
ndt算法学习
NDT算法原理:
NDT算法的基本思想是先根据参考数据(reference scan)来构建多维变量的正态分布, 如果变换参数能使得两幅激光数据匹配的很好,那么变换点在参考系中的概率密度将会很大。
因此,可以考虑用优化的方法求出使得概率密度之和最大的变换参数,此时两幅激光点云数 据将匹配的最好。
算法流程:
- 将空间(reference scan)划分成各个格子cell
- 将点云投票到各个格子
-
计算格子的正态分布PDF参数
-
将第二幅scan的每个点按转移矩阵T的变换
-
第二幅scan的点落于reference的哪个 格子,计算响应的概率分布函数

-
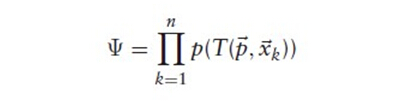
求所有点的最优值,目标函数为
NDT算法关键点:
1、将二维空间划分为固定大小网格,每个网格至少包括3个点(一般5个)
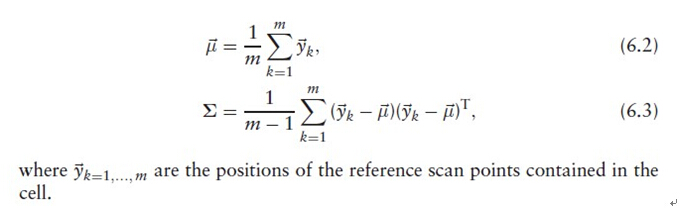
2、计算网格中点集的均值μ
3、计算网格中点集的协方差矩阵Σ
4、网格中的观测到点x的概率p(x)服从正态分布N( μ,Σ)。
NDT关键代码示例:
1、加载输入点云和目标点云
auto target_cloud = read_cloud_point("cloud1.pcd");
auto input_cloud = read_cloud_point("cloud2.pcd");
2、点云滤波
approximate_voxel_filter.setLeafSize(0.5, 0.5, 0.5);
approximate_voxel_filter.setInputCloud(input_cloud);
approximate_voxel_filter.filter(*filtered_cloud);
3、配置点云参数
pcl::NormalDistributionsTransform<pcl::PointXYZ, pcl::PointXYZ> ndt;
ndt.setTransformationEpsilon(0.01); //收敛数
ndt.setStepSize(0.1); //步长
ndt.setResolution(1.0); //格子边长
ndt.setMaximumIterations(30); //迭代次数
ndt.setInputSource(filtered_cloud);
ndt.setInputTarget(target_cloud);
4、设置初始值
Eigen::AngleAxisf init_rotation(0.0, Eigen::Vector3f::UnitZ());
Eigen::Translation3f init_translation (0, 0, 0);
Eigen::Matrix4f init_guess = (init_translation * init_rotation).matrix();
5、开始配准
pcl::PointCloud<pcl::PointXYZ>::Ptr output_cloud (new pcl::PointCloud<pcl::PointXYZ>);
ndt.align(*output_cloud, init_guess);
6、保存配准的点云图
pcl::transformPointCloud(*input_cloud, *output_cloud, ndt.getFinalTransformation());
pcl::io::savePCDFileASCII("cloud3.pcd", *output_cloud);

posted on 2018-09-21 15:15 kuangxionghui 阅读(5420) 评论(0) 编辑 收藏 举报

