牛顿法、拟牛顿法、阻尼牛顿法、修正牛顿法
牛顿法的思想是利用目标函数的二次Taylor展开模型的极小点去逼近目标函数的极小点。
设f(x)二次连续可微,Hesse矩阵正定,在xk附近展开f

令等式取0,得牛顿迭代公式
 ,即
,即

当初始点距离最优解较远时,Gk不一定正定,迭代不一定收敛,因此引入了步长因子α
带步长因子的牛顿法,即阻尼牛顿法,迭代格式如下:
其中α由线性搜索得到。
牛顿法的关键是计算Hesse矩阵,但对于一般的函数Hesse矩阵不容易计算,为克服这个缺陷,提出了拟牛顿法和修正牛顿法
修正牛顿法的思想是用G+μI来代替G,因为只要μ充分大,就能保证G+μI正定
拟牛顿法与牛顿法的区别在于用Hesse矩阵的近似B来代替G,其中B是对称正定的
拟牛顿法的一般步骤如下:
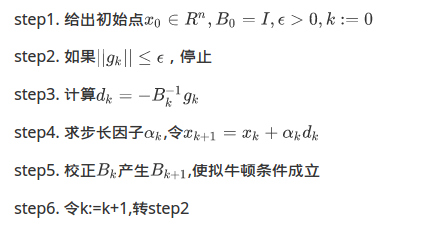
其中拟牛顿条件为

关于Bk的校正有两种方法——DFP校正和BFGS校正
DFP校正公式为

BFGS校正公式为

下面给出这几种方法的python实现
阻尼牛顿法:
from linear_search.wolfe import * from linear_search.Function import * from numpy import * def newton(f, start): fun = Function(f) x = array(start) g = fun.grad(x) while fun.norm(x) > 0.01: G = fun.hesse(x) d = (-dot(linalg.inv(G), g)).tolist()[0] alpha = wolfe(f, x, d) x = x + alpha * array(d) g = fun.grad(x) return x
拟牛顿法:
# coding=utf-8 from linear_search.wolfe import * from linear_search.Function import * from numpy import * # 拟牛顿法 def simu_newton(f, start): n=size(start) fun = Function(f) x = array(start) g = fun.grad(x) B=eye(n) while fun.norm(x) > 0.01: d = (-dot(linalg.inv(B), g)).tolist() alpha = wolfe(f, x, d) x_d=array([alpha * array(d)]) x = x + alpha * array(d) g_d=array([fun.grad(x)-g]) g = fun.grad(x) B_d=dot(B,x_d.T) B=B+dot(g_d.T,g_d)/dot(g_d,x_d.T)-dot(B_d,B_d.T)/dot(x_d,B_d) return x

 浙公网安备 33010602011771号
浙公网安备 33010602011771号