
自动驾驶测试全流程
随着汽车电子化和高级辅助驾驶技术的快速发展,自动驾驶作为辅助驾驶技术的高级阶段,已成为全球范围内的一个新的技术研究热点和重点。尤其近年来,自动驾驶在人类交通发展史上取得了里程碑式的进步。
随着深度学习和计算机视觉技术的兴起,自动驾驶为提升交通安全与效率提供了新的解决方案。未来的自动驾驶汽车拥有全面的驾驶感知系统,可以识别道路交通标志、汽车、行人、路况等外部人和物,智能的决策系统对感知的信息快速处理和分析,执行系统精确的执行加速、制动、停车、转向等命令,未来的自动驾驶汽车不会闯红灯;不会酒驾;不会超速;不会疲劳;不会赌气;将会在很大程度上降低道路交通风险,每年可以挽救数十万人的生命。
虽然自动驾驶汽车的优点非常多,但有一个问题无法回避,自动驾驶安全吗?
要回答这个问题,就必须得了解自动驾驶算法是如何进行测试的,点击以下视频,三分钟带你解密自动驾驶算法的测试流程。坐稳,我们马上发车。
自动驾驶汽车测试是自动驾驶研发中的重要环节,也是自动驾驶技术发展的重要支撑,自动驾驶汽车本身结合了车辆技术,人工智能,模式识别,5G通讯,传感器融合等多领域,跨学科知识。跟传统的汽车测试有很大不相同,为了应对千变万化的交通场景,需要海量的数据对自动驾驶算法进行训练,通过不断的迭代,才能覆盖尽可能多的场景。并且测试会贯穿车辆的生命周期,即使车辆已经卖出,并上路行驶,也会定期远程升级,以便覆盖新的场景。
自动驾驶的开发测试流程通常包括:数据集创建、数据标注,模型训练、软件在环、硬件在环,道路测试,场景泛化,用户众包测试。
一、数据集创建指的是,在车型开发前期,根据车型的感知方案,来采集大量原始感知数据,用于算法训练,通常包含训练集和测试集两个部分;
自动驾驶时代,训练数据集非常重要,但是成本也比较高。训练数据集的构建分车端、本地端和云端三个环节。训练数据集海量数据的存储和处理是一个非常大的挑战,数据集的“清洗”提纯也是一个挑战。
二、数据标注指的是,通过人工或者一定的工具,将少量帧用手工标注,且是精细标注。大部分做机器标注,即简化标注。来给数据集添加真值信息,相当于为机器学习系统提供”标准答案”。

人工标注人员对于语义信息更加擅长,但是计算机对于几何,重建,三角化,跟踪更加擅长;同时,随着数据规模的增长,不可能无限地扩大标注团队的规模。所以,更加精确的数据标注需要标注人员和计算机协作进行。
三、模型训练指的是,自动驾驶AI模型迭代和优化的过程

向模型输入那些摄像头、雷达等传感器获取的原始数据,以数学模型算法来计算出最优驾驶决策,然后再直接输出给车辆方向系统和行车系统,最终形成符合路况的驾驶决策。
值得注意的一点是,随着不断贴合真实路况,模型算法也将被不断优化。
模型训练需要频繁在存储设备中读写数据,对存储系统性能要求较高,原始模型开发的过程中需要调用TB级的图片数据集,且模型在开发的过程中也会产生很多中间数据需要存储。
四、软件在环指的是,利用仿真的数据对ADAS的软件栈中的算法进行闭环测试

五、硬件在环指的是,利用仿真软件,实时机和硬件IO接口,对接到真实的ECU,在实时的环境进行算法测试。

硬件在环仿真是自动驾驶汽车技术测试与验证的重要环节,具有周期短、成本低及效率高等优点。
自动驾驶汽车,相对于传统车辆,验证成指数级增加。都依靠实车测试,从时间上和成本上都不现实,进行充分的仿真测试非常关键。
六、道路测试指的是,ADAS原型车在封闭的试验场或者开放的场地进行真实的道路测试。

自动驾驶汽车的道路测试分有两种,一种就是在开发的环境下进行真实的道路测试,而另一种则是在自动驾驶仿真测试平台上进行虚拟测试。而目前几乎所有车企和自动驾驶科技公司,均是以虚拟测试为主,真实的道路测试为辅。
七、场景泛化指的是,结合真实路试工况,通过数字孪生的方式来形成虚拟化的测试场景库,增加测试覆盖度。

