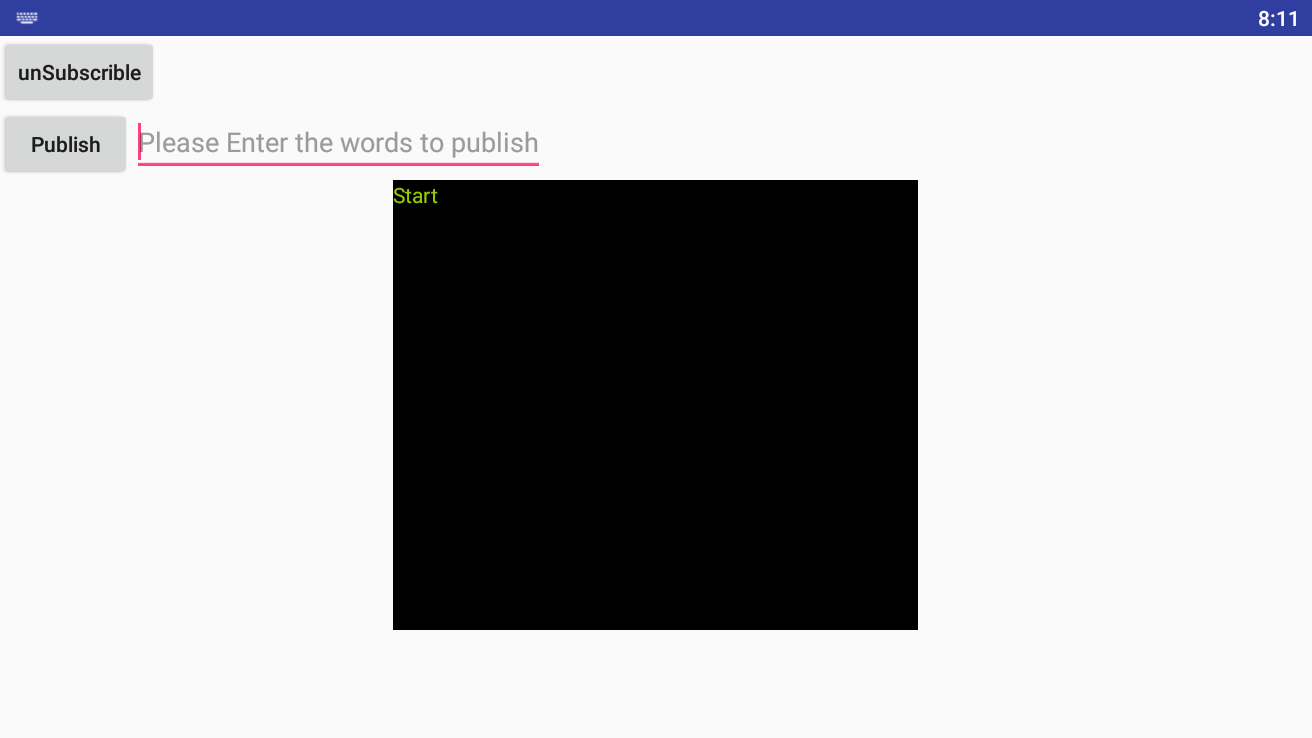
主要功能
有个聊天室主题 /chatter
- test.py 可以持续发布 hello world 到聊天室中
- 安卓可以订阅subscribe这个聊天室,显示在黑屏幕上
- publish 这个按钮在按下的时候 向聊天室发布start 抬起的时候发布stop
- 输入框的功能好像还没有做好
- 可能会出续集 完善一些功能
参考资料
至此,那篇博客Android和ROS的通信 消息的传递 的复现已经全部完成。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号