
矩阵运算(平移、缩放、旋转)
(x',y',z')表示新的位置,
(x,y,z)表示当前位置,
(dx,dy,dz)平移的量。
加法2D平移
\[\begin{bmatrix}
x' \\
y' \\
\end{bmatrix}
=
\begin{bmatrix}
x \\
y \\
\end{bmatrix}
+
\begin{bmatrix}
dx \\
dy \\
\end{bmatrix}
\]
加法3D平移
\[\begin{bmatrix}
x' \\
y' \\
z' \\
\end{bmatrix}
=
\begin{bmatrix}
x \\
y \\
z \\
\end{bmatrix}
+
\begin{bmatrix}
dx \\
dy \\
dz \\
\end{bmatrix}
\]
乘法2D平移
\[\begin{bmatrix}
x' \\
y' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
1 & 0 & dx \\
0 & 1 & dy \\
0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
1(x) + 0(y) + dx(1) \\
0(x) + 1(y) + dy(1) \\
0(x) + 0(y) + 1(1) \\
\end{bmatrix}
\]
乘法3D平移
\[\begin{bmatrix}
x' \\
y' \\
z' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
1 & 0 & 0 & dx \\
0 & 1 & 0 & dy \\
0 & 0 & 1 & dz \\
0 & 0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
1(x) + 0(y) +0(z) + dx(1) \\
0(x) + 1(y) +0(z) + dy(1) \\
0(x) + 0(y) +1(z) + dz(1) \\
0(x) + 0(y) +0(z) + 1(1) \\
\end{bmatrix}
\]
(x',y',z')表示一个点经过缩放后的新位置,
(x,y,z)表示未缩放前的原始位置,
Sx、Sy、Sz分别表示在x轴、y轴和z轴方向上的缩放因子。
注意:计算多个点的缩放,需要将每个点位置分别代入公式计算。
2D缩放
\[\begin{bmatrix}
x' \\
y' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
Sx & 0 & 0 \\
0 & Sy & 0 \\
0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
Sx(x) + 0(y) + 0(1) \\
0(x) + Sy(y) + 0(1) \\
0(x) + 0(y) + 1(1) \\
\end{bmatrix}
\]
3D缩放
\[\begin{bmatrix}
x' \\
y' \\
z' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
Sx & 0 & 0 & 0 \\
0 & Sy & 0 & 0 \\
0 & 0 & Sz & 0 \\
0 & 0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
Sx(x) + 0(y) +0(z) + 0(1) \\
0(x) + Sy(y) +0(z) + 0(1) \\
0(x) + 0(y) +Sz(z) + 0(1) \\
0(x) + 0(y) +0(z) + 1(1) \\
\end{bmatrix}
\]
2D旋转
(x',y',z')表示一个点经过旋转后的新位置,
(x,y,z)表示未旋转前的原始位置,
\(\theta\)为旋转角度(编程中以弧度为单位)
注意:计算多个点的旋转,需要将每个点位置分别代入公式计算。
\[\begin{bmatrix}
x' \\
y' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
cos \theta & -sin \theta & 0 \\
sin \theta & cos \theta & 0 \\
0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
1 \\
\end{bmatrix}
\]
绕Z轴3D旋转
\[\begin{bmatrix}
x' \\
y' \\
z' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
cos \theta & -sin \theta & 0 & 0 \\
sin \theta & cos \theta & 0 & 0 \\
0 & 0 & 1 & 0 \\
0 & 0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
1 \\
\end{bmatrix}
\]
绕X轴3D旋转
\[\begin{bmatrix}
x' \\
y' \\
z' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
1 & 0 & 0 & 0 \\
0 & cos \theta & -sin \theta & 0 \\
0 & sin \theta & cos \theta & 0 \\
0 & 0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
1 \\
\end{bmatrix}
\]
绕Y轴3D旋转
\[\begin{bmatrix}
x' \\
y' \\
z' \\
1 \\
\end{bmatrix}
=
\begin{bmatrix}
cos \theta & 0 & sin \theta & 0 \\
0 & 1 & 0 & 0 \\
-sin \theta & 0 & cos \theta & 0 \\
0 & 0 & 0 & 1 \\
\end{bmatrix}
\begin{bmatrix}
x \\
y \\
z \\
1 \\
\end{bmatrix}
\]
| 转换 | 方法 | 矩阵值 | 显示结果 | 说明 |
|---|---|---|---|---|
| 平移(置换) | translate(tx, ty) | 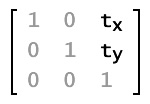 |
 |
将图像 tx 像素向右移动,将 ty 像素向下移动。 |
| 缩放 | scale(sx, sy) | 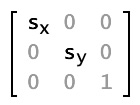 |
 |
将每个像素的位置乘以 x 轴的 sx 和 y 轴的 sy,从而调整图像的大小。 |
| 旋转 | rotate(q) | 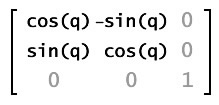 |
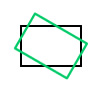 |
将图像旋转一个以弧度为单位的角度 q。 |
| 倾斜或剪切 | 无;必须设置属性 b 和 c | 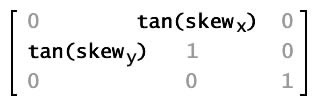 |
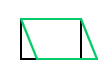 |
以平行于 x 轴或 y 轴的方向逐渐滑动图像。Matrix 对象的 b 属性表示斜角沿 y 轴的正切;Matrix 对象的 c 属性表示斜角沿 x 轴的正切。 |
四元数实现旋转
https://zhuanlan.zhihu.com/p/27471300?group_id=862339882582945792
https://www.cnblogs.com/hjlweilong/p/6018213.html
https://blog.csdn.net/linyijiong/article/details/79777399
https://www.cnblogs.com/jins-note/p/9512753.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号