八、用户众包测试是指,在量产阶段利用最终用户的车辆来收集稀有case,丰富场景库,并且对算法进行持续迭代。

以上就是自动驾驶测试流程介绍
自动驾驶汽车的测试流程通常包括以下几个阶段:
- 数据集创建。在车型开发前期,根据车型的感知方案采集大量原始数据,用于算法训练。这通常包括训练集和测试集。1
- 数据标注。通过人工或工具为数据集添加增值信息,为机器学习提供标准答案。
- 模型训练。对自动驾驶模型进行迭代和优化。
- 仿真测试。在虚拟环境中模拟各种危险情景,测试自动驾驶车辆的反应。这包括对特定场景的微调,以评估车辆对不同变量的反应。2
- 测试道路。在封闭试验场或开放场地进行真实的道路测试。首先在安全路段测试,然后逐步过渡到全程自动驾驶。
- 场景泛化。结合真实的路试工况,通过数字孪生技术形成虚拟化的测试场景库,增加测试覆盖度。
- 用户众包测试。在量产阶段,利用最终用户的车辆收集稀有案例,丰富场景库,并对算法进行持续迭代。
- 传感器测试。测试自动驾驶车辆使用的传感器,如摄像头、雷达、激光雷达等,评估其精度、稳定性、响应速度和适应性。3

为了保证数据采集的准确性,智能驾驶的数据采集车辆搭载了摄像头、雷达等大量不同的传感器。这些传感器从整车布置的安装结构设计、FOV校核,再到实车的装配标定,都需要保证位置准确和稳定,从而支持不同位置传感器数据可以顺利拼接。
实车采集过程中,需要尽可能覆盖各种用户场景。一般来说,道路状态、交通信号和标识、各类车辆和行人目标、天气环境等,都是影响智能驾驶的关键因素,路试采集场景需要涵盖城市、乡村、高速、隧道以及白天和夜晚等,以确保尽可能覆盖用户各种实际场景。
采集过程中,全面的了解测试进展以及测试车辆状态,保证测试数据的有效性,也是测试管理面临的重要挑战。因此需要用到车队管理系统,基于此系统可以实现:1、实时定位监控,车辆位置实时展示,包括车辆实时运动状态、实时车速等;2、实时报警事件消息推送,并在地图上动态展示报警的位置;3、车辆数据统计,包括里程统计、告警统计、状态统计等;4、驾驶员数据统计,具体包含驾驶员行车时间里程统计、告警统计、DMS监控数据统计等;5、驾驶员DMS监测和报警,对于报警消息实时提醒。
通过数据采集系统,可将自动驾驶车辆各类传感器类型的数据进行采集处理,包括常见的CAN、CANFD、 ETH车载以太网数据等。用户可以通过数据中心访问数据,进行后续数据分析、数据标注、数据回注等,从而形成完整的数据闭环。
自动驾驶汽车到底需要哪些类型的传感器?
自动驾驶汽车是集感知、决策和控制等功能于一体的自主交通工具,其中,感知系统代替人类驾驶人的视、听、触等功能,融合摄像机、雷达等传感器采集的海量交通环境数据,精确识别各类交通元素,为自动驾驶汽车决策系统提供支撑。
摄像头按视频采集方式分为:数字摄像头和模拟摄像头两大类。
车载上一般使用的是数字摄像头,它可以将视频采集设备产生的模拟视频信号转换成数字信号,进而将其储存在计算机里。
模拟摄像头只能将捕捉到的视频信号,经过特定的视频捕捉卡将模拟信号转换成数字模式,并加以压缩后才可以转换到计算机上运用。
举个例子来,我们使用的固定电话就属于模拟信号,它在通话过程中容易产生噪音(电流声或听不清)的情况。而我们的手机为了保持很好的通话质量,就将电话的模拟信号进行了数字化,手机之间的通话质量就非常清晰,同样原理使用数字摄像头能有效减少图像中的噪点和提升成像效果。
一句话概括:模拟视频信号是在一定的时间范围内可以有无限多个不同的取值。而数字视频信号是在模拟信号的基础上经过采样、量化和编码而形成的。模拟信号容易产生信号噪音和干扰,已逐步被数字信号取代。
图片来源:博世官网
雷达能够主动探测周边环境,比视觉传感器受外界环境影响更小,是自动驾驶汽车的重要传感器之一。雷达通过向目标发射电磁波并接收回波,从而获取目标距离、方位、距离变化率等数据。根据电磁波波段,雷达可细分为激光雷达、毫米波雷达和超声波雷达等3类。
自动驾驶场景库与虚拟仿真测试
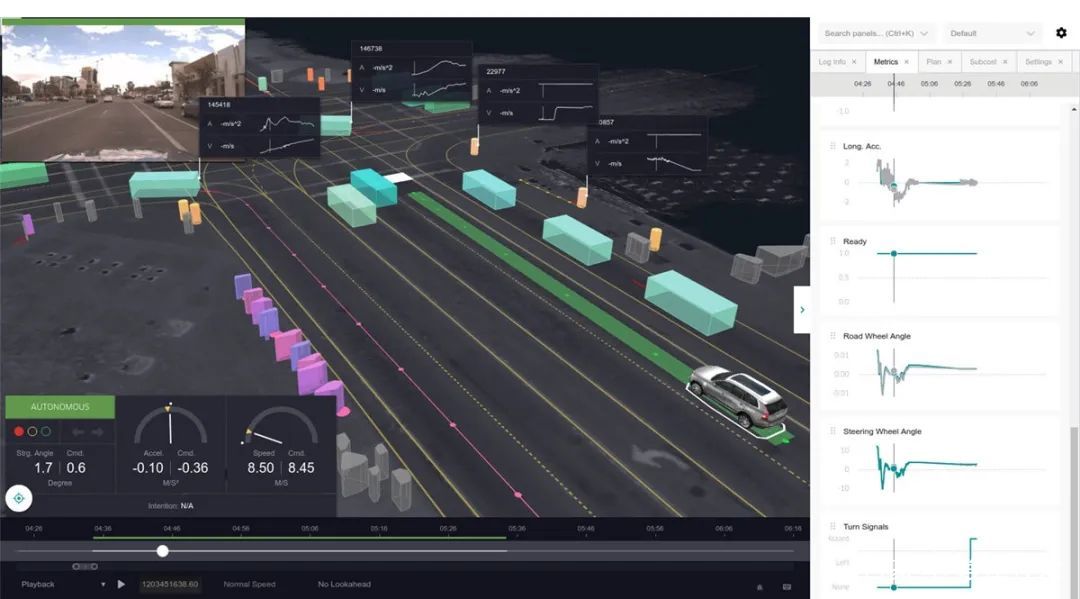 ▲ 某自动驾驶仿真软件的运行可视化界面
▲ 某自动驾驶仿真软件的运行可视化界面
自动驾驶场景分类都有哪些?
A-事故场景
事故可以看做是交通安全的一个浓缩机,能够体现出实际交通环境的高危场景,事故场景研究目前以深度事故研究数据为主, 如GIDAS, CIDAS等
B-开放道路场景
开放道路场景来源于人们的日常驾驶数据以及实车道路测试数据,道路场景能够很好地体现随机性、复杂性以及区域特征,可用于分析真实的交通环境和驾驶行为特征
C-法规标准场景
国内外法律法规涉及的场景, 如GB/ISO/ECE/NHTSA/SAE/Euro-NCAP等机构组织的测试标准,法规标准场景是自动驾驶功能在研发和定义阶段需要满足的最基本要求
D-功能交互场景:
AD AS系统或自动驾驶系统是由横向、纵向-预警或控制等多个子功能构成的, 各个功能之间经常存在功能交互区域, 如ACC和AEB系统都对车辆的纵向运动进行控制, 两功能在交互场景区域作用时是否存在问题需要进行验证;功能交互场景能够测试智能系统功能逻辑交互上的重叠区与间隔区,发现功能交互漏洞与逻辑混乱等问题
E-虚拟重构场景
真实驾驶过程中场景数目是无限的,使用参数随机生成算法可以重组场景:虚拟重构场景,能够补充大量来知工况的测试场景,打破数据采集的局限性。
自动驾驶汽车的场地测试分有两种,一种就是在开发的环境下进行真实的道路测试,而另一种则是在自动驾驶仿真测试平台上进行虚拟测试。而目前几乎所有车企和自动驾驶科技公司,均是以虚拟测试为主,真实的道路测试为辅。
结合工业和信息化部、公安部、交通运输部等三部委共同发布的《智能网联汽车道路测试管理规范(试行)》,“考试项目”设置可以包含以下几个方面:
1、基本交通管理设施检测与响应能力测试,测试内容应包含《GB5768 道路交通标志和标线》、《GB14887 道路交通信号灯》、《GB14886道路交通信号灯设置与安装规范》等标准要求的道路交通设施种类和安装规范等内容;
2、前方车道内动静态目标(机动车、非机动车、行人、障碍物等)识别与响应能力测试,测试内容应包含感知识别不同目标(非机动车、行人、障碍物)的类型和状态、跟随不同交通参与者(机动车、非机动车、行人)行驶、车速车距控制等内容;
3、遵守规则行车能力测试,测试内容应包含超车、并道、通过交叉口等内容;
4、安全接管与应急制动能力测试,测试内容应包含靠边停车与起步、应急车道内停车、人工接管等内容;
5、综合能力测试,综合考察自动驾驶汽车对交通语言认知能力、安全文明驾驶能力、复杂环境通行能力、多参与对象协同行驶能力、网联通讯能力等内容。
未来的自动驾驶汽车对安全性要求极其严格,需要通过灵活的测试,才能实现快速创新,同时保证测试严格性和效率。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号